注意:すべてのOSOYOO ARDUINO用製品はサードパーティー製品であり、ARDUINOと完全に互換性があります
認可されたオンライン小売業者:
内容
- 紹介
- 準備
- 接続
- スケッチのアップロード
- プログラムの実行結果
紹介
この例では、アナログ入力0のポテンショメータ(または他のセンサー)を使用して、Stepper Libraryを使用してステッピングモーターの回転速度を制御しています。ステッパーは、デジタルピン8、9、10、11で制御されます。
準備するもの
ハードウェア
ソフトウエア
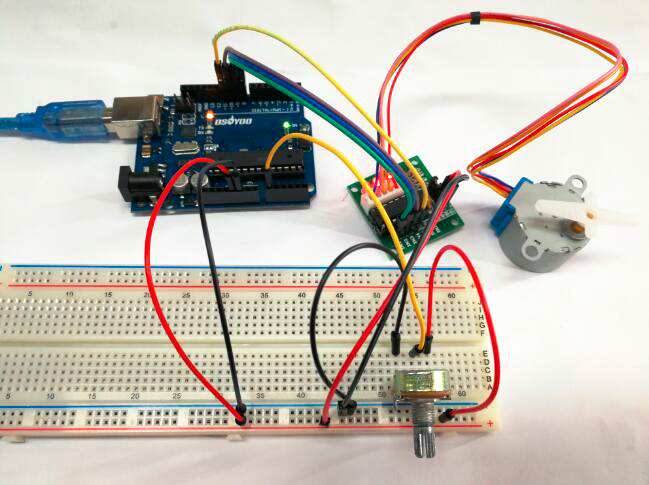
接続
以下のように回路を組みます:
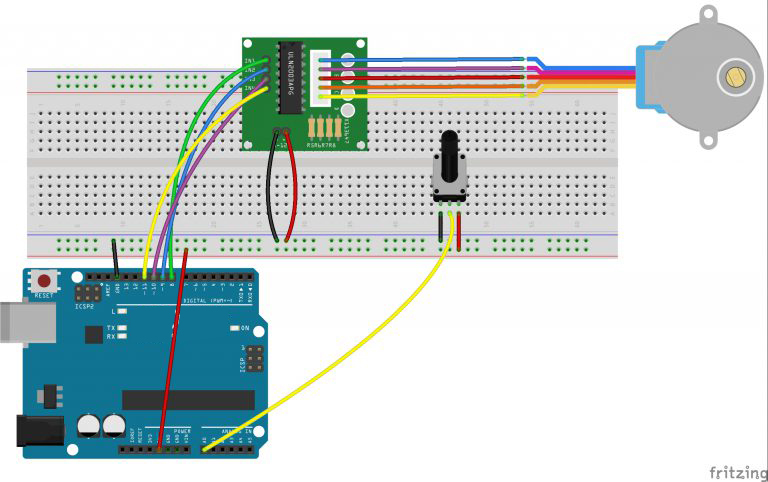
このステップでは、10kポットを電源とグランドに接続し、ワイパーをアナログピン0に出力します。
スケッチをアップロードする
上記の操作が完了したら、USBケーブルでボードとコンピュータを接続します。緑色の電源LED(PWRと表示)が点灯しているはずです。
コード・プログラム
以下のコード例をプログラムにコピーしてください。
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
int stepCount = 0; // number of steps the motor has taken
void setup() {
// nothing to do inside the setup
}
void loop() {
// read the sensor value:
int sensorReading = analogRead(A0);
// map it to a range from 0 to 100:
int motorSpeed = map(sensorReading, 0, 1023, 0, 100);
// set the motor speed:
if (motorSpeed > 0) {
myStepper.setSpeed(motorSpeed);
// step 1/100 of a revolution:
myStepper.step(stepsPerRevolution / 100);
}
}
コンパイルしてアップロードする
Arduino IDEを開き、ボードタイプ、ポートタイプに対応するものを選択します。
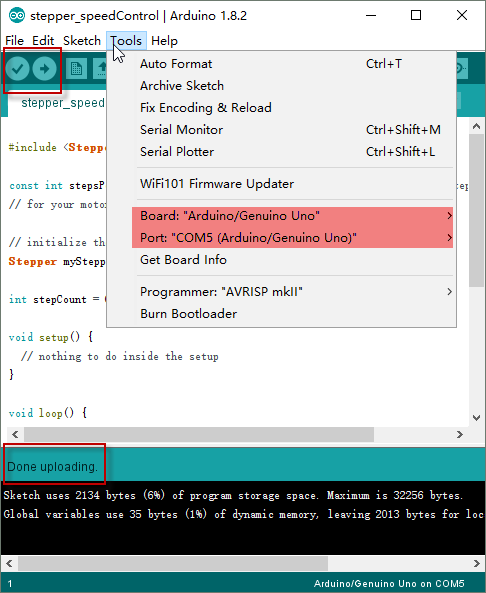
このスケッチをコンパイルしたら、環境内の「Upload」ボタンをクリックするだけです。数秒待つと、ボードのRXとTXのLEDが点滅しているのが見えるはずです。アップロードが成功すると、ステータスバーに “Done uploading. “というメッセージが表示されます。
実行結果
アップロードが終了して数秒後にポテンショメーターのつまみを回すと、モーターが時計方向に回転します。ポテンショメーターの値が高いほど、モーターの回転数は速くなります。setSpeed()はステップ間の遅延を設定するため、低速ではセンサーの値の変化に対してモーターの反応が鈍くなることに気づくかもしれません。












why is it the stepper motor stops when the pot gets to approx. 50%?