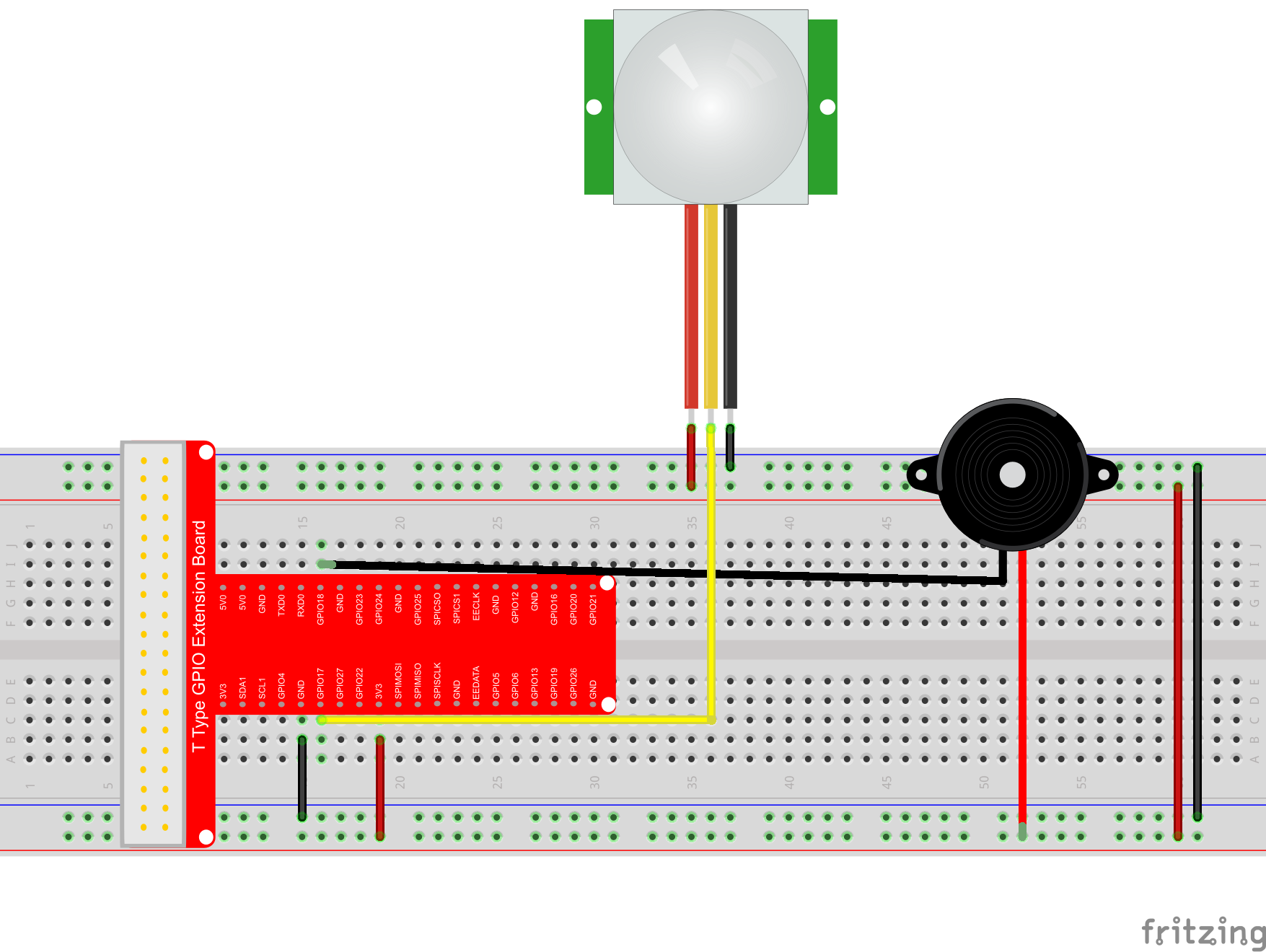
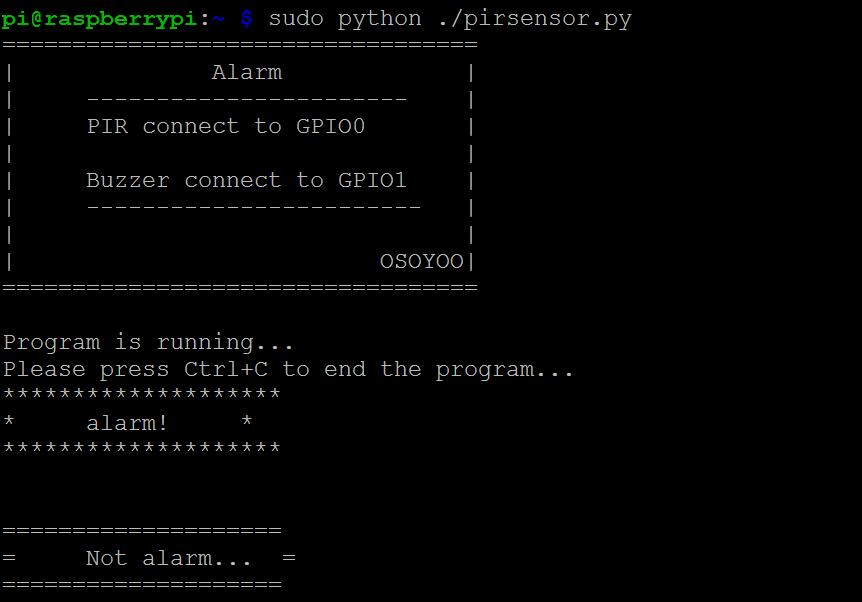
プログラムが実行を開始すると、ターミナルにプリントメッセージが表示されます。Raspberry PI PIRセンサーの前に移動すると、パイゾブザーが鳴動するはずです。離れると、ブザーの鳴動が停止します。
Pythonサンプルコード解析:
import RPi.GPIO as GPIO
import time
# set BCM_GPIO 17(wPi#0) as PIR pin
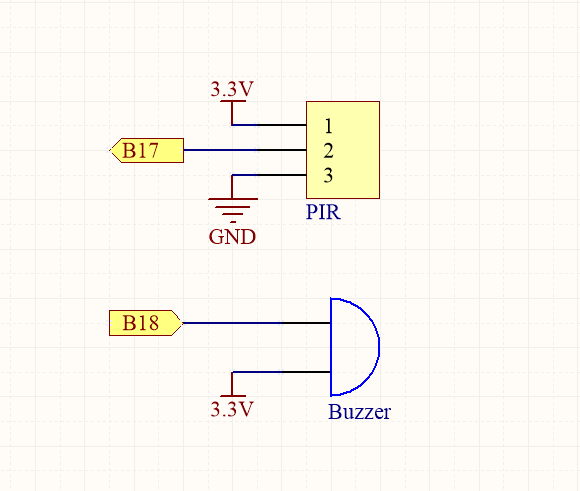
PIRPin = 17
# set BCM_GPIO 18(wPi#1) as buzzer pin
BuzzerPin = 18
#print message at the begining ---custom function
def print_message():
print ('==================================')
print ('| Alarm |')
print ('| ----------------------- |')
print ('| PIR connect to GPIO0 |')
print ('| |')
print ('| Buzzer connect to GPIO1 |')
print ('| ------------------------ |')
print ('| |')
print ('| OSOYOO|')
print ('==================================\n')
print ('Program is running...')
print ('Please press Ctrl+C to end the program...')
#setup function for some setup---custom function
def setup():
GPIO.setwarnings(False)
#set the gpio modes to BCM numbering
GPIO.setmode(GPIO.BCM)
#set BuzzerPin's mode to output,and initial level to HIGH(3.3V)
GPIO.setup(BuzzerPin,GPIO.OUT,initial=GPIO.HIGH)
GPIO.setup(PIRPin,GPIO.IN)
#main function
def main():
#print info
print_message()
while True:
#read Sw520dPin's level
if(GPIO.input(PIRPin)!=0):
GPIO.output(BuzzerPin,GPIO.LOW)
#time.sleep(0.5)
print ('********************')
print ('* alarm! *')
print ('********************')
print ('\n')
time.sleep(1)
else:
GPIO.output(BuzzerPin,GPIO.HIGH)
print ('====================')
