Overview
We have developed an APP for Android users that simplifies the control of the OSOYOO 2WD Balance Car Robot. We can connect the smart phone with the robot via Bluetooth, and control the robot by the Balace Car APP to drive around, rotate, debug the pid, measure the speed and so on.
Bluetooth Connection
1. Follow the OSOYOO 2WD Balance Car Robot Introduction to build the robot and upload the code.(If you have finished, please ignore this step.)
2. Turn on the robot and ensure that the power supply of bluetooth module is normal.(The control switch of the Bluetooth module is opened and the on-board LED keeps flickering)
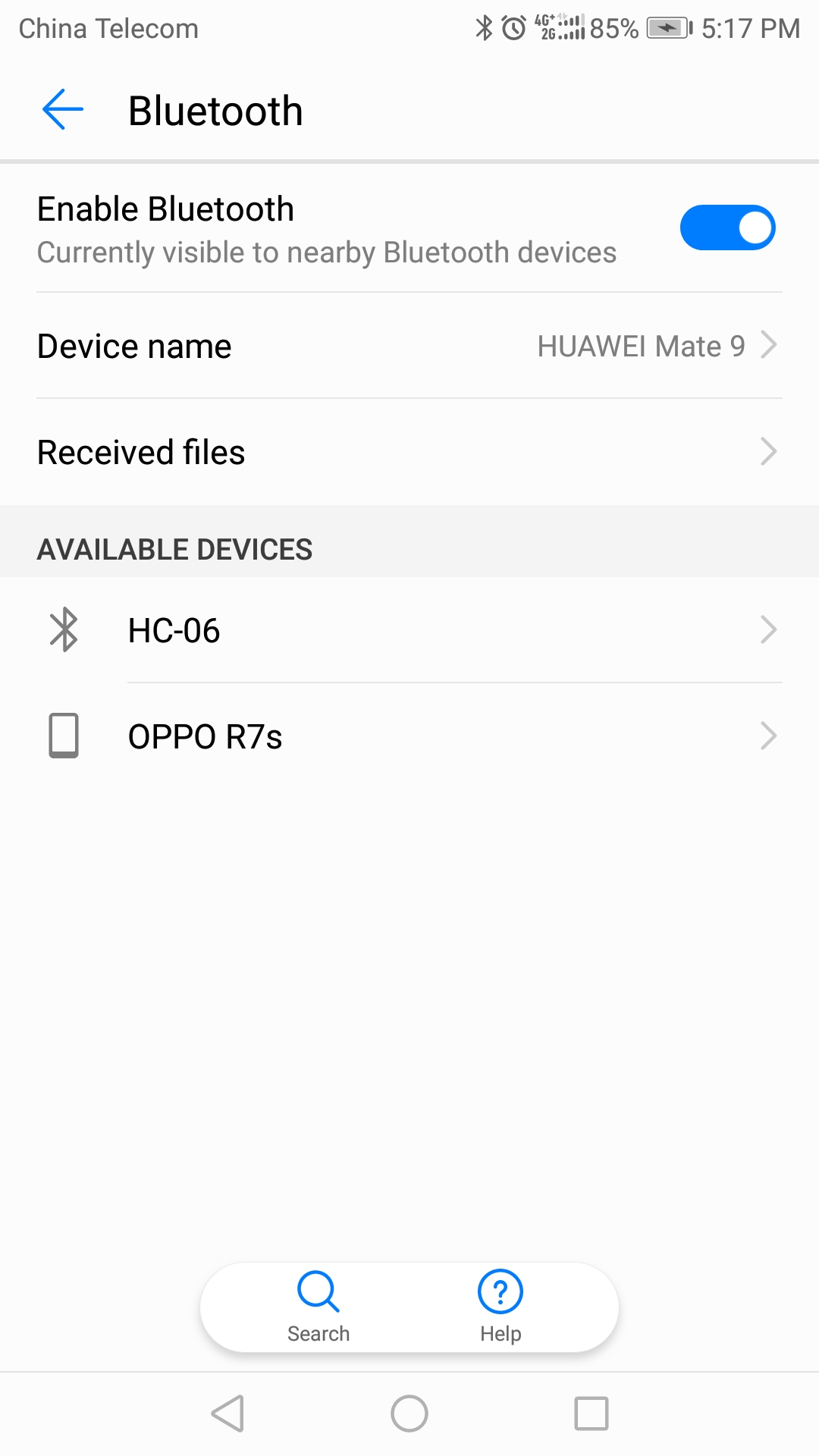
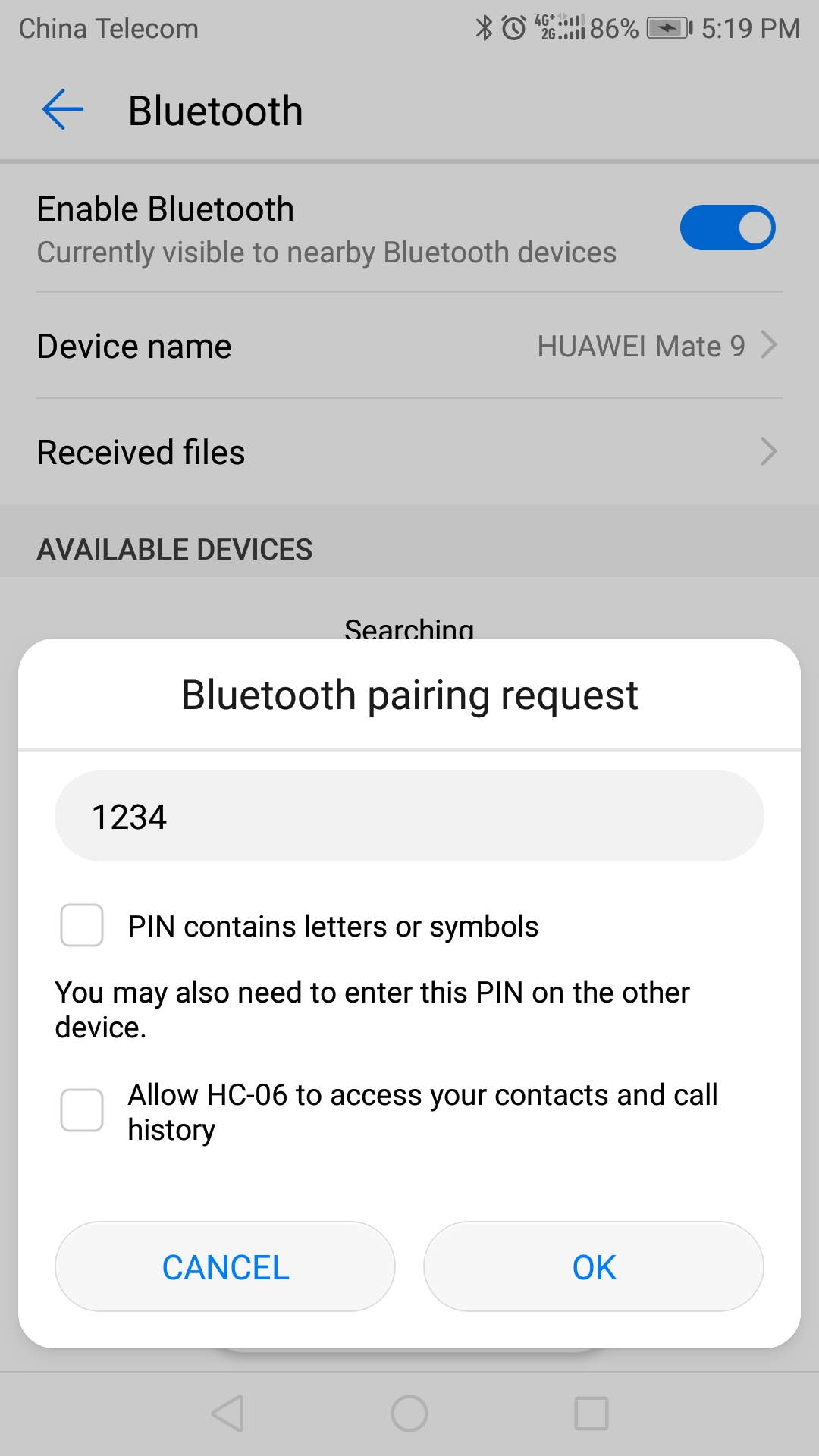
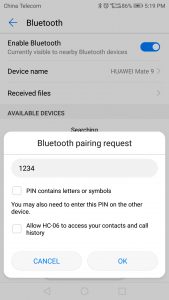
