I am having some trouble with this lesson. The car seems to run away from black, rather than trying to stay on the black track. It treats it like a wall. Is this code related or something in the sensor set up? I have double checked all the wiring connections.
Could incorrect connections damage the IR sensors permanently? Mine are not working after working b4. I accidentally put the pins incorrectly. I fixed it, but the IR sensors are not working.
What do you mean “after working b4”? Do you test Lesson 1 or other lessons?
Do you adjust the sensitivity of tracking sensor modules before running? Are you willing to send videos or photos to my email: [email protected]?
bonjour,
j’ai un problème avec le robot, il ne détecte pas e noir mais que 2 sur 5 detectent mes doigts… je n’arrive pas a ajuster la sensibilitée.
comment faire ???
cordialement
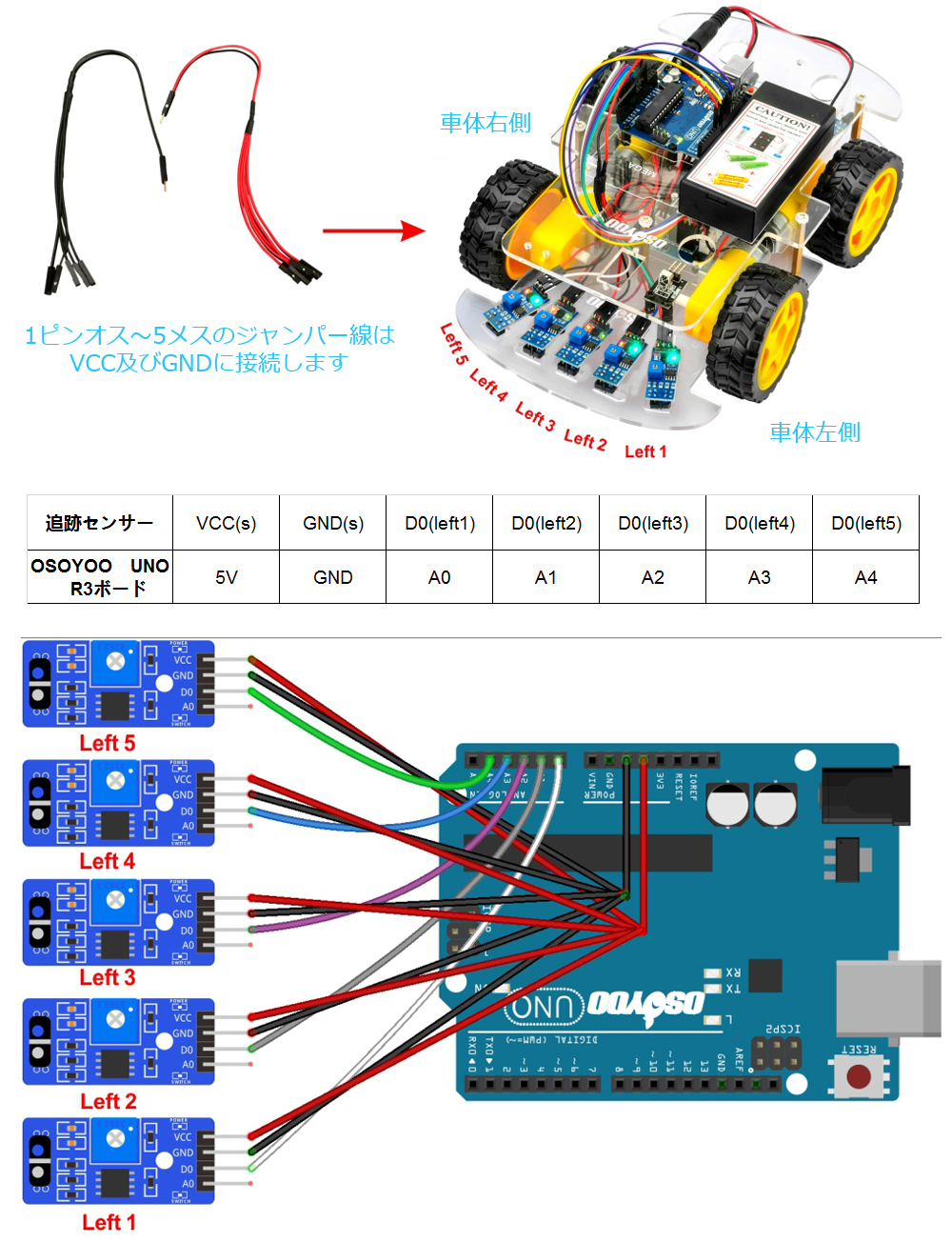
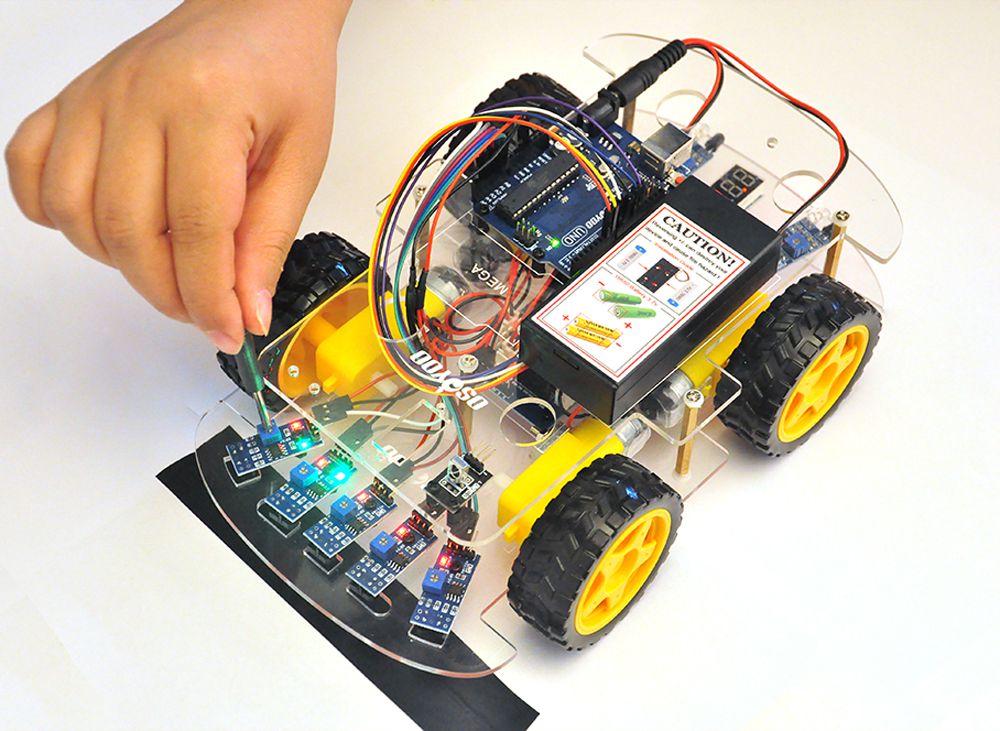
