ユーザーマニュアルは次の場所からダウンロードできます。
注:ARDUINO用のすべてのOSOYOO製品は、ARDUINOと完全に互換性のあるサードパーティボードです。
認定オンライン小売業者
| アメリカから購入 |
英国から購入 |
DEから購入 |
IT部門から購入 |
フランスから購入 |
ESから購入 |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
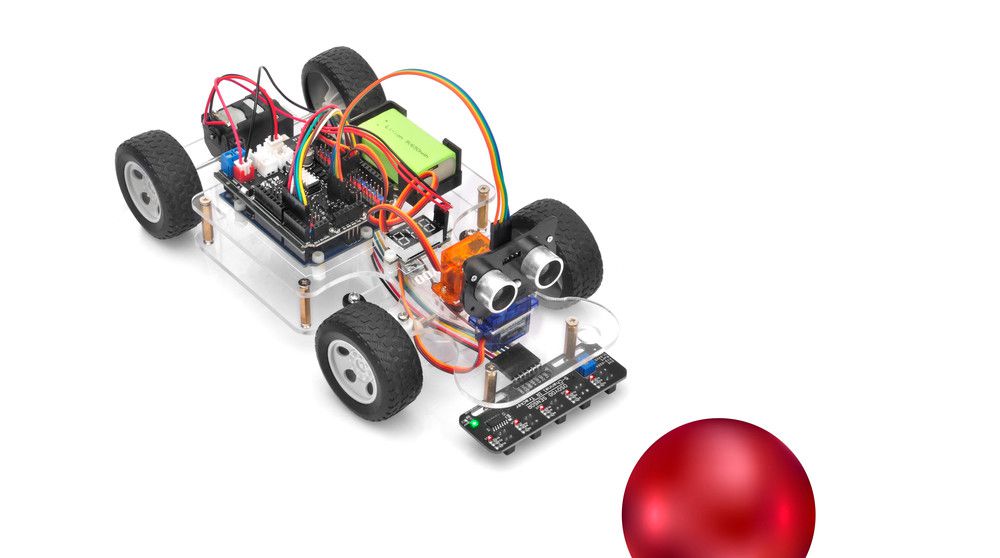
目的
このチュートリアルでは、超音波モジュールを使用して障害物を「見て」距離を測定します。距離が事前定義されたしきい値未満の場合、スポーツカーは自動的に障害物から向きを変えます。
車のフレームを完成させない場合は、レッスン1を確認してください

ソフトウェアのインストール
ステップ1:https://osoyoo.com/driver/sg90car/PWMServo.zip からPWMServoライブラリをダウンロードし、Arduino IDEにインポートしてください。レッスン 2 を完了している場合は、この手順をスキップしてください。
ステップ2:レッスン4のサンプルコードをダウンロードし、ダウンロードしたzipファイルを解凍します sg90car-lesson4.zip、sg90car-lesson4というフォルダが表示されます。
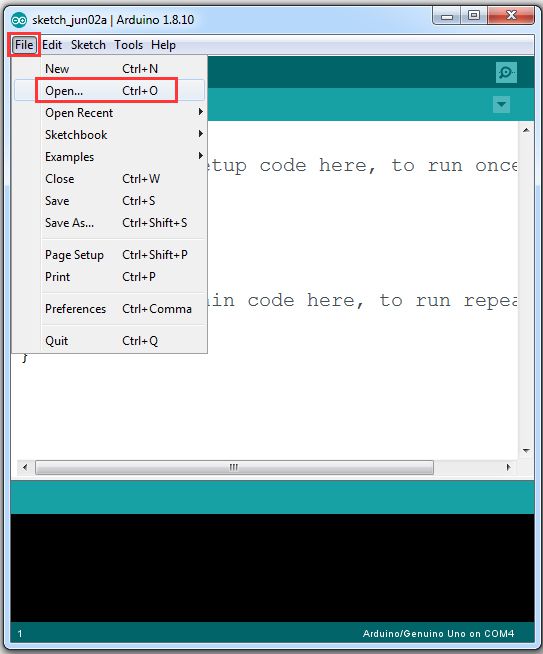
ステップ 3: UNO R3ボードをUSBケーブルでPCに接続し、Arduino→IDEを開き、[ファイル]をクリックしてクリック→[開く]をクリックして→コードを選択します “sg90car-lesson4.ino” sg90car-lesson4フォルダで, Arduino用のOSOYOOベーシックボードにコードをロードします.
