内容
認定オンライン小売業者
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
 |
 |
 |
 |
 |
 |
目的
OSOYOO 2WDロボットカー スターターキットのレッスンへようこそ!
このレッスンでは、ロボットカーを作動させるのに最も重要な基本プログラムをインストールしていきます。インストールが完了したらプログラム内容に沿って車が自動で走行した場合、Arduino、モーターコントロールモジュール、モーター、バッテリー、シャーシの接続がちゃんと接続されていることを示します。
今後のレッスンは、全てこのレッスン1のプログラム内容に基づいて進めていきますので、このレッスンの作動テストは非常に重要になってきます。 
部品とデバイス

ハードウェアの設置
シャーシから保護フィルムをはがします。
注意してはがしてください。
シャーシは前面と背面がありますので、写真を参考に注意して組み立ててください。


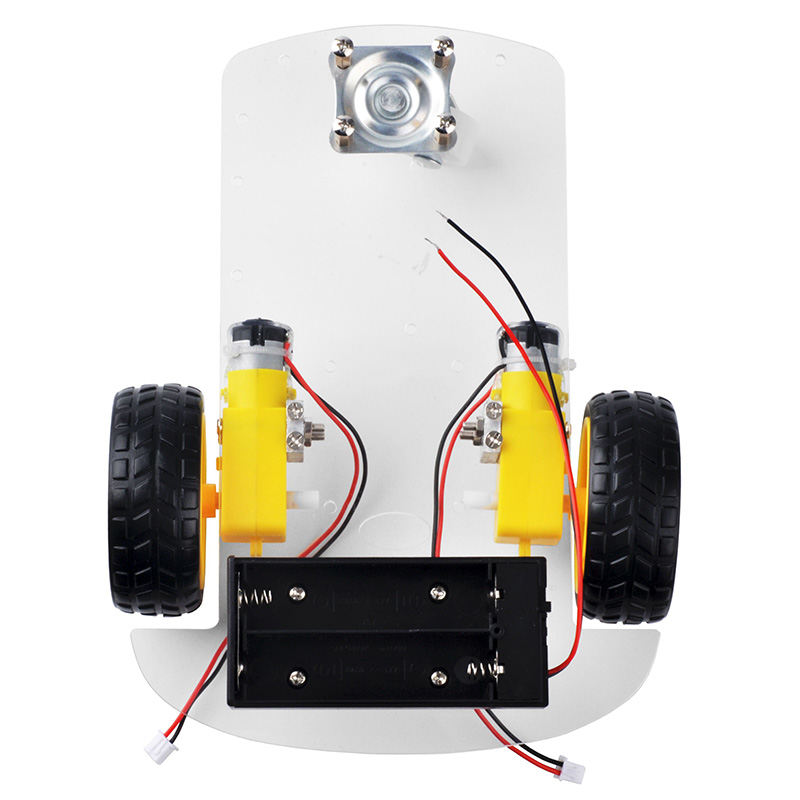
1 モーターをシャーシに設置
付属品:
モーターホルダーと一緒に2つのモーターをシャーシに取り付けます。

