VIDEO
公式ストア:
目標
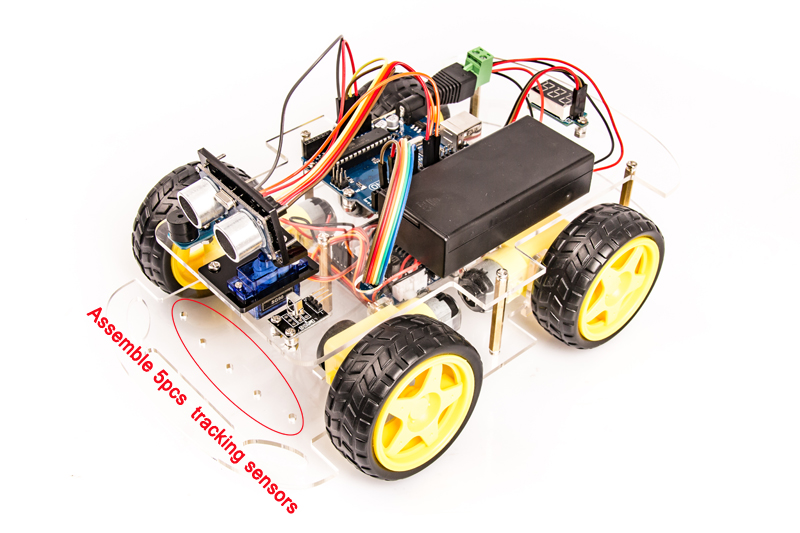
本文は第1課の内容を基づいて、5つの黒/白トラッキングセンサ追加します。もし、第1課の装着など完了していない場合、必ず第1課の内容をご参照して、装着して下さい。https://osoyoo.com/ja/?p=4906
このレッスンでのソフトウェアは、これらの5つの黒/白トラッキングセンサーからのデータを読み取って、ロボットカーが白い地面の黒いトラック線に沿って自動的に走行します。
必要なパーツ:
必要なネジ
M3*10 ネジ x5
M3*5 ネジx5
M3*5 ネジx5
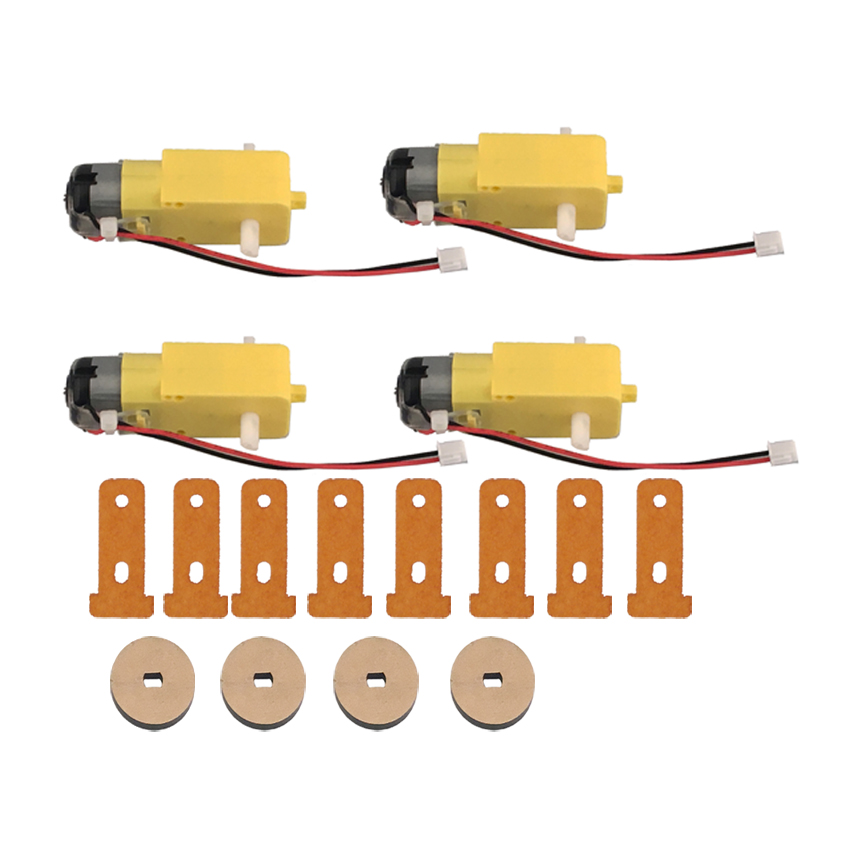
