説明:
3軸 QMC5883L コンパスモジュールは、I2Cを基づいて、高分解能の磁気抵抗センサーと16ビットADCが装備されており、1°〜2°までのコンパス方位精度が得られます。この小型センサは、無人偵察機やロボットナビゲーションシステムなど小さなサイズのものにも収容できます。センサは、磁場を3軸の差動電圧として出力します。 この電圧レベルシフトは、進行方向の計算や、異なる方向からの磁場の感知に使用できるデジタル値として出力されます。 増幅、自動消磁ストラップドライバ、オフセットキャンセルなどの信号調整が組み込まれています。このモジュールには、MIC5205-2.5電圧レギュレータも搭載していますので、3.3V〜5VのDC電源に接続することができます。
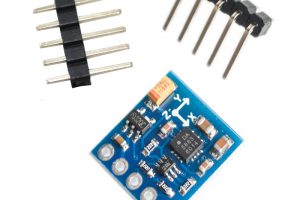
特徴:
- I2C インタフェース
- 3.3V~5.0V の入力電圧対応
- 最大出力レート200Hz
- 高精度
使い方:
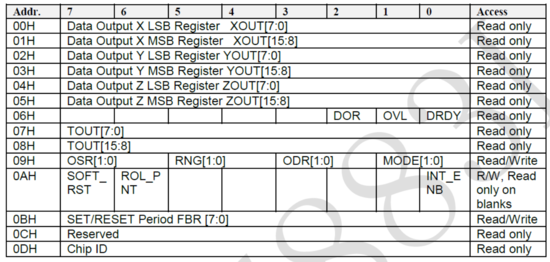
下記のregister mapをご参照して、モジュールから獲得したのデータ理解できます。QMC5883Lには14個のレジスタがあり、その中の2つの制御レジスタがデバイスは工作モードを決定し、アドレスは「09H」と「0AH」になります。
残りのレジスタのほとんどは、読み出し専用のデータ出力レジスタ、ステータスレジスタおよび識別レジスタです。
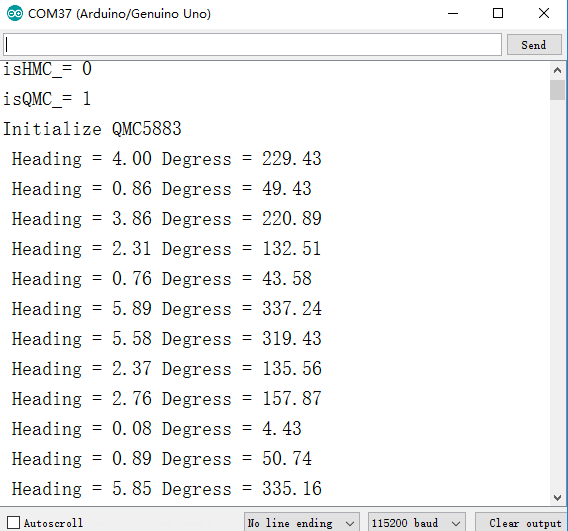
このプロジェクトでは、QMC5883Lモジュールを使って、南とこのモジュール間の方位角数値を出力します。
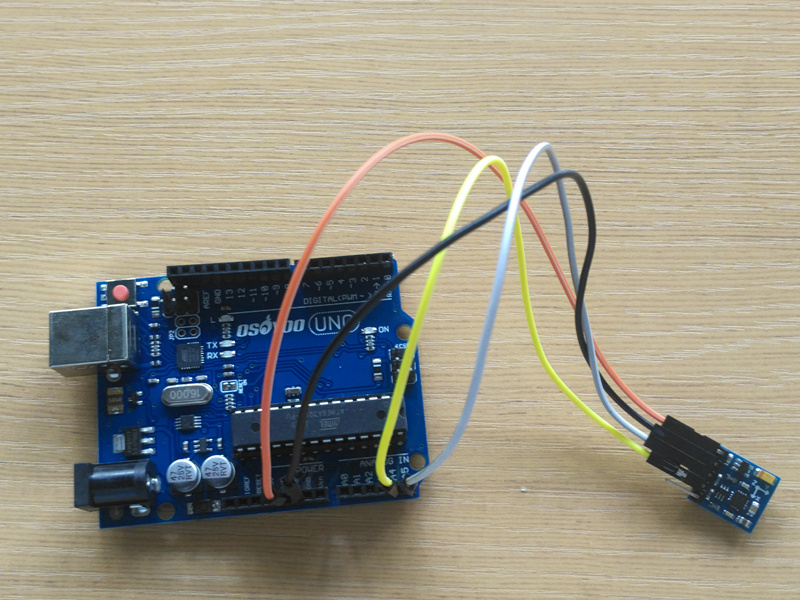
- I2Cポートを使って、QMC5883Lコンパスモジュールとアルドゥイーノ基盤を接続してください。QMC5883Lコンパスモジュール水平の状態に置いてください。
- 次のリンクでライブラリをダウンロードして: QMC5883L Compass library .ダウンロードしたのZIPファイルを解凍して、アルドゥイーノIDE のフォルダ「 ..\arduino-1.x.x\libraries」に置いてくださいませ。
- アルドゥイーノIDEに:File -> Example ->DFRobot_QMC5883\QMC5883_compassを選択してください。
- 選択したのコードのアップロードしてください。
- アルドゥイーノIDEにserial monitor窓を開けて、獲得したのデータをご確認よろしくお願い致します。
リソース:










{kind=link}
Hi
I tried this and i get
isHMC_= 0
isQMC_= 0
Could not find a valid QMC5883 sensor, check wiring!
Forgot to mention
I2C Scanner reports 0x0C as address.
Is this right?