2 ユニバーサルホイールとホイールをシャーシに設置
付属品:
M3×10ダブルパス銅柱とM3×5ネジを使用してシャーシにホイールを取り付け(最初にシャーシに銅柱を取り付けてください)、次に2つのホイールをモーターに取り付けます。


3 バッテリーボックスをシャーシに設置
付属品:
M3のネジとナットでシャーシの表面に電池ボックスを固定します。バッテリーは含まれていません。
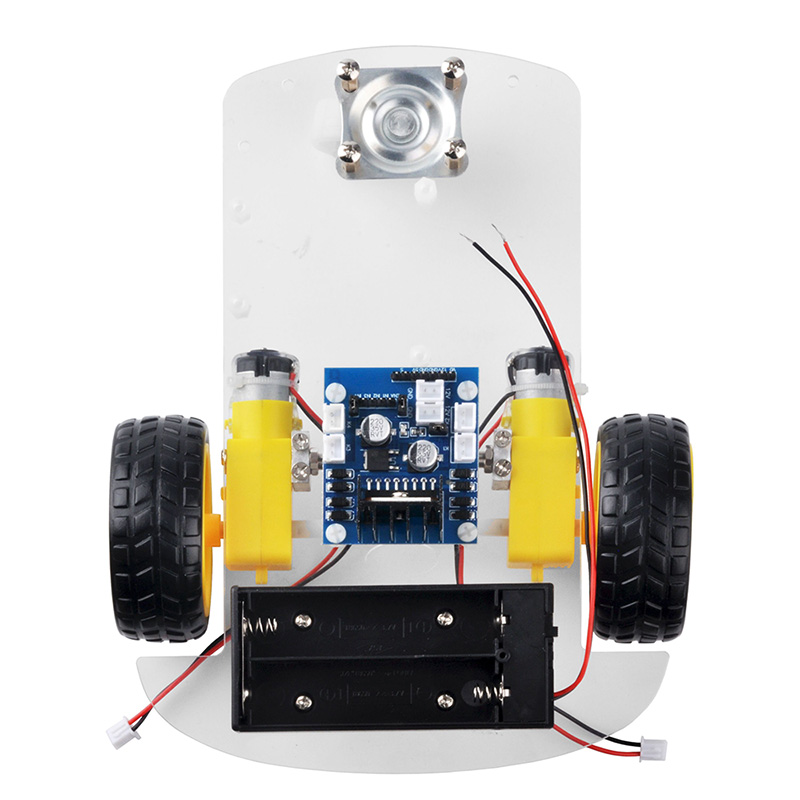
4 OSOYOO MODEL -Xモータードライバーモジュールをシャーシに設置
付属品:
- M3×6樹脂ねじ×4
- M3プラスチックナット×4
- M3×5 + 6プラスチックスペーサー×4
OSOYOO Model-Xモータドライバモジュールをシャーシの表面にM3ネジとナットで固定します。
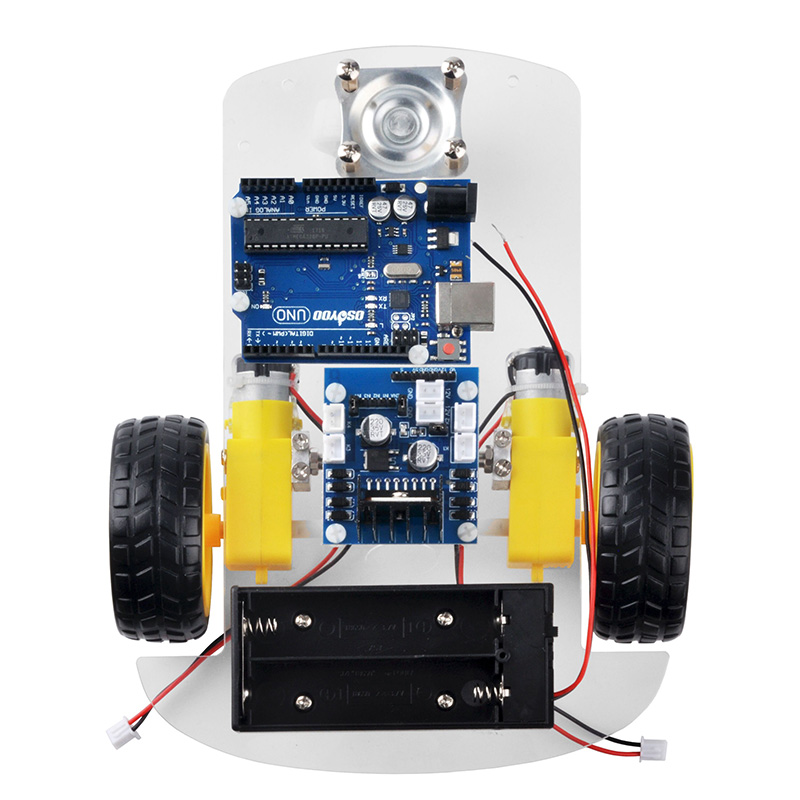
5 OSOYOO UNOをシャーシに設置
付属品:
- M3×6樹脂ねじ×3
- M3プラスチックナット×4
- M3×5 + 6プラスチックスペーサー×4
OSOYOO UNOボードをM3ネジとナットでシャーシの表面に固定します。