歯車モータ ワイヤー付き
(歯車モーター固定用アクリル板 x8
速度エンコーダ x4)
M3*30 ネジx8
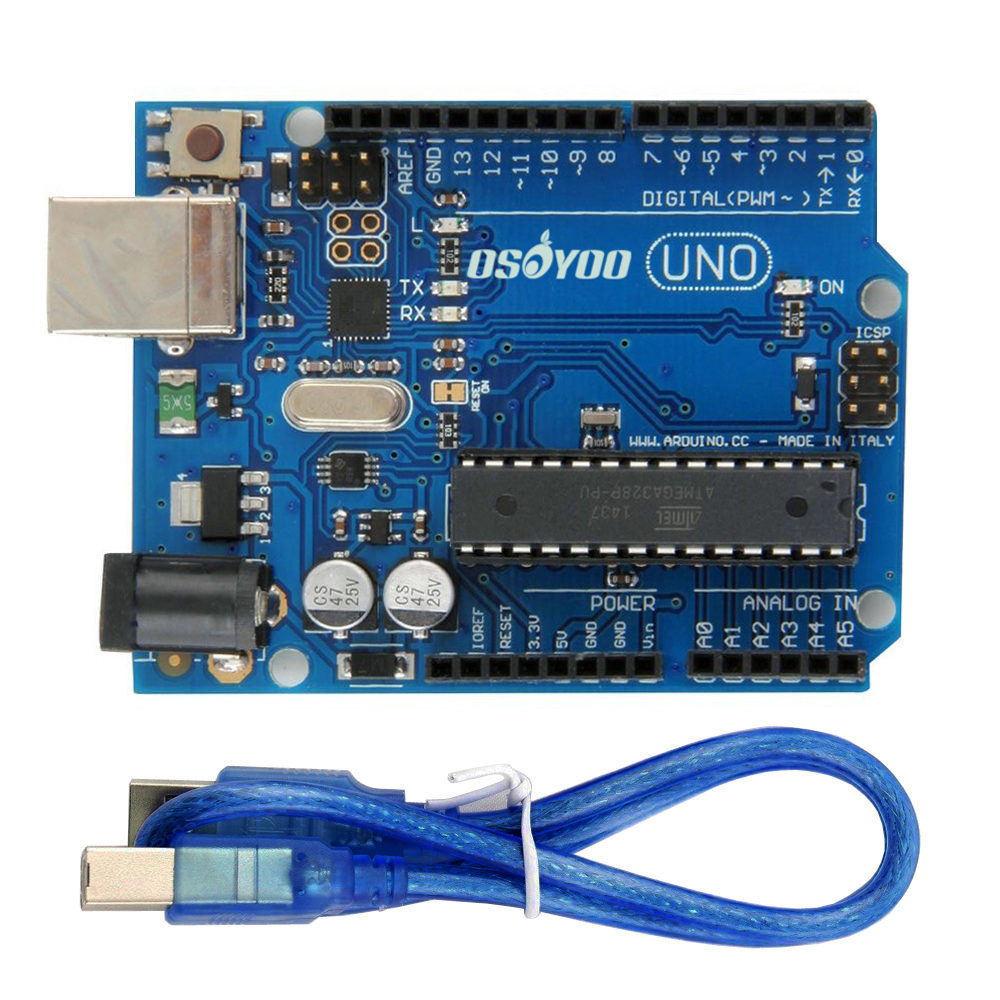
OSOYOO UNO R3ボード USBケーブル付き
M3*10 ネジx4
M3*10 ネジx4
18650 3.7V 電池ボックス(電池は付いていません)
M3*10 ネジx4
M3*10 ネジx2
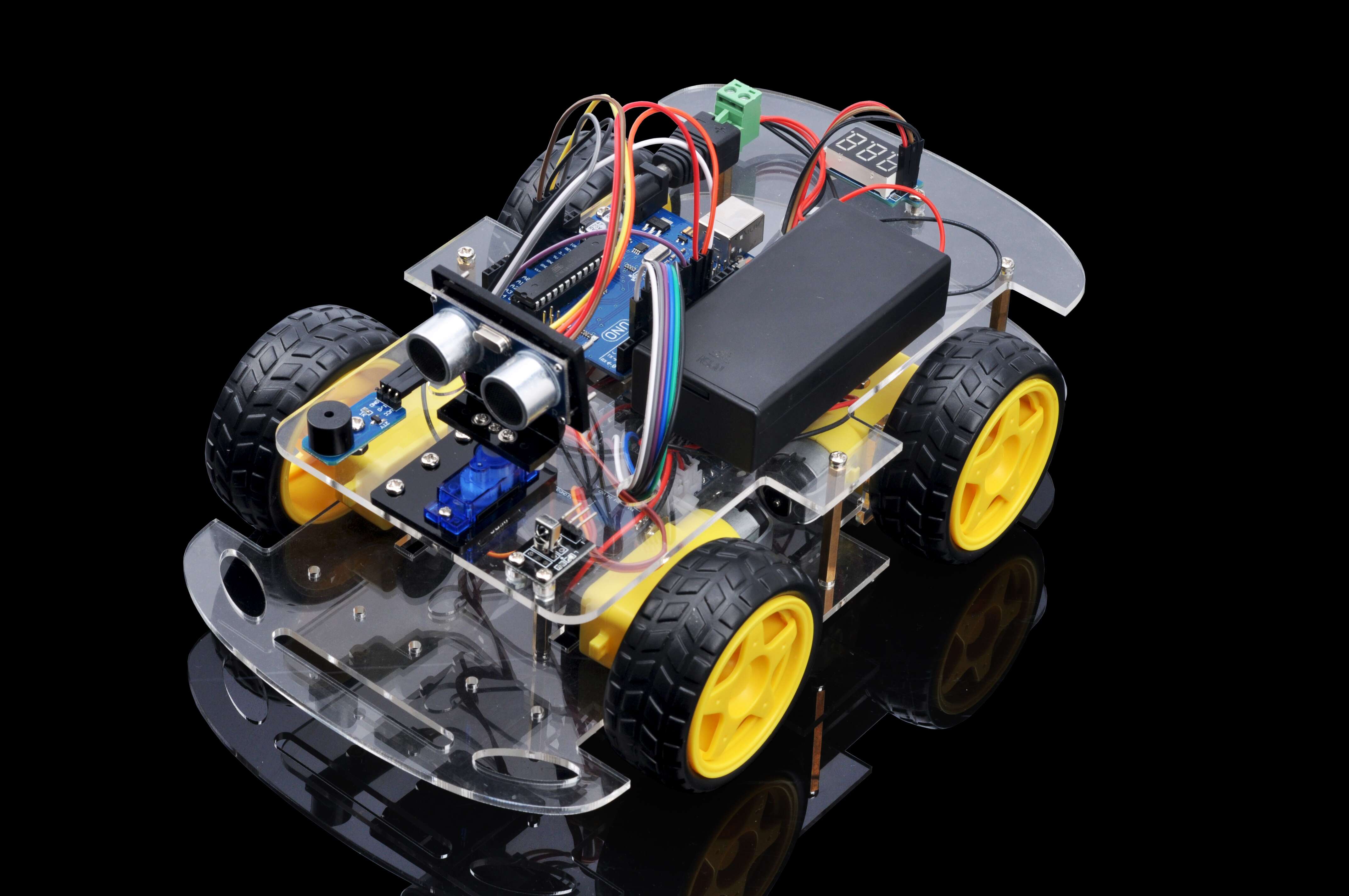
ハードウェアの装着:
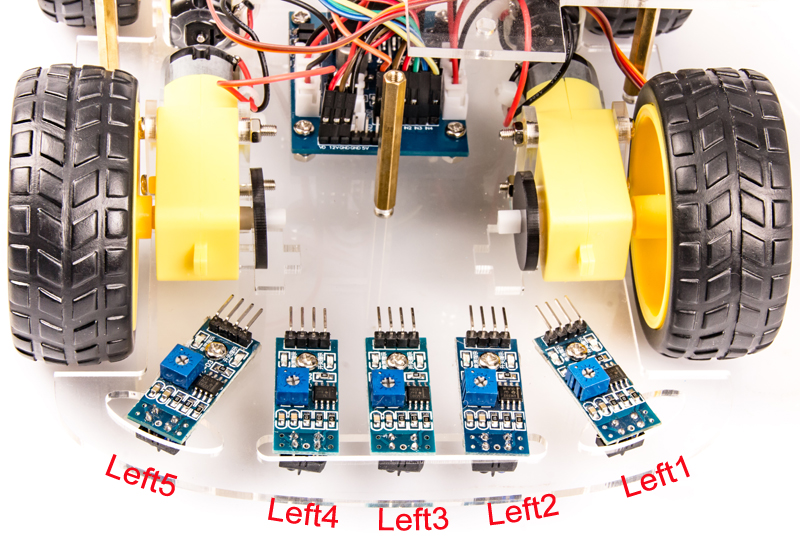
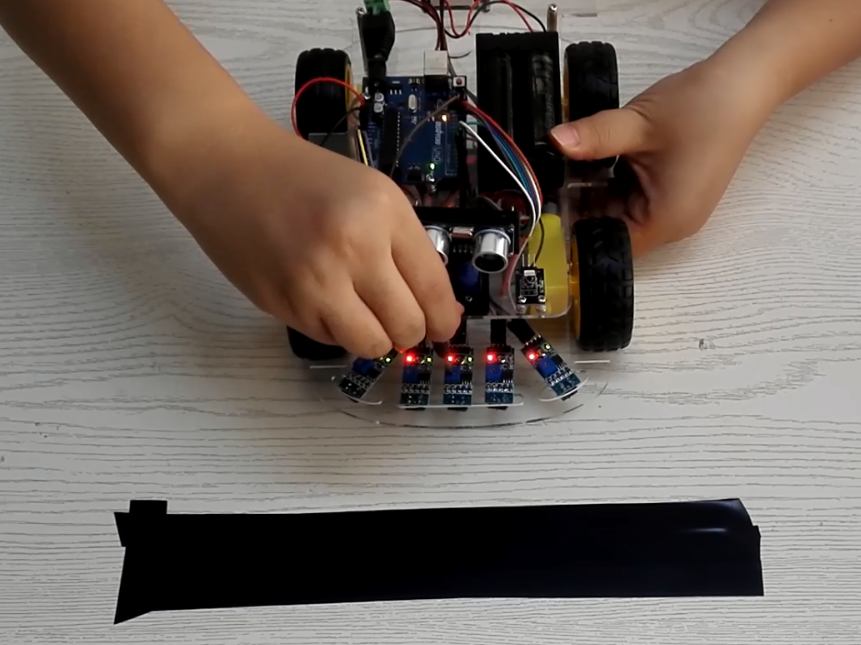