3. Android smartphone side: [Settings] — [Bluetooth], find a bluetooth called “HC-06″,click it and enter the default password”1234” to connect with this Bluetooth.(Only available for Android)

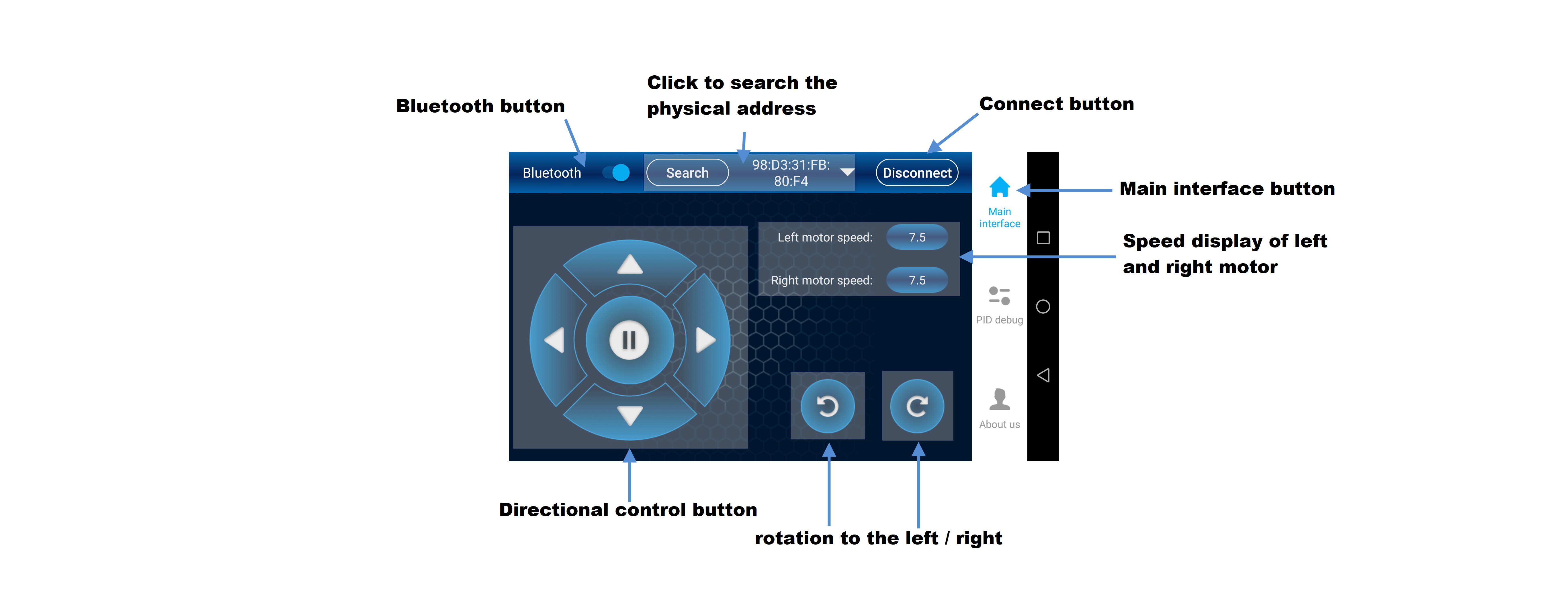
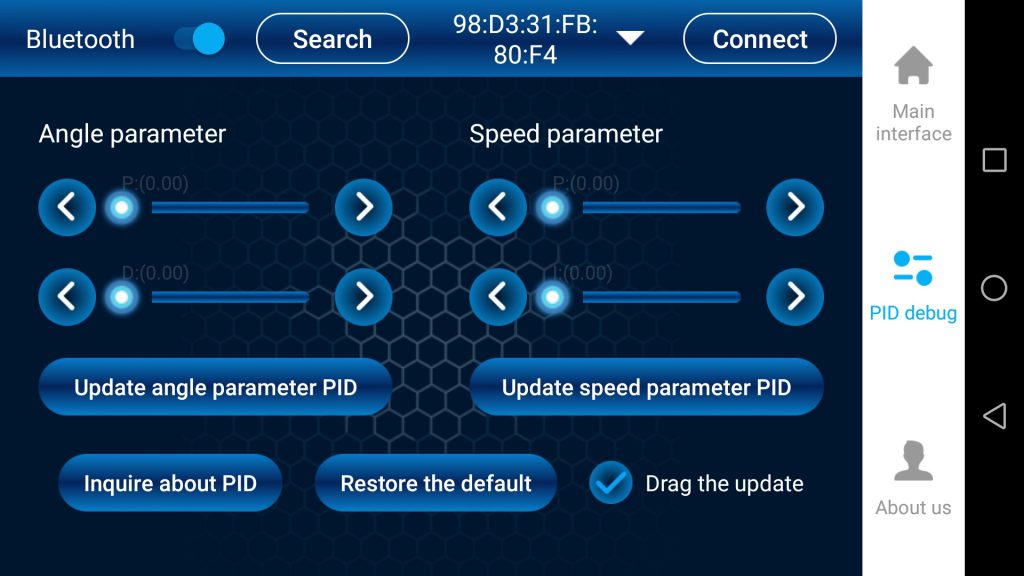
4. Open the OSOYOO Balance Car app and you can see as below.If the phone does not turn on