print ('= Not alarm... =')
print ('====================')
print ('\n')
time.sleep(1)
#define a destroy function for clean up everything after the script finished
def destroy():
#turn off buzzer
GPIO.output(BuzzerPin,GPIO.HIGH)
#release resource
GPIO.cleanup()
#
# if run this script directly ,do:
if __name__ == '__main__':
setup()
try:
main()
#when 'Ctrl+C' is pressed,child program destroy() will be executed.
except KeyboardInterrupt:
destroy()
pass
Hi, I’m a newbie to raspberry pi. I’m having difficulty with lesson 16. The buzzer is always on when I run the program. Everything is wired correctly. Can anyone advise how to test to see what’s wrong?
Hi, Please turn sensitivity adjustment and time delay adjustment of IR motion sensor according to the instruction. what’s more, the sensor will be affected by environment(such as sunshine, wind and so on)












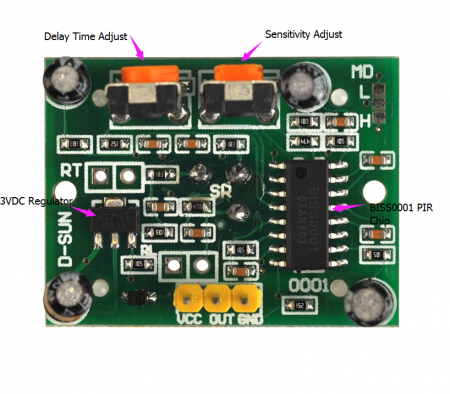
The operating voltage of this PIR motion sensor is 5V to 20V. Better connect the VCC pin to 5V.
Hi, I’m a newbie to raspberry pi. I’m having difficulty with lesson 16. The buzzer is always on when I run the program. Everything is wired correctly. Can anyone advise how to test to see what’s wrong?
Hi, Please turn sensitivity adjustment and time delay adjustment of IR motion sensor according to the instruction. what’s more, the sensor will be affected by environment(such as sunshine, wind and so on)
Hi Elaine, I moved the VCC connection to 5v as suggested by amiya. Works perfectly now 🙂