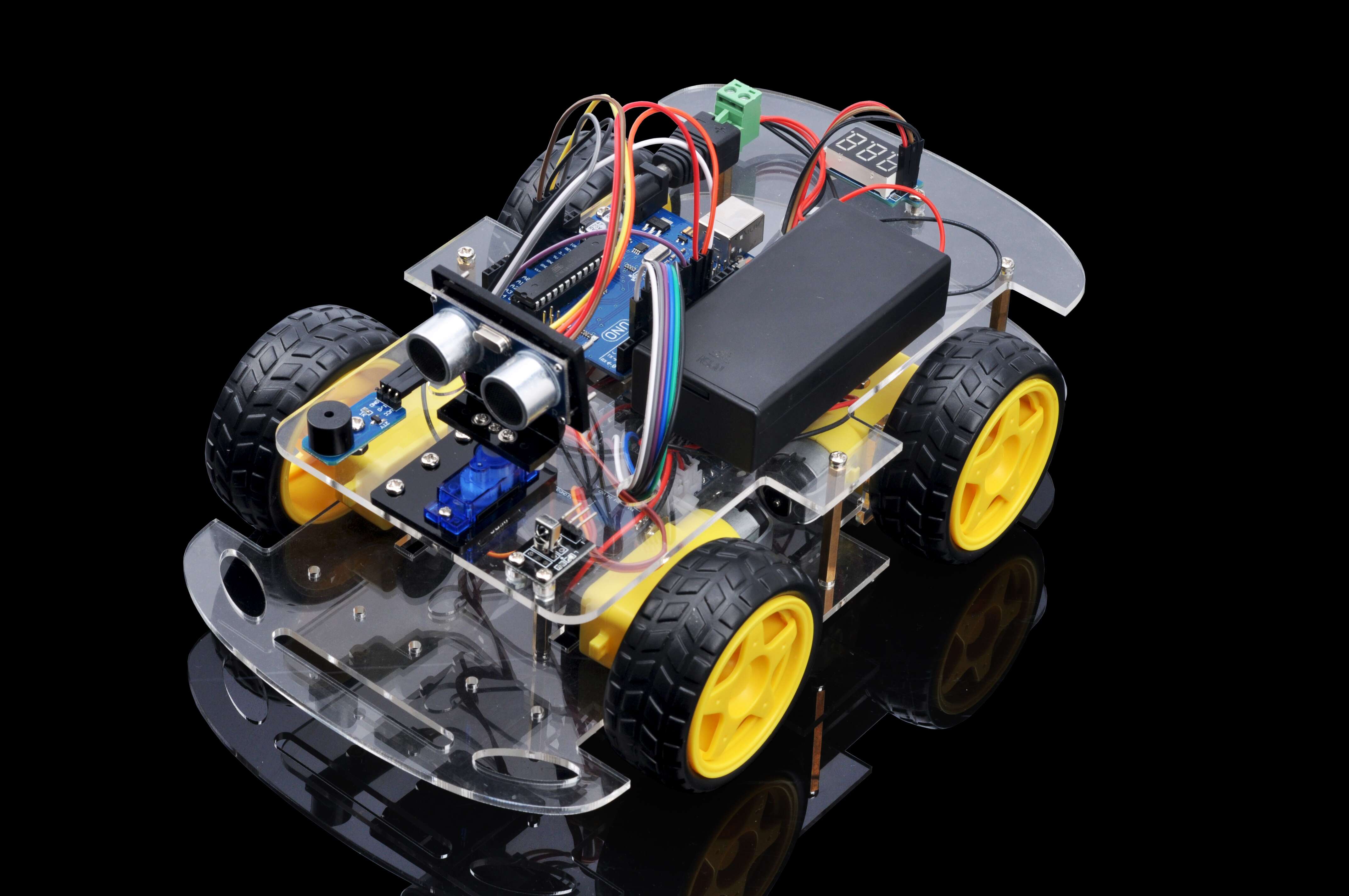
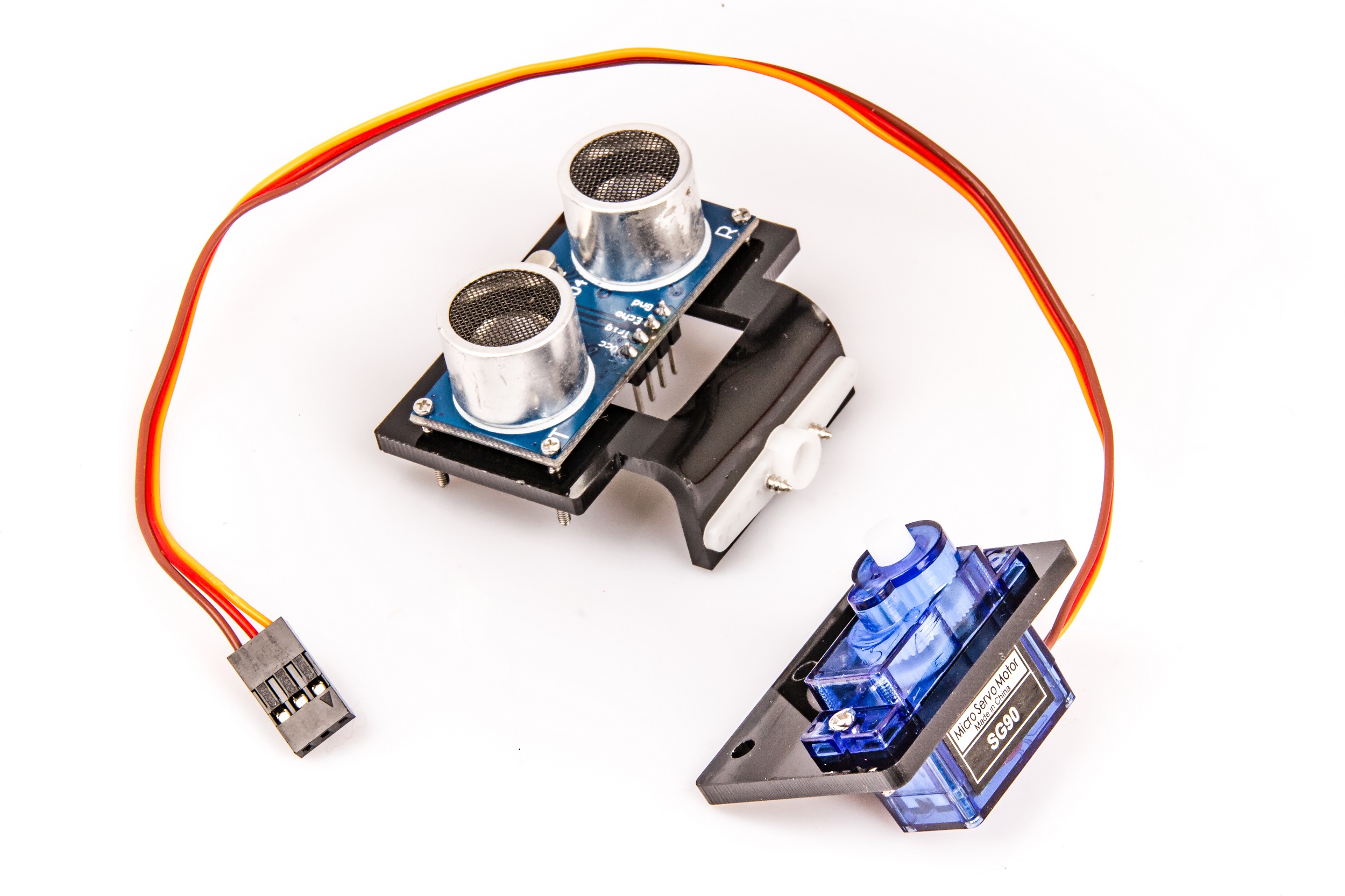
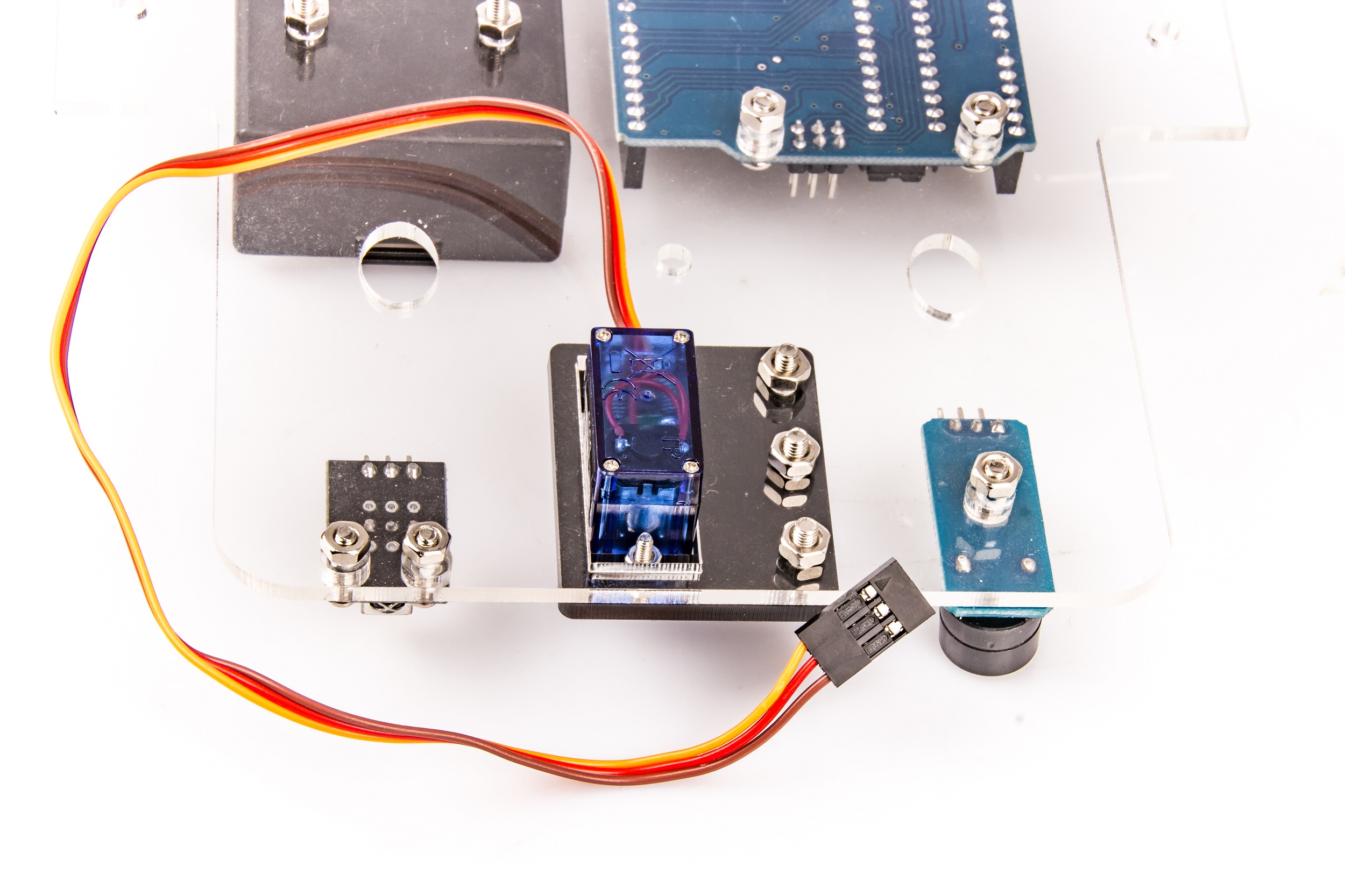
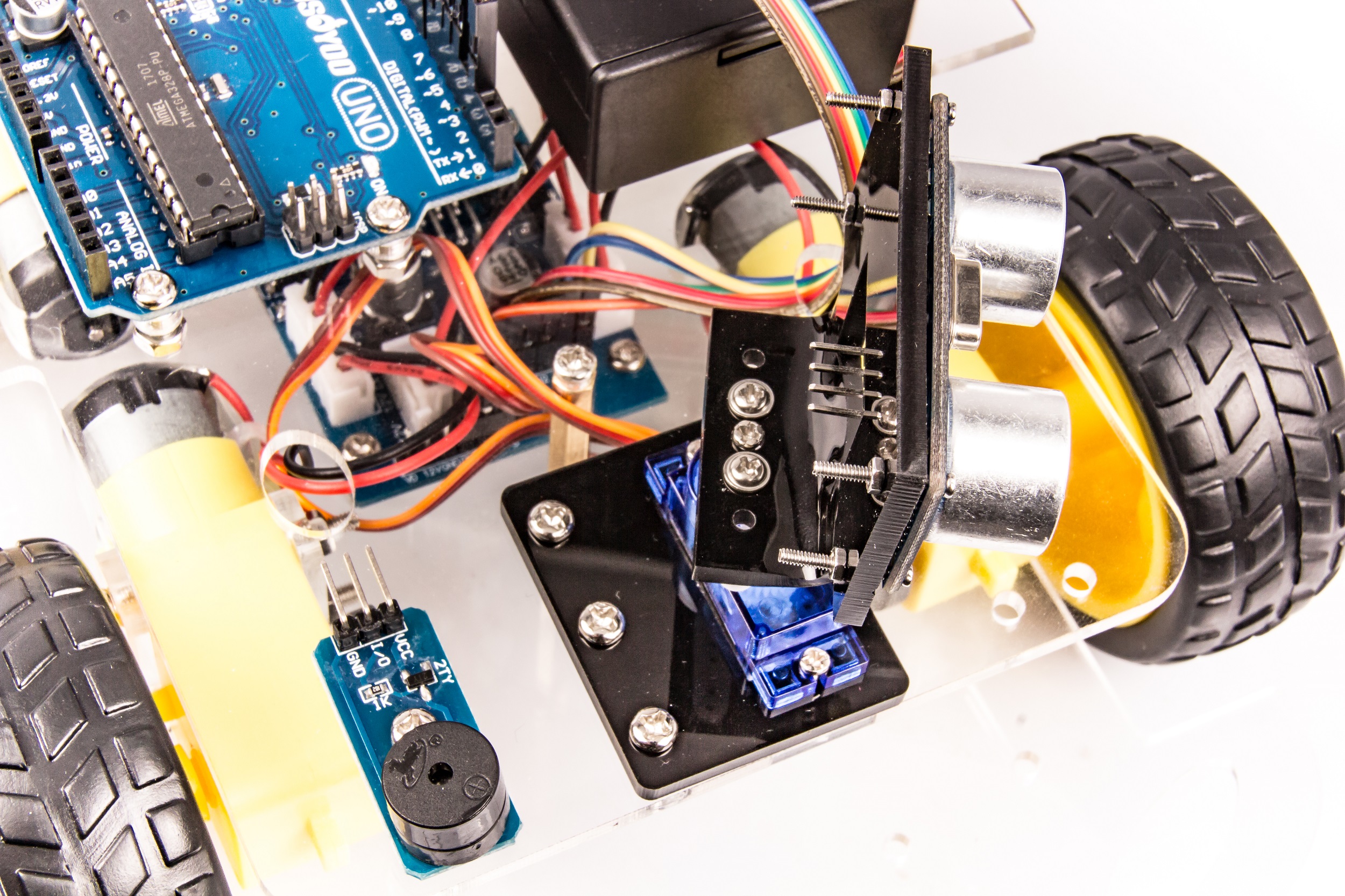
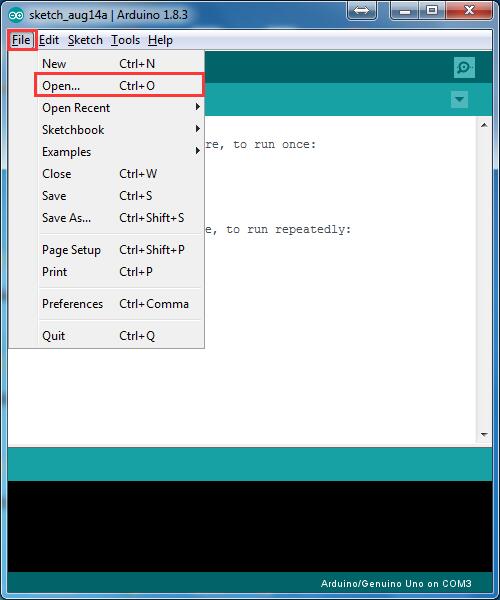
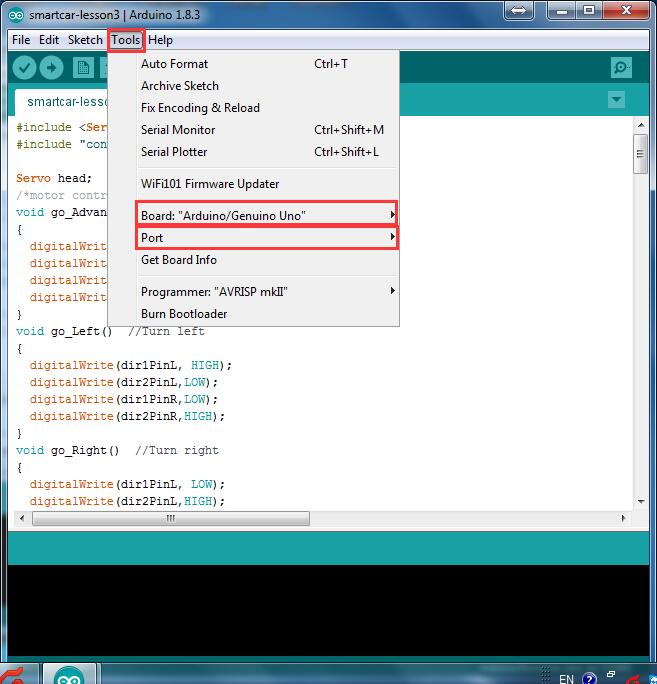
ダウンロードしたのzipファイルを解凍して、アルドゥイーノIDEを使用して、コードをボードにアップロードして、バッテリーボックスでの電源スイッチを入れて、 サーボモータが90度の位置(真ん中の位置)に回ります、このとき、超音波センサーが車の真正面を向いていない場合は、手でセンサーを真正面に調整して下さい。 最後に、M2 x 10ネジを使って、超音波モジュールをSG90サーボモータにに固定して下さい。
Arduino:1.8.11 Hourly Build 2019/11/11 03:33 (Windows 10), לוח:”Arduino Uno”
smartcar-lesson3:1:10: error: Servo.h: No such file or directory
