内容
認定オンライン小売業者
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
 |
 |
 |
 |
 |
 |
目的
OSOYOO 2WDロボットカースターターキットのレッスンへようこそ!
このレッスンでは、レッスン1とレッスン2で構築した内容をベースに、2つの白と黒を識別するトラッキングセンサーを追加します。もしレッスン1が完了していない場合は、先にレッスン1を完了させてください。
このレッスンでは、トラッキングセンサーが白と黒を識別し、自動的にトラックラインに沿って移動します。基本的に床が白に近ければ黒のテープでラインを作成してください。微調整はセンサー本体で行います。

|
デバイス
|
画像
|
数量
|
付属品
|
|
OSOYOO UNO R3 (Arduino UNO R3と完全互換性があります)
|
 |
1 |
M3×6プラスチックネジ x 3
M3ププラスチックナット x 4
M3×5 + 6プラスチックスペーサー x 4 |
OSOYOO Model-Xモータードライバーモジュール
|
 |
1 |
M3×6プラスチックネジ x 4
M3プラスチックナット x 4
M3×5 + 6プラスチックスペーサー x 4 |
|
|
 |
|
|
| トラッキングセンサーモジュール |
 |
2 |
M3×5ネジ x4
M3×10ダブルパス銅製スペーサー x2 |
|
|
 |
|
M3×6プラスチックネジ x 1
M3プラスチックナット x 1
M3×5 + 6プラスチックスペーサー x 1 |
|
|
 |