the Bluetooth function, the button next to the Bluetooth switch displays will show the dark. Click to turn it on.

5. Click “Search” to search the physical address of the bluetooth module.

6. Choose the corresponding physical address for the bluetooth and click the “Connect” button.

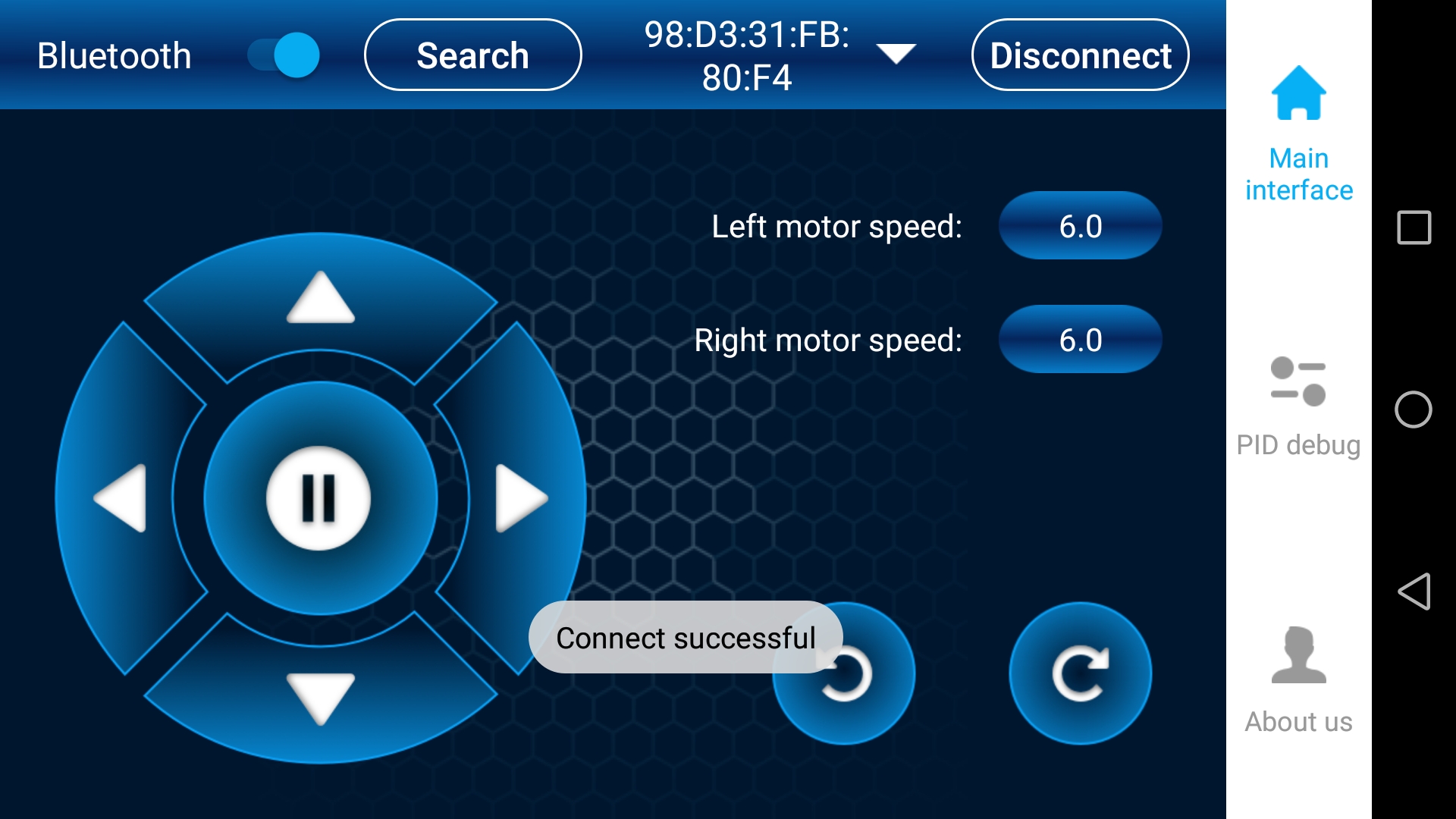