compilation terminated.
exit status 1
Servo.h: No such file or directory
“Show verbose output during compilation”
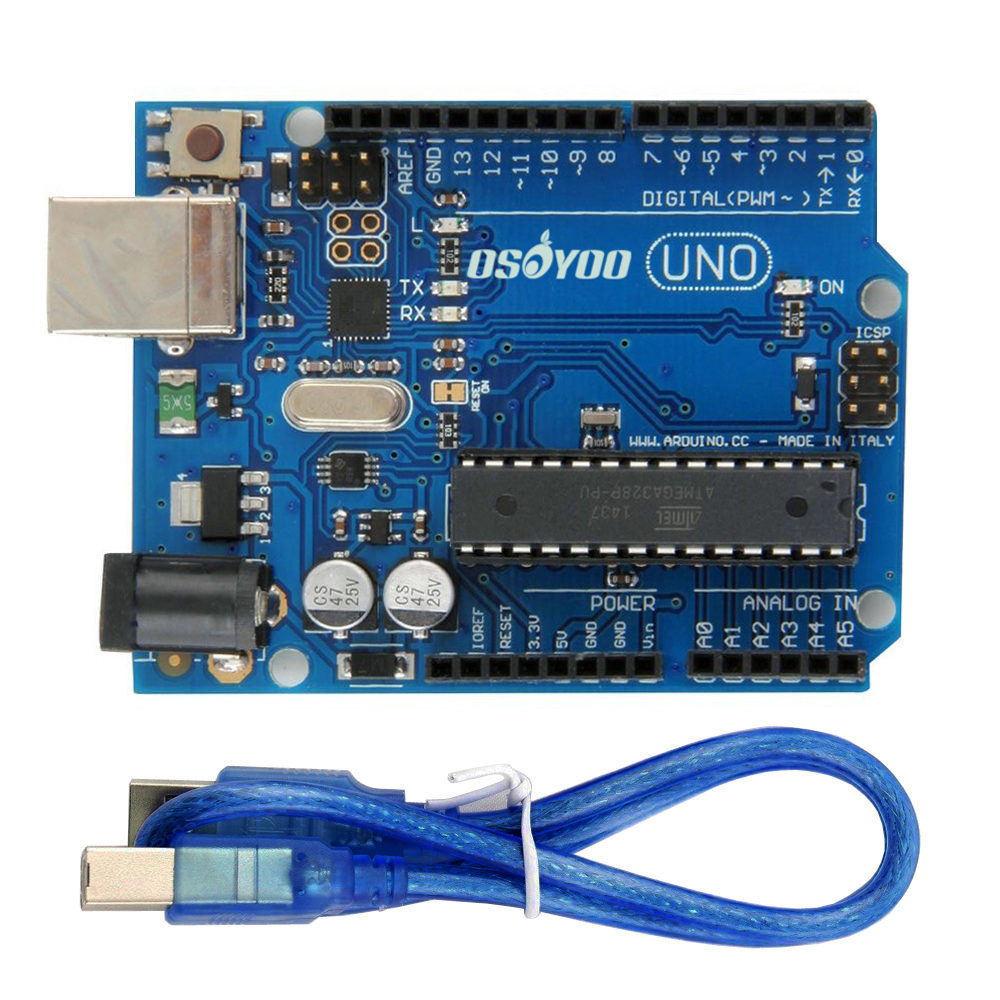
It seems that your Arduino IDE version does not support Servo library. Normally Servo library should come with Arduino IDE.
I suggest you install the latest Windows Arduino IDE version and re-compile the sketch again. Do not use Arduino IDE in linux. Linux Arduino IDE might lack many libaries.
In order to make sure beginning orientation of your ultrasonic sensor(two BIG EYES) facing