Mecanum Wheel Robot Car Paquete completo (con baterías 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
En esta lección, usaremos Mobile para controlar nuestro automóvil robot y hacer una conducción de imitación. Dado que se trata de un simulacro de conducción, utilizaremos un volante y un engranaje virtuales en nuestra aplicación para imitar a sus homólogos en el coche real.
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 ruedas izquierdas/2 ruedas derechas y 4 motores)
Placa OSOYOO Mega2560, totalmente compatible con Arduino x 1
OSOYOO Wi-Fi escudo x 1
Controlador de motor OSOYOO Modelo Y x 1
Módulo Bluetooth OSOYOO HC02
1 servomotor OSOYOO MG90
Módulo de sensor ultrasónico OSOYOO x1
Soporte de montaje ultrasónico OSOYOO
Caja de batería OSOYOO x 1
OSOYOO Cable de puente hembra a hembra de 3 pines x1
OSOYOO Cable de puente macho a hembra de 6 pines x2
OSOYOO 2 pin XH.25 hembra a hembra x1
OSOYOO Cable puente de 10 pines macho a hembra x1
Baterías 18650 (3,7 V) x 2
Debe completar la lección 1 (ensamblar el automóvil) antes de continuar con esta lección. No es necesario cambiar nada, simplemente mantenga la conexión del cable de hardware como está.
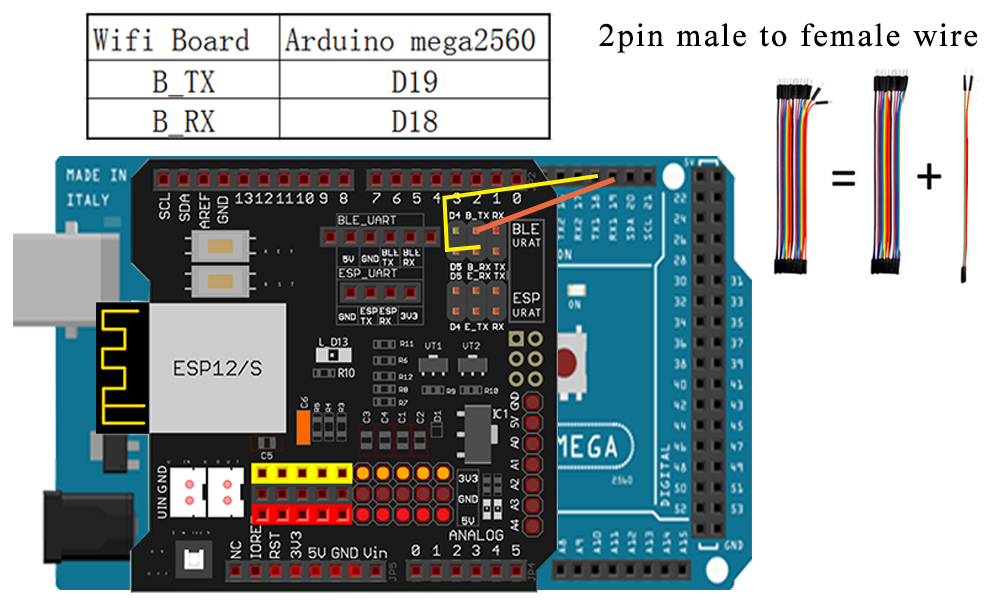
Paso 1: conecte B_TX y B_RX a D19 y D18.
(Nota: debe dividir 2 piezas de cables de puente macho a hembra de nuestro paquete de cables de puente de 10 piezas. Cualquier color del paquete estará bien. El resto de los cables de 8 piezas son piezas de repuesto para posibles cables rotos o dañados.)
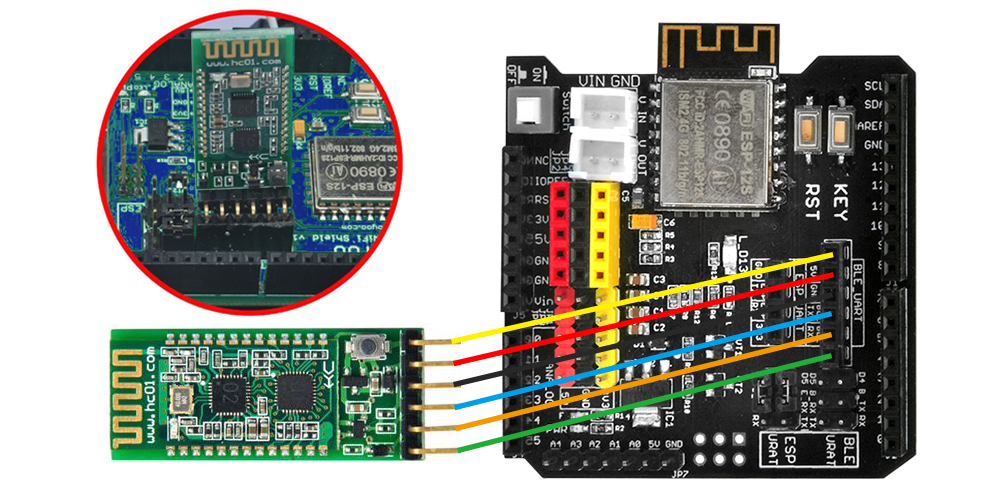
Paso 2: el módulo Bluetooth debe insertarse en la ranura Bluetooth de 6 pines en la placa Wi-Fi OSOYOO.