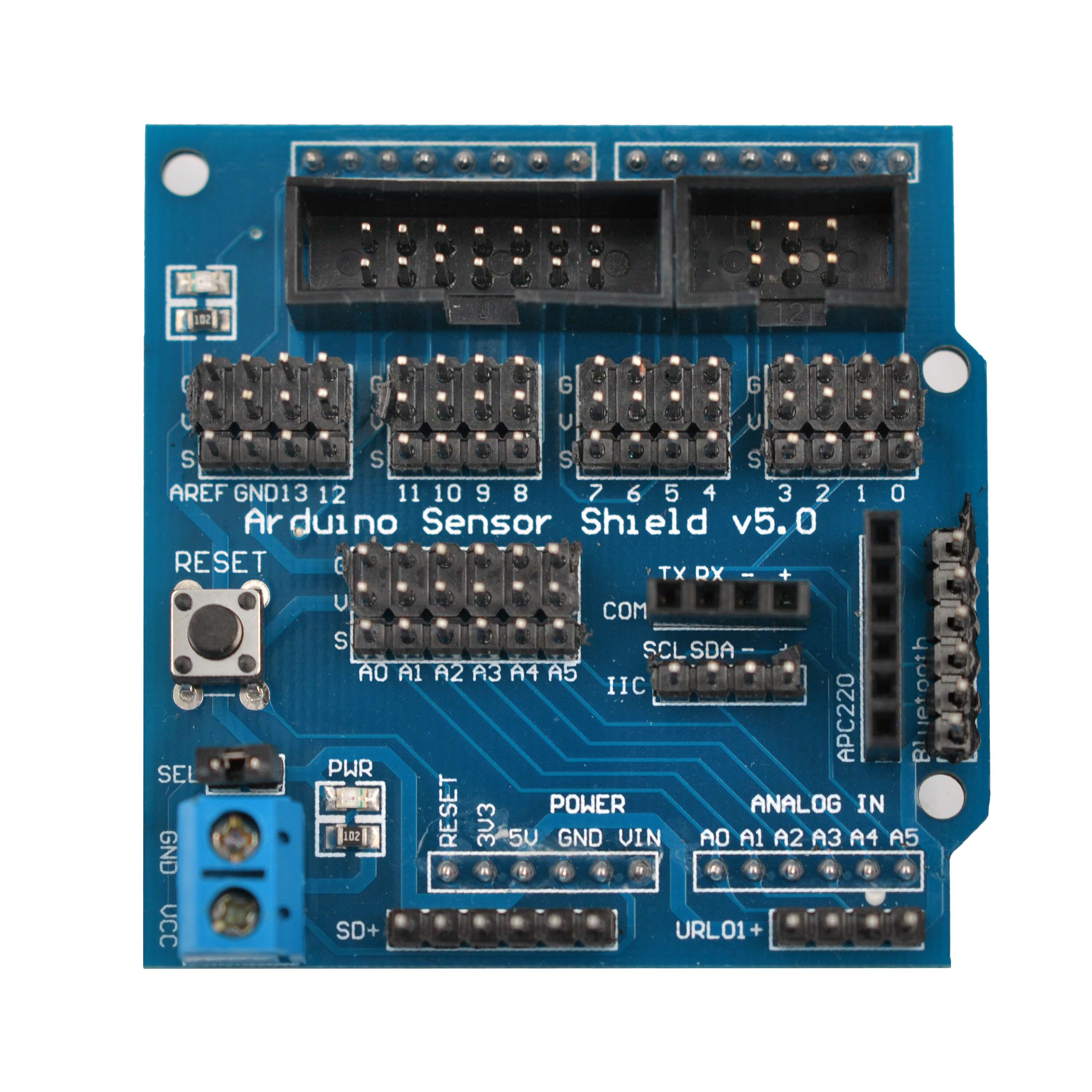
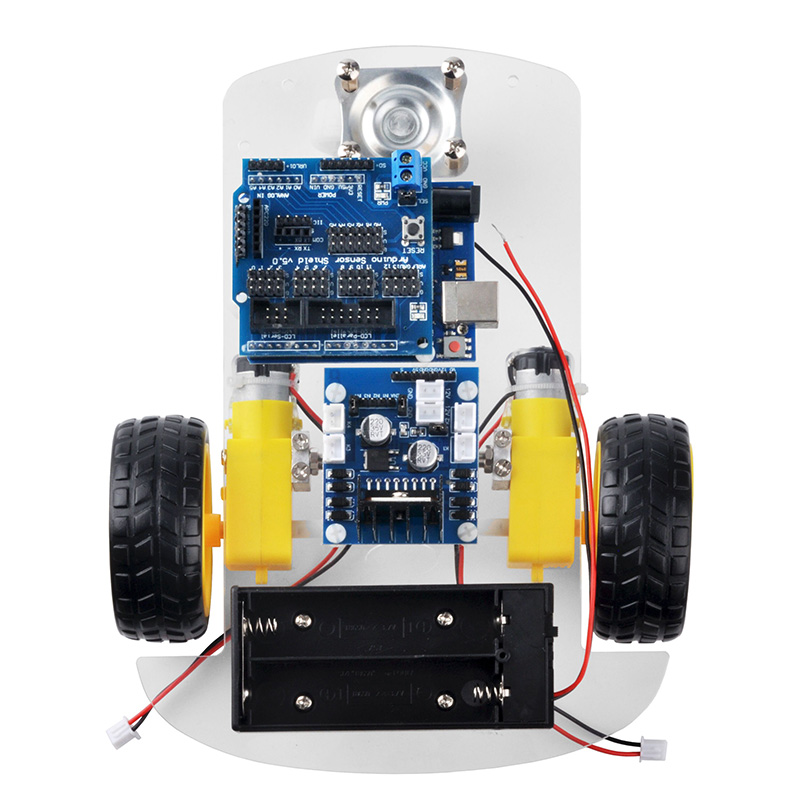
6 Arduino UNO用 センサーシールドV5.0をシャーシに設置
Arduino UNOの上部に、図が示すようにセンサーシールドを設置する。
7 配線作業
1)下記の接続図に従って、UNOボード、バッテリーボックス、およびOSOYOO Model-Xを接続します。
DC電源コネクタのプラスとマイナスは注意して接続してください。黒がマイナスで赤がプラスになります。
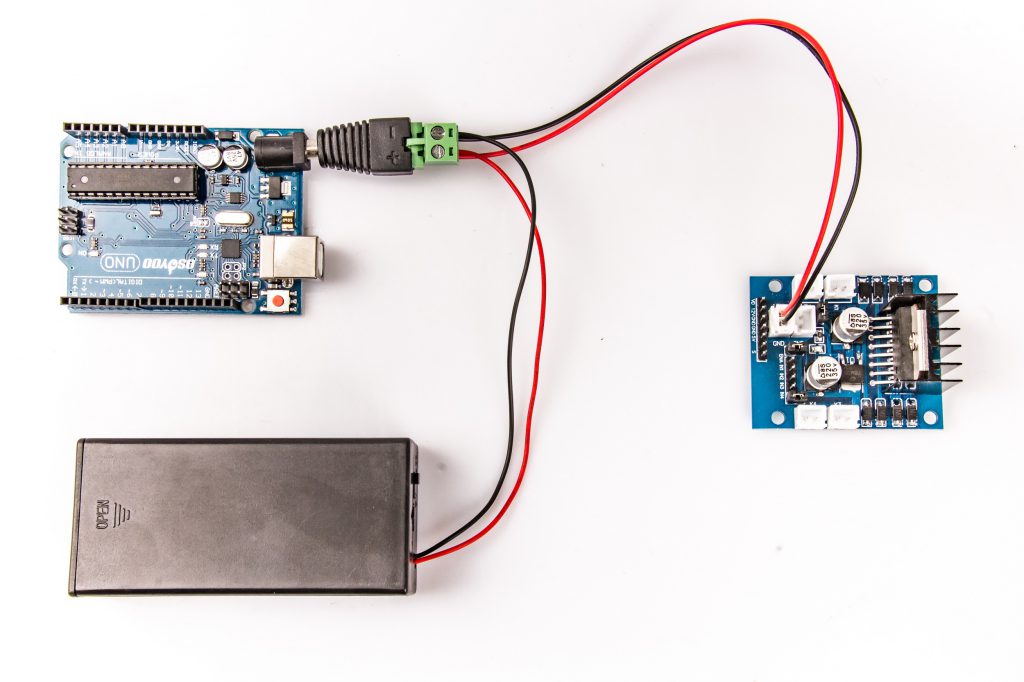
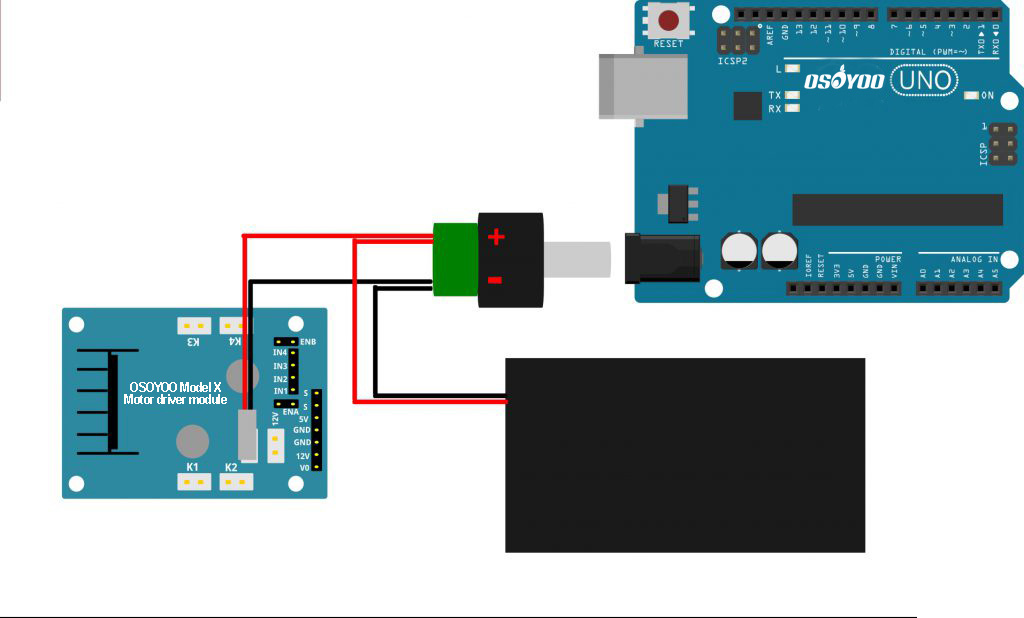
OSOYOO Model-Xの詳細については、下記リンクを参照してください。
https://osoyoo.com/2017/08/15/l298npro-motor-driver-module/
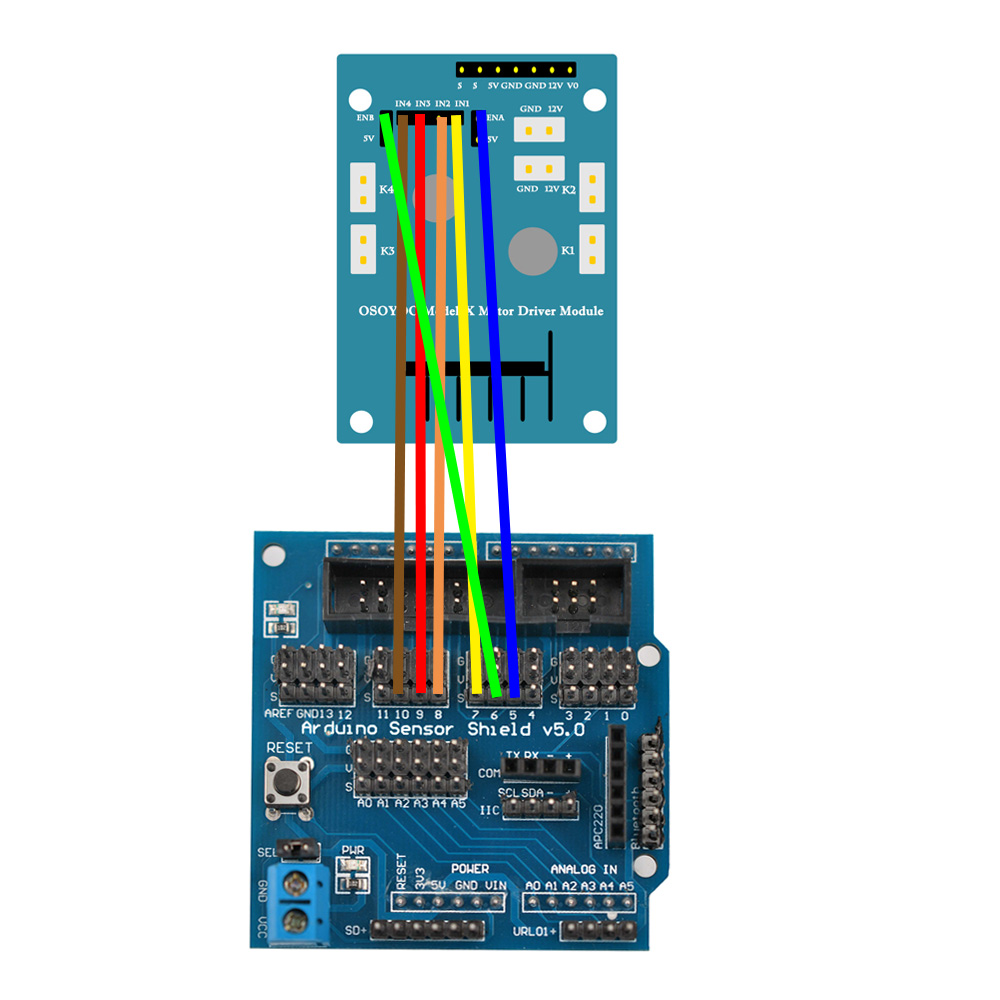
2) 以下の図が示すように、OSOYOO Model-XとArduino UNO用センサーシールドV5.0を接続します。