|
|
|
|
 |
1
|
|
|
|
 |
|
|
|
|
![]()  |
|
|
|
|
|
1 |
M3×10ダブルパス銅製スペーサー x 4
M3×5ネジ x 8 |
18650バッテリーボックス
(電池は含まれていません、電池の高さ≦67 mm)
|
 |
1 |
M3×10ネジ x 4
M3×10ナット x 4 |
|
|
 |
|
|
|
|
 |
|
|
|
|
 |
|
|
|
|
 |
|
|
| 40ピン10cmメス – メスケーブル |
![]()  |
1 |
|
| 10ピン30cmメス – メスケーブル |
 |
1 |
|
| 20ピン15cmオス – メスケーブル |
 |
1 |
|
| 結束バンド |
 |
20 |
|

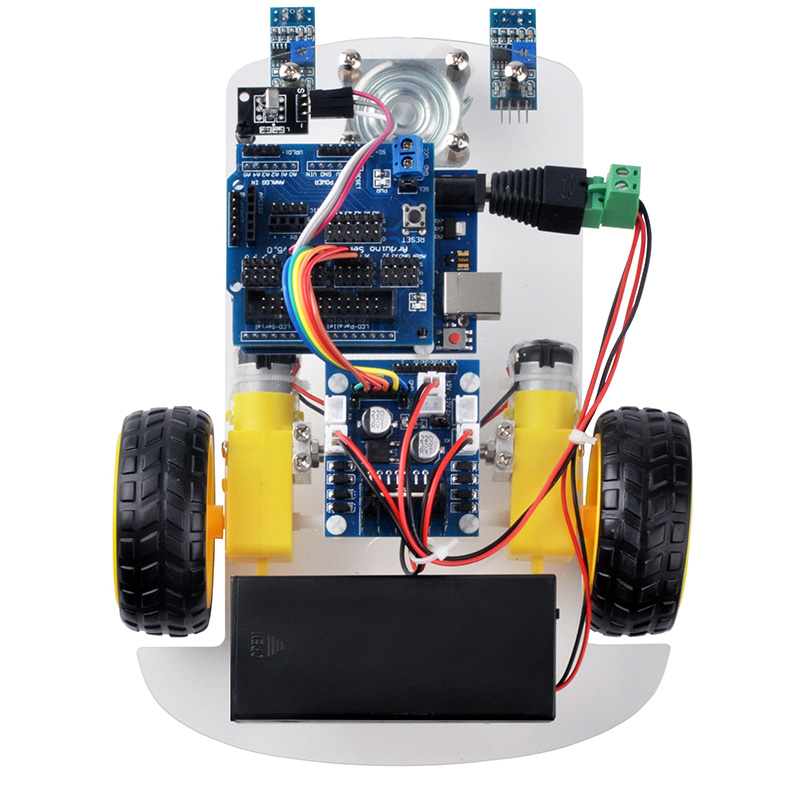
ロボットカーの組立て
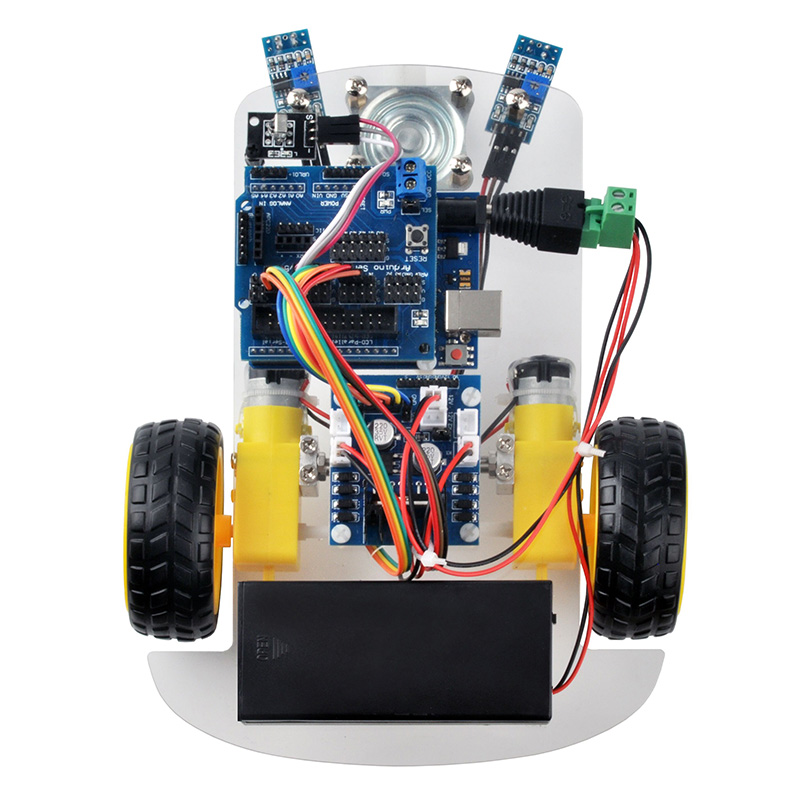
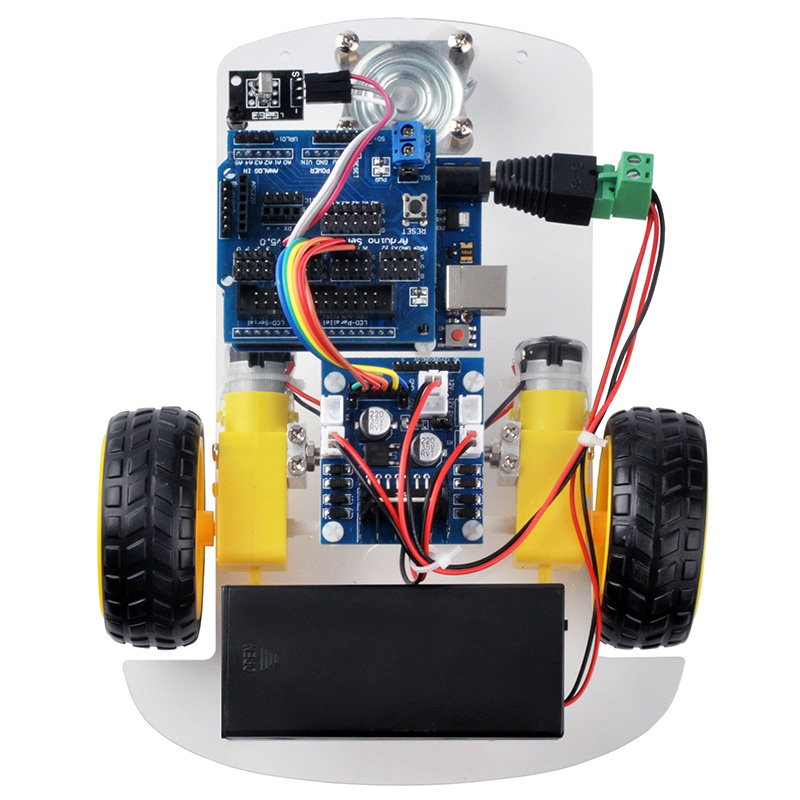
1) 2WDロボットカーのシャーシを組立てる
2WDロボットカースターターキット レッスン1とレッスン2に従って、スマートカーを組立てます。すでに組立てている場合は、既に完成している車を基本にセンサー類を追加するので、これまで組立てたパーツを外す必要はありません。
2) トラッキングセンサーモジュールを取り付けます
付属品:
- M3×5ネジ x 4
- M3×10ダブルパス銅製スペーサー x 2