1) 第1課 、第2課 、第3課 の内容をご参照して、組み立てください。下部シャーシの頭に5つのトラッキングセンサを固定して下さい。
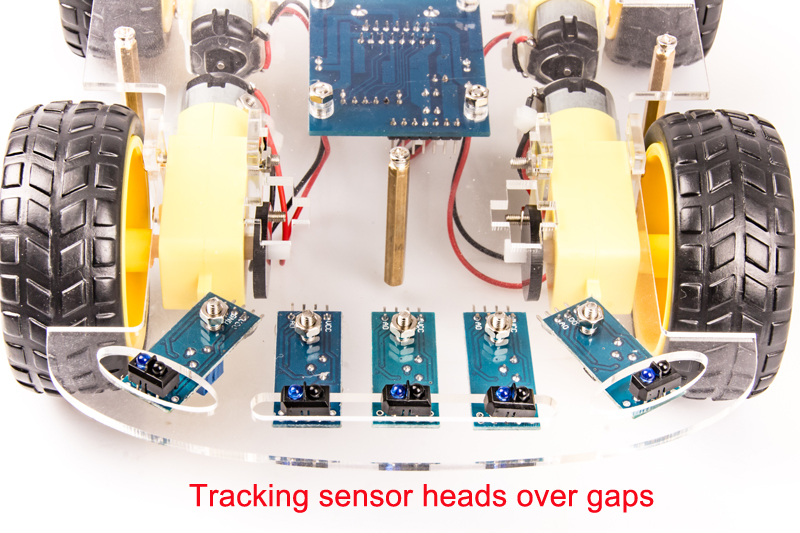
2)5つのM3*10ネジとM3ナッツを使って、 5つのトラッキングセンサを下部シャーシの頭に固定して下さい。センサの探知部が必ず下部シャーシ頭の穴に露出して下さい。
3) 左から右へ, トラッキングセンサーモジュールのD0とUNOボードのD3, A1, A2, A3, D10 を接続して下さい。以前の課程に接続済みの回線を外しないてください。1pin オス~5pinメスジャンプ線の5つのピンを使って、5つのトラッキングモジュールのVCCピンを接続して、もう1本の1pin オス~5pinメスジャンプ線の5つのピンを使って、 5つのトラッキングモジュールのGNDピンを接続して、最初の1pin オス~5pinメスジャンプ線の1pinとUNOボードのVCCを接続して、もう1本の1pin オス~5pinメスジャンプ線の1PINとUNOボードのGNDを接続してください。
ソフトウェアのインストール:
Step 1:
パソコンに Arduino IDE というソフトウエアをインストールして下さい。ダウンロードリンク: https://www.arduino.cc/en/Main/Software?setlang=en , then install the software.