| Arduino UNO用センサーシールドV5.0 |
OSOYOO Model-X |
| S5 |
ENA |
| S6 |
ENB |
| S7 |
IN1 |
| S8 |
IN2 |
| S9 |
IN3 |
| S10 |
IN4 |
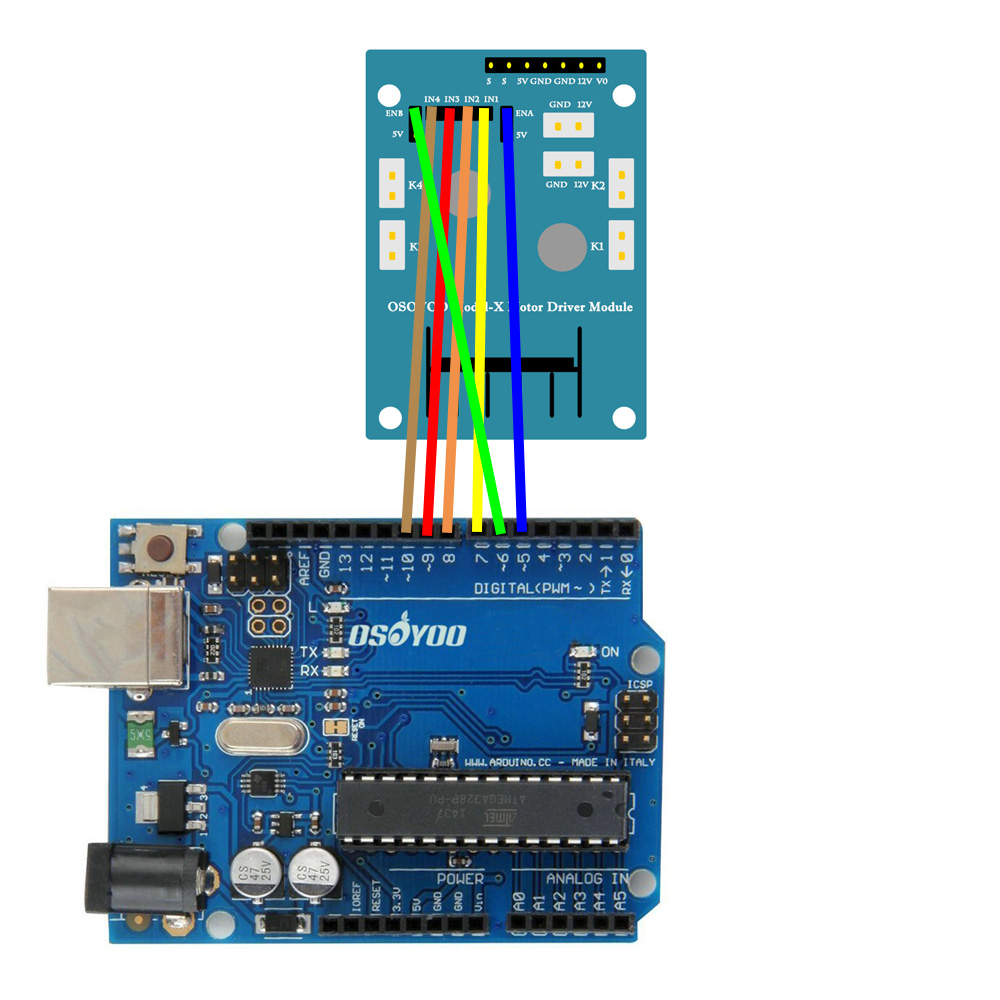
OSOYOO UNOとのみ接続したい場合は、次の図に従ってください。
| OSOYOO UNO |
OSOYOO Model-X |
| D5 |
ENA |
| D6 |
ENB |
| D7 |
IN1 |
| D8 |
IN2 |
| D9 |
IN3 |
| D10 |
IN4 |
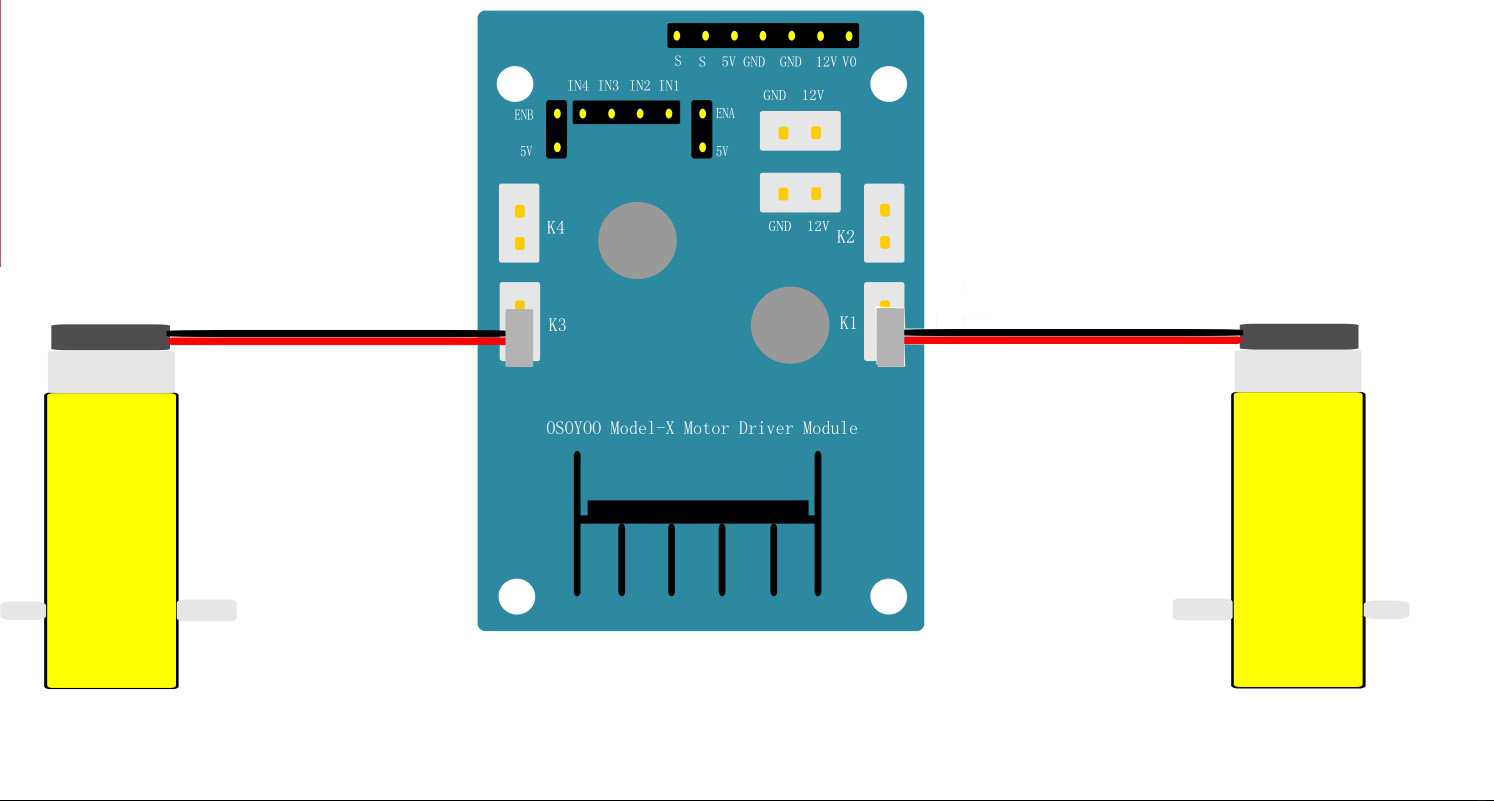
3)OSOYOO Model-Xモータードライバーモジュールと2つのモーターを接続します。
以下の図が示すように、右側のモーターをK1またはK2に接続し、左側のモーターをK3またはK4に接続します。
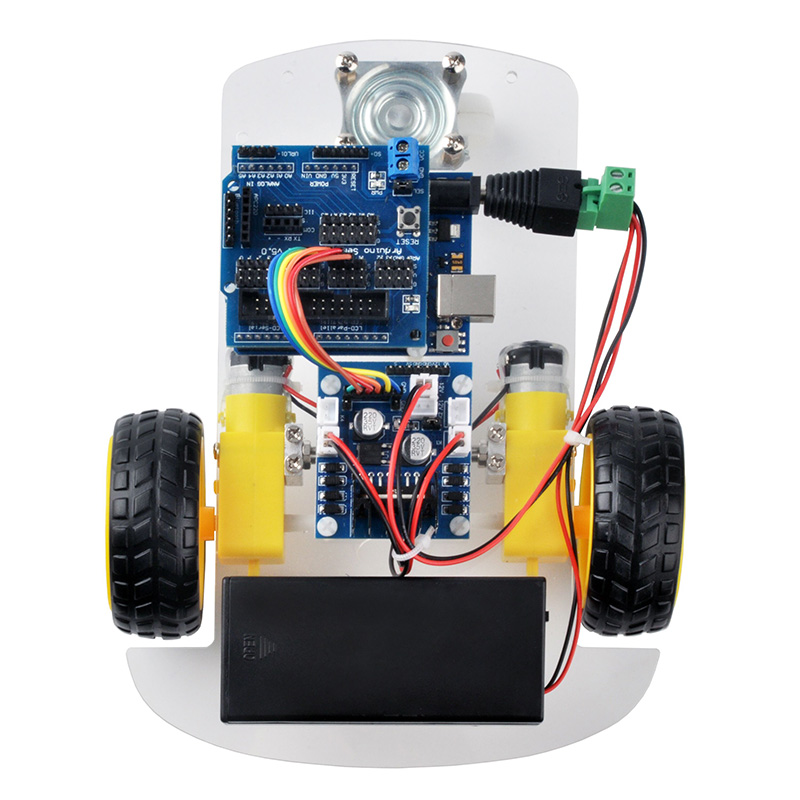