2つのトラッキングセンサーモジュールをシャーシの下部に固定します。その時センサーの黒い突起物が地面側に向くようにして、上側からネジを通して固定します。
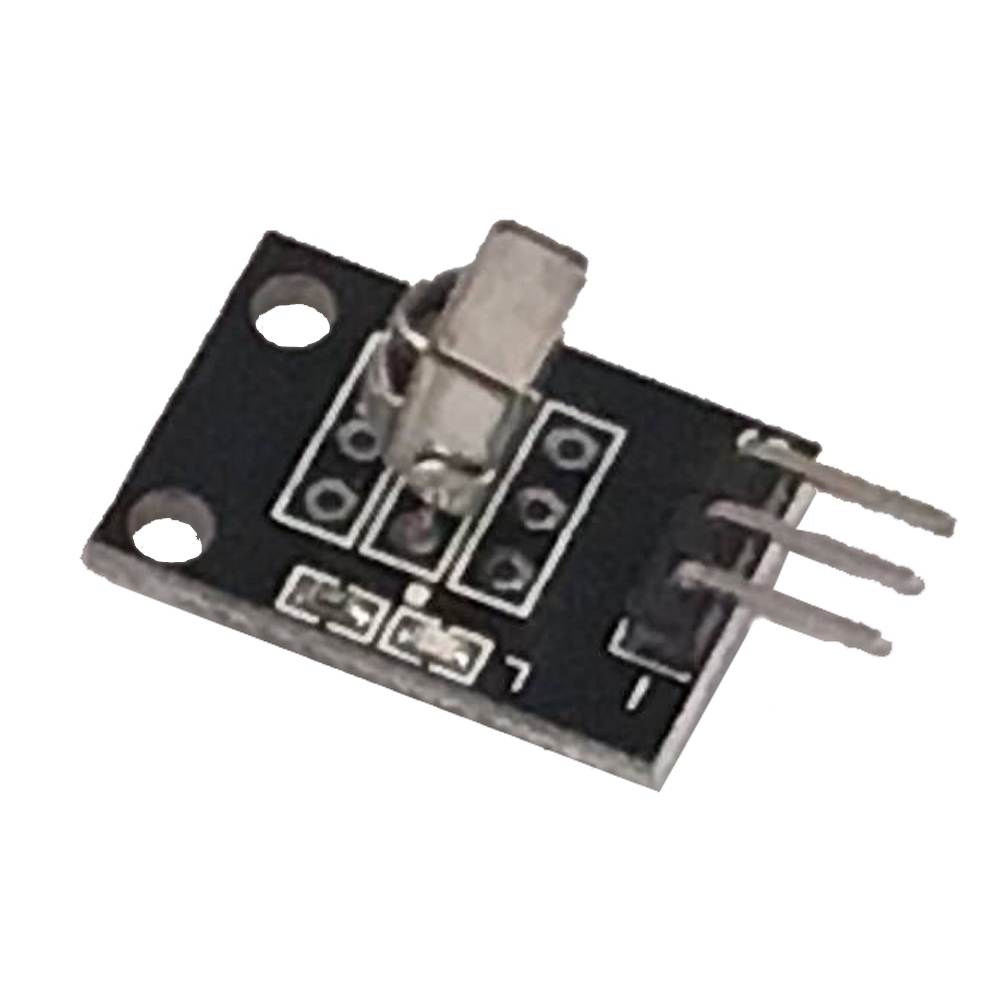
TCRT5000 Infrared Line Tracking Sensor
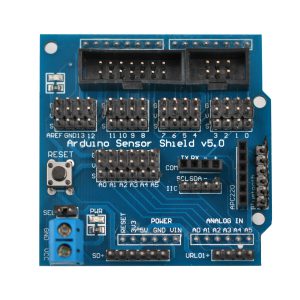
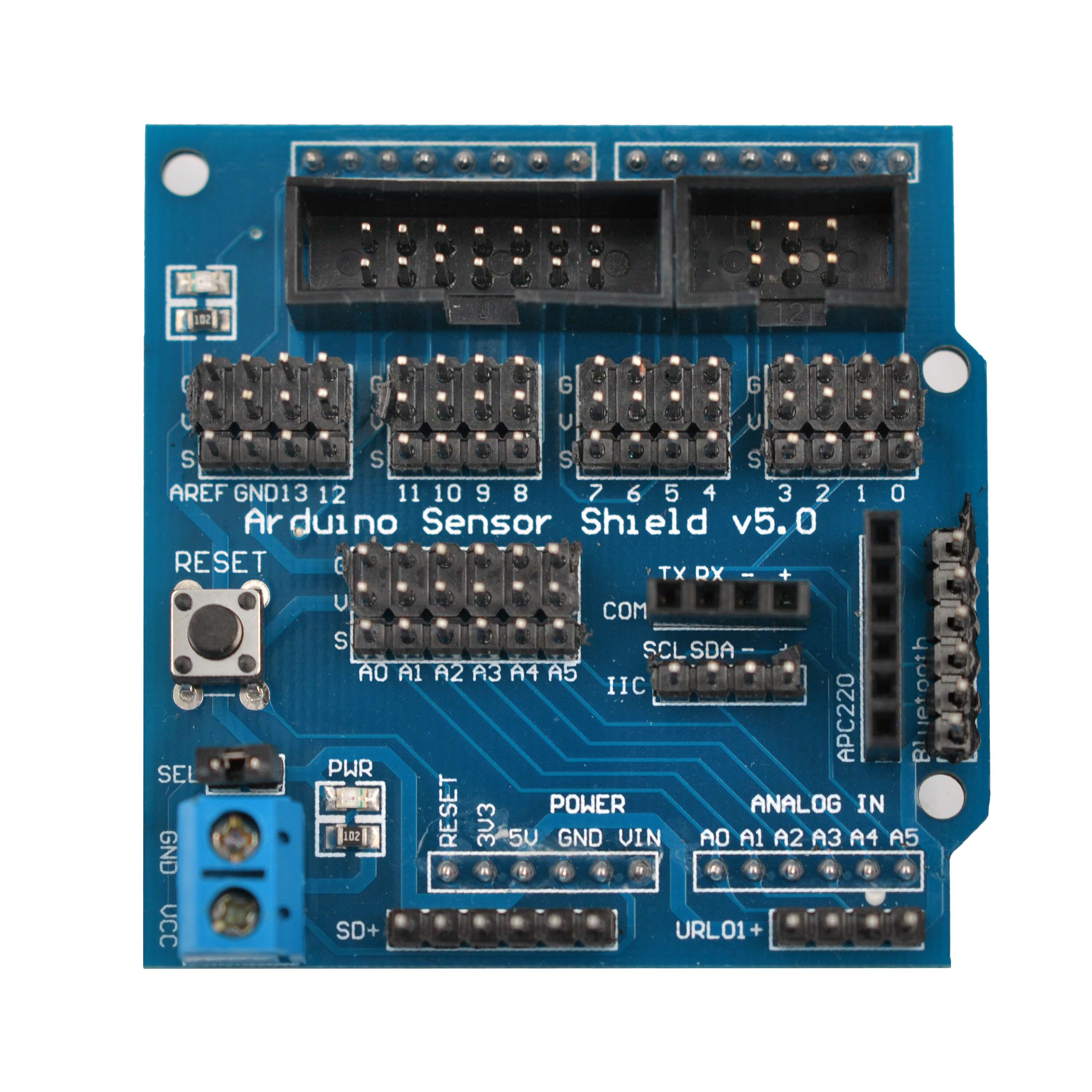
3) Arduino UNO用センサーシールドV5.0とトラッキングセンサーモジュールの配線をケーブル(メス-メス)を使って接続します。
| 右側トラッキングセンサー |
| トラッキングセンサー |
Arduino UNO用センサーシールドV5.0 |
| VCC |
5V |
| GND |
GND |
| DO |
S3 |
| AO |
使わない |
| 左側トラッキングセンサー |
| トラッキングセンサー |
Arduino UNO用センサーシールドV5.0 |
| VCC |
5V |
| GND |
GND |
| DO |
S2 |
| AO |
使わない |
ソフトウェアのインストール方法
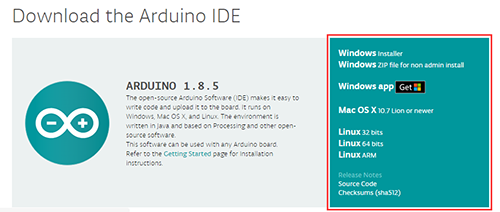
ステップ 1: 最新のArduino IDEをインストールします(1.1.16以降のArduino IDEバージョンをお持ちの場合は、このステップを飛ばしてください)。https://www.arduino.cc/en/Main/Software?setlang=jaからArduino IDEをダウンロードして、ソフトウェアをインストールします。