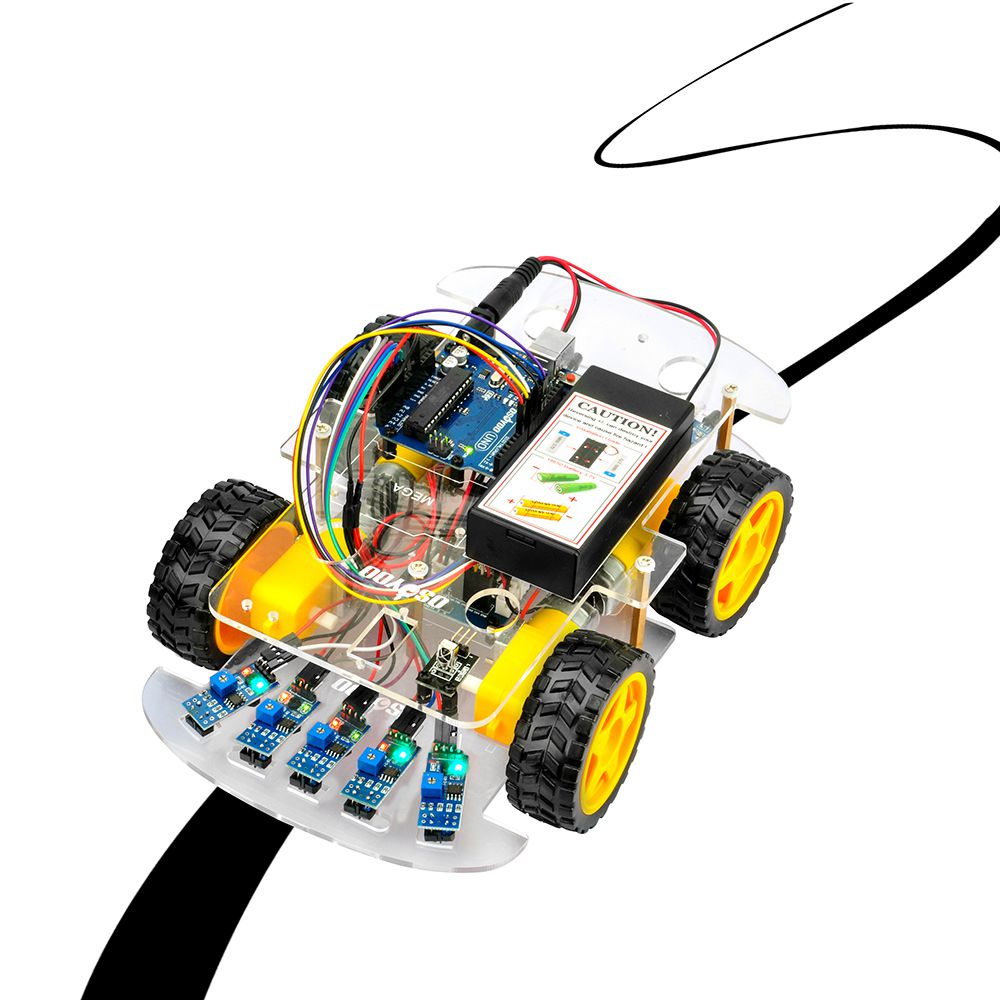
Please follow the following step to adjust the sensitivity of tracking sensor modules: Turn on and hold the car and adjust the potentiometer on the tracking sensor with cross screwdriver until you get the best sensitivity status: the signal indicate LED light will turn on when sensor is above white ground, and the signal LED will turn off when the sensor is above black track













I am having some trouble with this lesson. The car seems to run away from black, rather than trying to stay on the black track. It treats it like a wall. Is this code related or something in the sensor set up? I have double checked all the wiring connections.
Thank you.
Do you adjust the sensitivity of tracking sensor modules before running? Are you willing to send a video and send to my email: [email protected]?
Could incorrect connections damage the IR sensors permanently? Mine are not working after working b4. I accidentally put the pins incorrectly. I fixed it, but the IR sensors are not working.
What do you mean “after working b4”? Do you test Lesson 1 or other lessons?
Do you adjust the sensitivity of tracking sensor modules before running? Are you willing to send videos or photos to my email: [email protected]?
bonjour,
j’ai un problème avec le robot, il ne détecte pas e noir mais que 2 sur 5 detectent mes doigts… je n’arrive pas a ajuster la sensibilitée.
comment faire ???
cordialement
Please follow the following step to adjust the sensitivity of tracking sensor modules: Turn on and hold the car and adjust the potentiometer on the tracking sensor with cross screwdriver until you get the best sensitivity status: the signal indicate LED light will turn on when sensor is above white ground, and the signal LED will turn off when the sensor is above black track