7. If the Bluetooth connection is successful, a prompt will appear. If the connection fails, please reconnect from the first step.

Interface Introduction
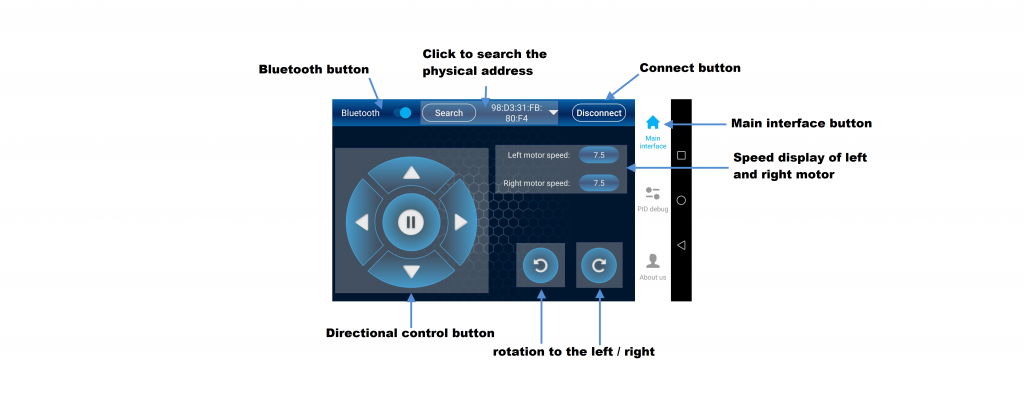
Maine Interface
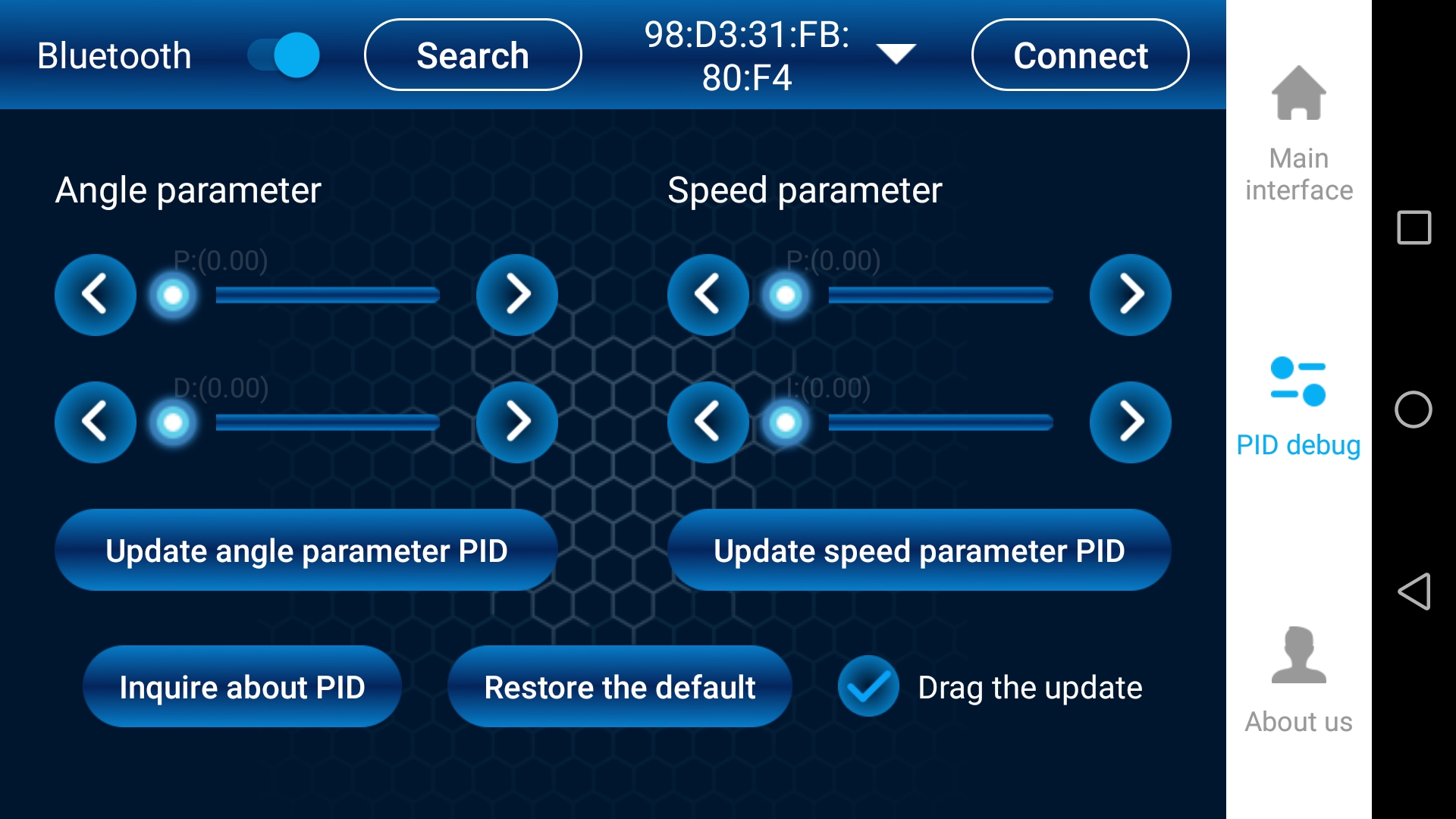
PID Debug Interface
- Before adjusting PID parameters, you need to click “Inquire about PID”.
- When “Drag the update” is not checked, after dragging and adjusting the PID parameter, you need to click the corresponding “Update angle parameter PID” or “Update speed parameter PID” to update the data.
- When”Drag the update” has been checked, the data will be update automatically.
- If the PID parameters adjustment fails, click “Restore the default” to restore the default settings.
About us
You can see some information about us as below.