ステップ 2: lesson-3.zip をダウンロードして解凍すると、lesson-3というフォルダが表示されます。
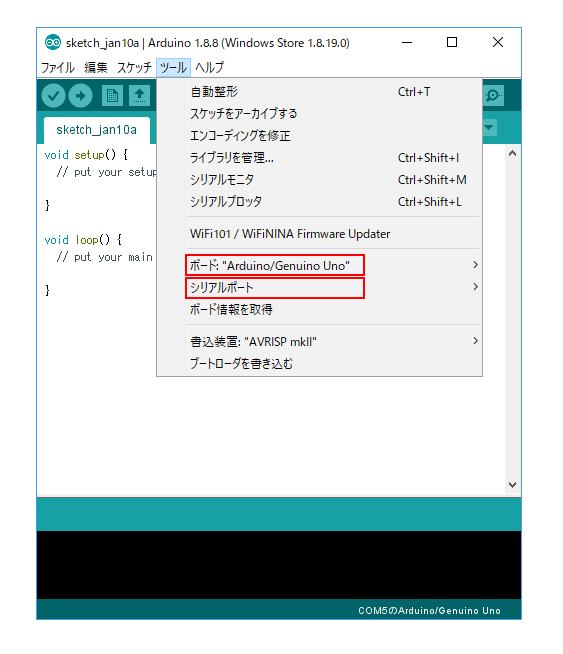
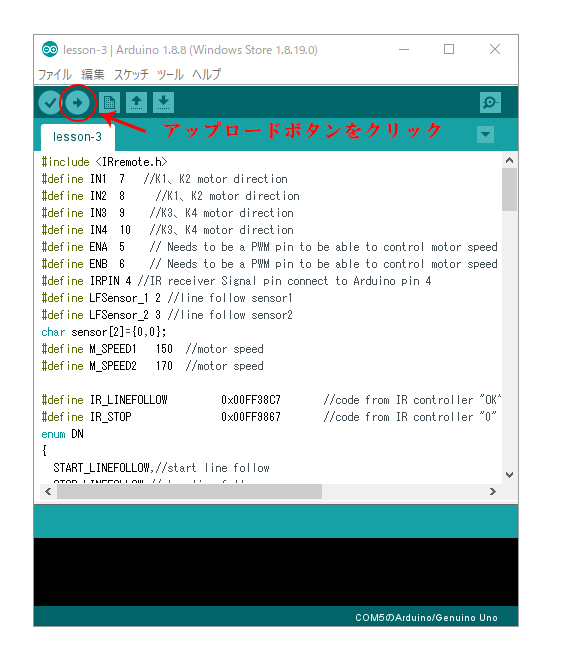
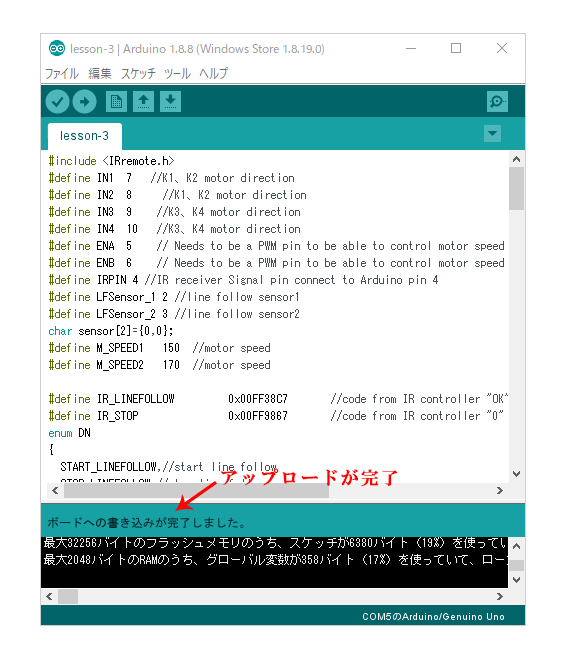
ステップ 3: USBケーブルでUNO R3ボードをPCに接続し、Arduino IDEを開き、プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
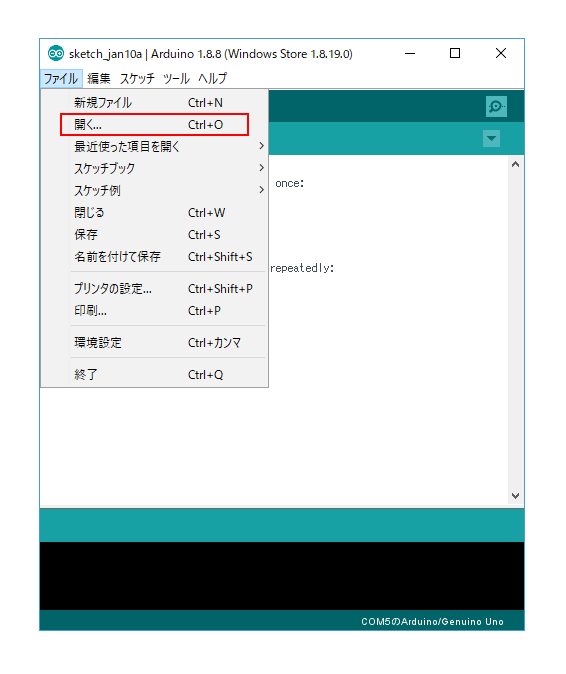
ステップ 4: Arduino IDE:ファイルをクリック – >開くをクリック – > lesson-3フォルダーにあるコード “lesson-3.ino”を選択し、コードをarduinoにロードしてください。
コードの説明
トラッキングセンサーとArduino UNOの間のポートの設定です:
#define LFSensor_1 2 //センサー1がラインを読み込む
#define LFSensor_2 3 //センサー2がラインを読み込む
配列を定義し、トレースモジュールによって検出されたシグナルを配列に格納します:
char sensor[2]={0,0};
次の2つの変数は、自動車の回転速度と実行速度を表します:
注意:速度を大きくし過ぎると、ラインの読み取りが追い付かずラインをオーバーする可能性があります。
