Objective
In this lesson we’ll show how to use Bluetooth to control smart car remotely.
Parts and Devices
washer
|
|
|
|
Screw Number |
|
|
 |
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts
washer |
L298N MOTOR driver module
|
|
|
M3 X 10 Screws and nuts
washer |
Box for 18650 3.7V battery+
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M2 X 10 Screws and nuts
washer |
|
|
|
|
M1.5 X 8 Screws and nuts |
Mount holder for servo motor and ultrasonic module
|
|
|
M3 X 10 Screws and nutsM2 x 10 Screws and nuts |
|
|
|
|
M3 X 10 Screws and nuts
washer |
|
|
|
|
M3 X 10 Screws and nuts |
|
|
|
|
|
|
|
 |
|
M3 X 10 Screws and nuts |
|
|
 |
|
M3 X 10 Screws and nuts |
Hardware Installation
1)The installation in this lesson needs to add sensors on Lesson 5 framework. If you haven’t finished the assembly in Lesson 1 , please review Lesson 5 and complete the installation first.
OSOYOO Robot Car Starter Kit Lesson 1: Install UNO R3 Board and Motors on Chassis
Connect Bluetooth module to ESP8266 expansion board as blow picture:
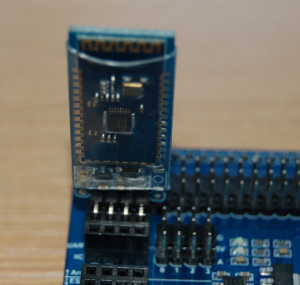
Turn switch on esp8266 to 12 to disconnected from Uno board while uploading the code from your PC to the OSOYOO Basic board

Software Installation:
Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step)
Download Arduino IDe from https://www.arduino.cc/en/Main/Software?setlang=en , then install the software.
Step 2:Download Lesson One sample code from https://osoyoo.com/driver/smartcar-lesson6.zip , unzip the download zip file smartcar-lesson5.zip, you will see a folder called smartcar-lesson5.
Step 3: Connect Arduino UNO to PC with USB cable, use Arduino IDE to open the file smartcar-lesson5.ino in smartcar-lesson5 folder, load the code into arduino
Once the software uploading is complete, turn on switch

Step 4 Download Android APP from link:https://osoyoo.com/driver/car.apk
Download and install the app.
Final Testing :
Step 1:Turn on power swith on battery box
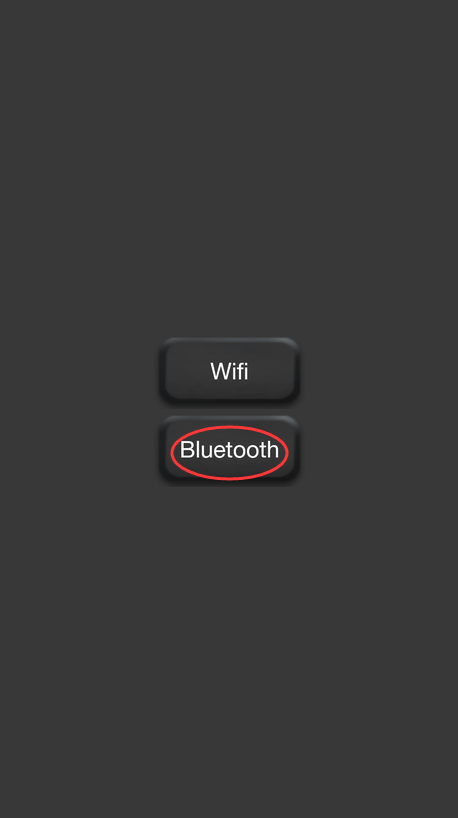
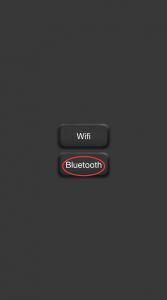
Step 2:Open bluetooth on your smart phone and search device and conpair, the default passkey is 1234 or 0000, once paired. open smart car app and click bluetooth mode:
You’ll go to bluetooth mode interface, click connect button to connect with bluetooth samrt car.
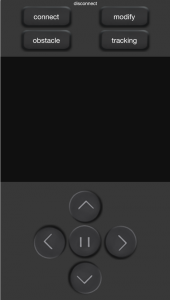
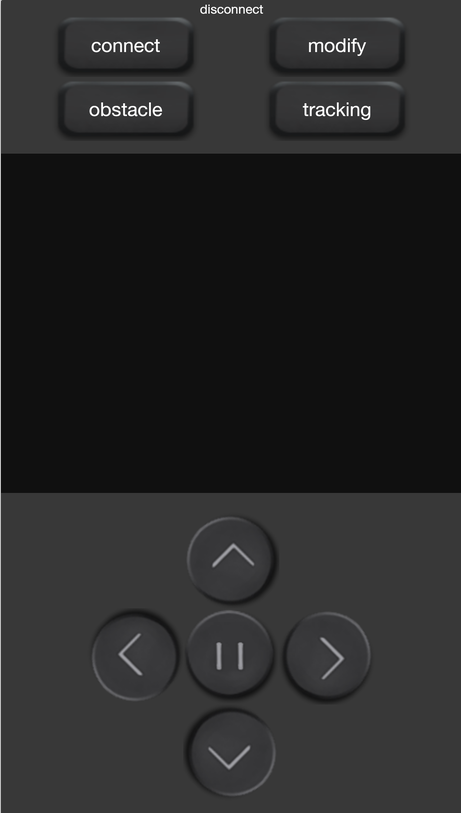
The smart car has three work modes: manual mode, tracing mode and obstacle avoidance mode, you can switch the mode freely.
1) manual mode: control the car to move by manual, press (^) button to make car go forward、(V)to go backward、(<)to turn left、(>)to turn right and (||)to stop, click”obstacle” button, switch the work mode to obstacle avoidance mode; click “tracking “butthon, the car will go to tracking work mode
2) Click “tracking” button, the car will move along with the black line, for more information please refer to Lesson 4
https://osoyoo.com/2017/05/11/%e6%99%ba%e8%83%bd%e5%b0%8f%e8%bd%a6%e5%ad%a6%e4%b9%a0%e7%ac%ac%e5%9b%9b%e8%af%be%ef%bc%9a%e5%b0%8f%e8%bd%a6%e9%bb%91%e7%99%bd%e5%be%aa%e8%bf%b9/
when you click any button of(^)、(V)、(<)、(>) and(||)you will switch to manual mode, click “obstacle” the work mode will switch to obstacle mode.
3)Click “tracking” button, the car will move along with the black line, for more information please refer to Lesson 3
OSOYOO Robot Car Starter Kit Lesson 3: Obstacle Avoidance Robot Car