注意: スケッチコードをArduino用OSOYOOベーシックボードにアップロードするときは、バッテリーを切るか、電源アダプターを抜いてください。
ステップ4:90 行目のデフォルト値 19 をレッスン 1 の FRONT 値として変更してください。レッスン1のステップ5のオプション1としてホイールの方向を手動で合わせる場合は、この手順をスキップしてください。
#define FRONT 90 //degree when steering facing straight forward
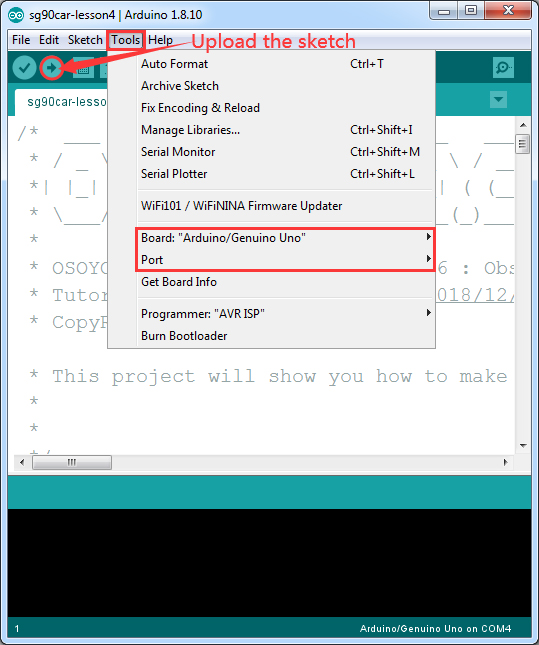
ステップ5:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
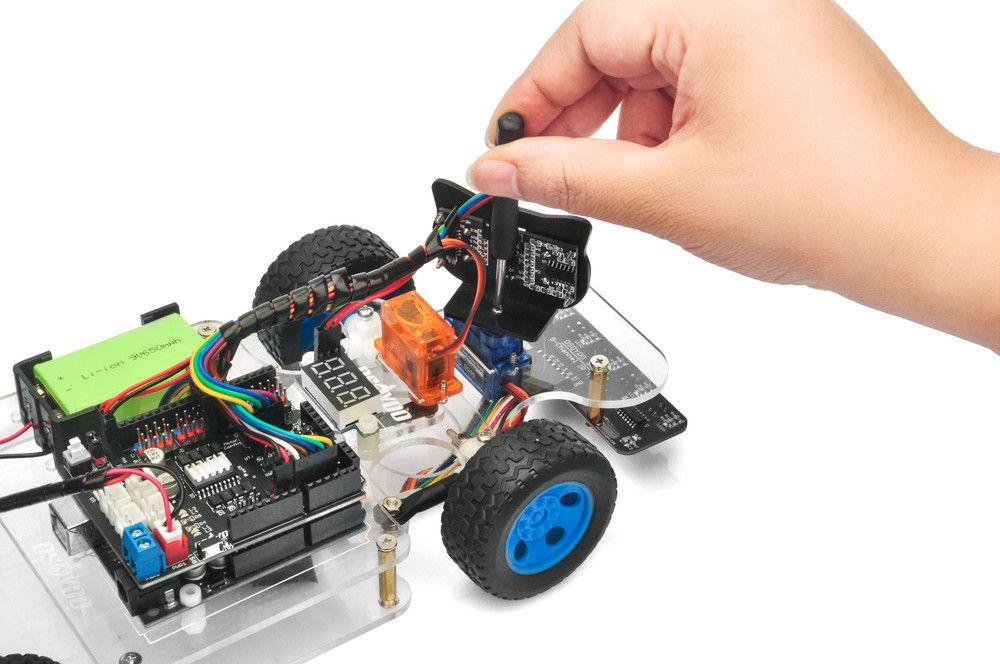
ステップ6: 超音波センササーボ初期方向アライメント
車の電源を入れた後、超音波センサーが移動し、最終的に2秒間その方向に停止します。この最初の2秒間は、超音波センサー(両目)が真正面を向いていることを確認する必要があります。まっすぐ進まない場合は、次の図のように、すぐに車の電源を切り、センサーをサーボから取り外し、再度取り付けて、まっすぐ前方を向くようにする必要があります。そうしないと、障害物回避プログラムが正しく機能しません。
最終テスト
1. Arduino用OSOYOOベーシックボードをPCから切り離し、OSOYOOモーターシールドの電源スイッチがオフになっていることを確認してから、9Vバッテリーをバッテリーボックスに入れます。
(注:極方向が正しいことを確認してください、そうしないとデバイスが破壊され、火災の危険を引き起こす可能性があります)。
2.車を地面に置き、OSOYOOモーターシールドのスイッチをオンにします。障害物が検出されない場合、車は前進します。障害物が検出されると、車は停止し、超音波モジュールは右から左に回転して周囲の障害物を検出します。ロボットカーは、障害物センサーデータと障害物回避アルゴリズムに従って、左折、右折、または後進を決定します。
車が衝突して超音波センサーの位置が変わることがある場合は、リンクステップ6に従ってセンサーの方向調整を再度行うことを忘れないでください。
注:上記の結果のように車が動かない場合は、トラッキングセンサーの配線接続、バッテリー容量を確認する必要がありますtage(7.2v以上である必要があります)。
4.右または左の天使を変更する場合は、コードの20行目から23行目を編集して、スケッチを再度アップロードしてください。 (注:天使は35を超えて設定することはできません)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5.車の速度を変更する場合は、スケッチの次のコードを修正してください(注:最大値は255です)
#define SPEED 170
#define FAST_SPEED 230
#define MID_SPEED 180