#define M_SPEED1 150 //モーター速度
#define M_SPEED2 170 //モーター速度
以下はトラッキング機能の設定コードです。黒い線が左右のトラッキングセンサーモジュールの間にあると車は直進します。左側のトラッキングセンサーモジュールと黒い線が重なると左に曲がります。右側のトラッキングセンサーモジュールと黒い線が重なると右に曲がります。左右のトラッキングセンサーモジュールが両方とも黒い線の上にくると車は停止します。
void auto_tarcking(){
read_sensor_values();
if((sensor[0]==LOW)&&(sensor[1]==HIGH)){ //右側のセンサーは黒い線上にあります。左側のセンサーは白い線上にあります。
set_motorspeed(M_SPEED1,M_SPEED1);
turn_right(20);
}
else if((sensor[0]==HIGH)&&(sensor[1]==LOW)){//右側のセンサーは白い線上にあります。左側のセンサーは黒い線上にあります。
set_motorspeed(M_SPEED1,M_SPEED1);
turn_left(20);
}
else if((sensor[0]==LOW)&&(sensor[1]==LOW)){//左右のセンサーは白い線上にあります。
set_motorspeed(M_SPEED2,M_SPEED2);
go_ahead();
}
else if((sensor[0]==HIGH)&&(sensor[1]==HIGH)){//左右のセンサーは白い線上にあります。
go_stop();
}
}
テスト
OSOYOO UNO R3ボードをPCから外し、満充電の18650バッテリー2本をバッテリーボックスに入れます(ボックスの指示を確認し、極性の方向が正しいことを確認します)。バッテリーボックスの電源スイッチをONにしてください。
ステップ 1: 白地に黒いラインを用意します(黒いトラックの幅は20mm以上30mm以下です)。
(注意)ラインの曲げ角度は90度よりも大きくすることはできません。角度が大きすぎると、車はラインから外に移動します。
ステップ 2: トラッキングセンサーモジュールの感度を調整します。
最適な感度の状態になるまで、プラスドライバーでトラッキングセンサーのポテンショメーターを調整するために車の電源を入れたままにしてください。センサーが白地を超えるとLEDライトが点灯し、センサーが点灯します。また黒のラインの場合はLEDが消灯するので微調整をしてください。
LEDが点灯:白地の路面
LEDが消灯:黒地のライン
ステップ 3: 車の電源を入れて黒いラインの上に車を置くと、車は黒いトラックに沿って移動します。
IRコントローラーを使って「OK」を押すと、車はトラックに沿って走ります。「0」を押すと車は止まります。

動かない場合は以下の状態を確認してください:
- バッテリーが動作するか;
- IRコントローラーが受信機から離れすぎていないか;
- 接続が正しいか;
- トラッキングセンサーの感度調整が出来ているか。





















adf