これでキットの組み立てはほぼ完了です。18650電池をセットする前に、サンプルコードをArduinoボード本体にする必要があります。
ソフトウェアのインストール方法
ステップ1:
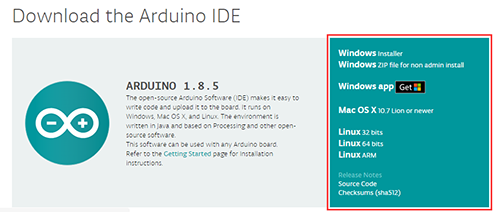
最新のArduino IDEをインストールします(1.1.16以降のArduino IDEバージョンをお持ちの場合は、この手順を飛ばしてください)。
https://www.arduino.cc/en/Main/Software?setlang=jaからArduino IDEをダウンロードして、ソフトウェアをインストールします。
ステップ2:
lesson-1.zip をダウンロードして解凍すると、lesson-1というフォルダが表示されます。
ステップ3:
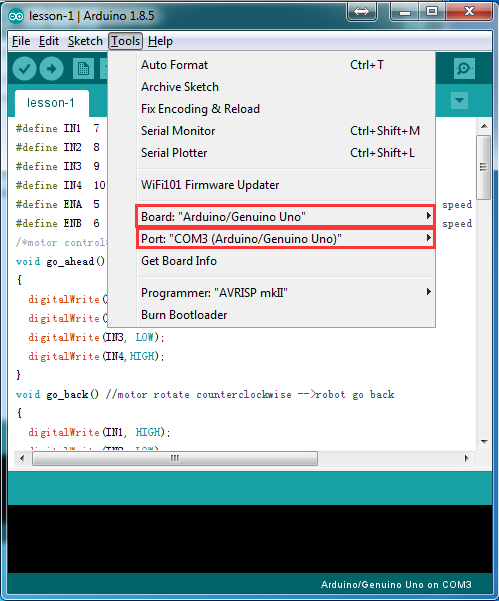
PCにUNO R3ボードをUSBケーブルで接続したら、ステップ1でダウンロードしたArduino IDEを起動してください。起動したら以下の図が示すようにツールのポードとシリアルポートを使用の環境に合わせて設定してください。
ステップ4:
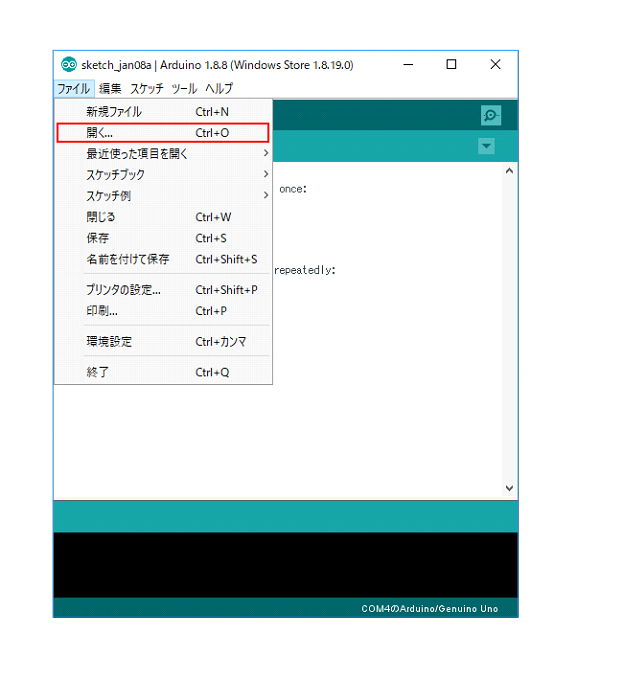