Step 2:
次のリンクで第4課のライントラッキングのロボットカーサンプルコードをダウンロードして下さい。 https://osoyoo.com/driver/smartcar-lesson4.zip ダウンロードしたのzipファイルを解凍したら、 smartcar-lesson4というフォルダがあります。
Step 3:
USBケーブルを使って、Arduino UNO R3ボードとパソコンを繋ぎ、 Arduino IDEの file -> Open に入って、先ほど解凍したのsmartcar-lesson4 フォルダに「smartcar-lesson4.ino」 を選択して、コードをArduino IDEにロードします。
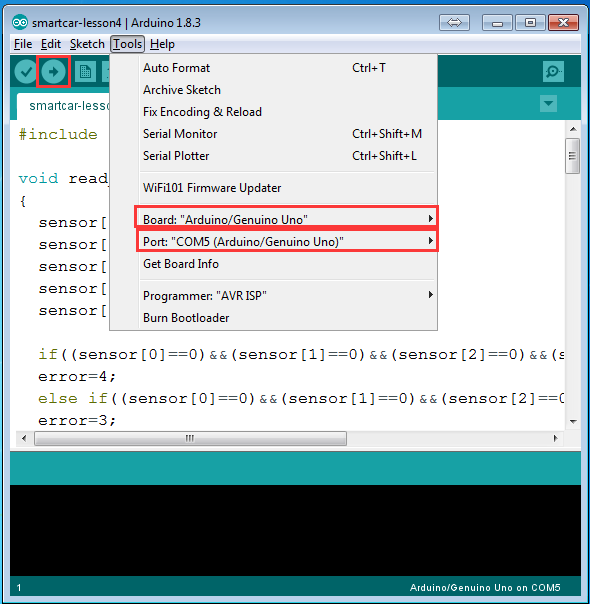
Step 4:
Arduino IDEのToolsにボードタイプ「Arduino/Genuino UNO」とポート番号を選択して、コードをR3ボードにアップロードしてください。
Step 5:
トラッキングセンサーモジュールの感度を調整します。
テスト:
白い地面に黒いトラック線(黒いトラック線の幅が20mm以上30mm未満)を用意して、 トラック線の曲がり角度は90度を超えように。 角度が大きすぎると、車はトラック線から外れます。
車の電源を入れ、センサーモジュールの真ん中を黒いトラックの線に置くと、車は黒いトラック線に沿って動きます。


























The steps from the previous lesson have wires the get connected into UNO board GND and other slots and now it says to connect wires to the same place again… What should I do? Please reply Asap i need to finish it by thursday
Also, can we not use the Line tracking and obstacle avoidance at the same time?!!!
You can follow our lesson 5 to change the working mode between Line tracking and obstacle avoidance:
https://osoyoo.com/2017/05/14/wifi-control-smart-car/
One of my sensors has a bad LED. I can run test and view serial monitor to see when sensor is seeing black or white, and adjust for proper sensitivity, but the LED never lights up. Is it possible to get a replacement sensor? [email protected]