to front, the first two seconds after you turning on the battery, the servo will rotate to 90degree position(stay there for 2 seconds). So if your ultrasonic sensor is not facing the front at the beginning two seconds, you need to turn off the battery. release your ultrasonic sensor from servo and reposition it. Make it facing front and fasten it.
If your ultrasonic sensor does not facing front at the beginning, the car can not properly do obstacle avoidance.























Arduino:1.8.11 Hourly Build 2019/11/11 03:33 (Windows 10), לוח:”Arduino Uno”
smartcar-lesson3:1:10: error: Servo.h: No such file or directory
compilation terminated.
exit status 1
Servo.h: No such file or directory
“Show verbose output during compilation”
Please Download and install the servo library from:
https://osoyoo.com/driver/Servo.zip
Arduino:1.8.11 Hourly Build 2019/11/11 03:33 (Windows 10), לוח:”Arduino Uno”
smartcar-lesson3:1:10: error: Servo.h: No such file or directory
compilation terminated.
exit status 1
Servo.h: No such file or directory
“Show verbose output during compilation”
It seems that your Arduino IDE version does not support Servo library. Normally Servo library should come with Arduino IDE.
I suggest you install the latest Windows Arduino IDE version and re-compile the sketch again. Do not use Arduino IDE in linux. Linux Arduino IDE might lack many libaries.
Thanks a lot for your help everything works fine I’ll continue to the next step
Wired it and uploaded the program, turned it on and it beeped. Then it proceeded to shoot backwards.. how do I troubleshoot this?
does the robot rotate the two big eyes(ultrasonic sensor)?
It moves the eyes once off to the side.
In order to make sure beginning orientation of your ultrasonic sensor(two BIG EYES) facing to front, the first two seconds after you turning on the battery, the servo will rotate to 90degree position(stay there for 2 seconds). So if your ultrasonic sensor is not facing the front at the beginning two seconds, you need to turn off the battery. release your ultrasonic sensor from servo and reposition it. Make it facing front and fasten it.
If your ultrasonic sensor does not facing front at the beginning, the car can not properly do obstacle avoidance.