ファイルをクリック – >開くをクリック – >コード「lesson-1.ino」を選択し、Arduinoにコードをロードして、ボードにスケッチ(サンプルコード)をアップロードします。


コードの説明
以下はOSOYOO Model-Xとarduinoに関するインターフェースの設定です。
注意:ENAとENBはPWMポートに接続する必要があります。ArduinoのD3、D5、D6、D9、D10、D11はPWM出力機能を持っています。
#define IN1 7 //K1、K2モーターの進行方向を定義します。
#define IN2 8 //K1、K2モーターの進行方向を定義します。
#define IN3 9 //K3、K4モーターの進行方向を定義します。
#define IN4 10 //K3、K4モーターの進行方向を定義します。
#define ENA 5 // モータ速度を制御するには、ENA設定を変更する必要があります。
#define ENB 6 // モータ速度を制御するには、ENA設定を変更する必要があります。
以下の設定は、車の前進、後退、停止、右折、左折の設定となります。
void go_ahead() //モータが時計回りに回転 -->前進
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4,HIGH);
}
void go_back() //モータが反時計回りに回転 -->後退
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4,LOW);
}
void go_stop() //モータブレーキ -->停止
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4,LOW);
}
void turn_right(int t) //左のモータは時計回りに回転し、右のモータは反時計回りに回転 -->右折
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
delay(t);
}
void turn_left(int t) //左モータは反時計回りに回転し、右モータは時計回りに開店>左折
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
delay(t);
}
以下の関数はモーター速度を変えることができます。ENAは左のモーター速度を変えることができます、ENBは右のモーター速度を変えることができます。
このパラメーターの有効範囲は0から255です
void set_motorspeed(int lspeed,int rspeed) //モーター速度の変更
{
analogWrite(ENA,lspeed);//左側を制御します。0-255で設定してください。
analogWrite(ENB,rspeed);//右側を制御します。0-255で設定してください。
}
テスト
ArduinoとPCを接続しているUSBケーブルを取り外し、フル充電された2個の18650バッテリーを下の図に従て取り付けてください(ボックスの指示を確認し、極性の方向が正しいことを確認します。そうしないと、破壊して火災の原因となります)。

車を地面に置き、バッテリーボックスの電源スイッチをONにします。車を2秒間前進させてから2秒間後退させ、次に2秒間左折し、次に2秒間右折して停止します。
車が上記の結果のように動かない場合は、接続が間違っているか電池の充電残量が不十分の可能性があります。またサンプルコードを変更している場合はコードの再チェックをお願い致します。