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descarga el IDE de Arduino desde https://www.arduino.cc/en/Main/Software?setlang=en, luego instale el programa.
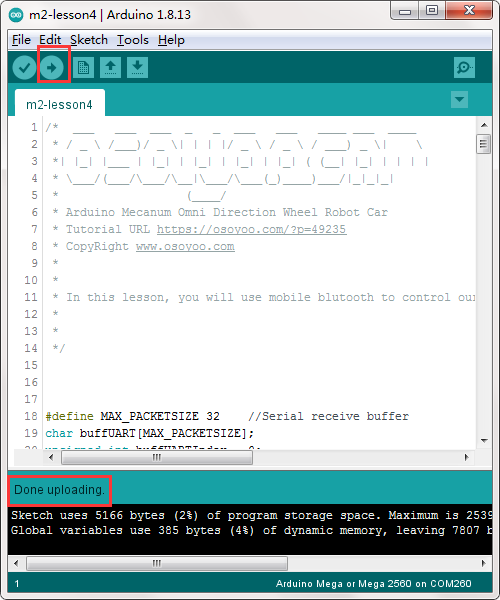
Paso 3: conecte la placa Mega2560 a la PC con un cable USB, abra Arduino IDE → haga clic en archivo → haga clic en Abrir → elija el código “m2-lesson4.ino” en la carpeta m2-lesson4, cargue el código en Arduino.
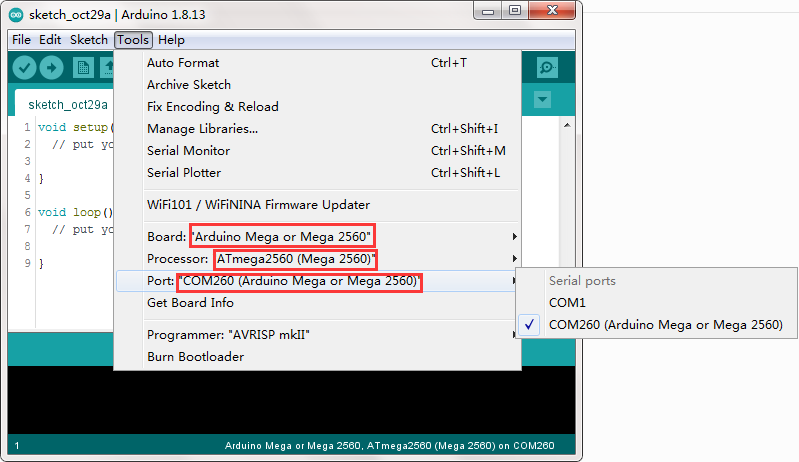
Etapa 4: Elija la placa/puerto correspondiente para su proyecto, cargue el boceto en la placa..
Aplicación movil:
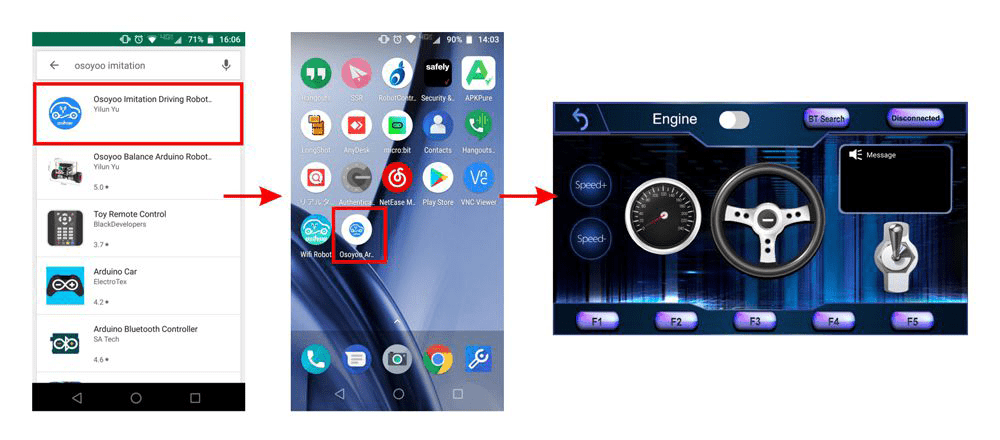
Vaya a su tienda de aplicaciones Google Play o Apple y busque el nombre de la aplicación “OSOYOO imitación de conducción”, descargue la aplicación de la siguiente manera e instálela en su teléfono inteligente.
Conectar HC-02 Bluetooth en teléfono Android. Hay un botón Búsqueda de BT en la aplicación de Android: cuando haga clic en este botón, verá una lista de dispositivos Bluetooth que se han emparejado con su aplicación. Seleccione el dispositivo HC-02 para conectar el automóvil. Una vez que el HC-02 esté conectado, el estado de Bluetooth cambiará de Desconectado a Conectado. Solo puede controlar su automóvil cuando Bluetooth está conectado.
Conectar el HC-02 Bluetooth en iPhone / iPad, simplemente haga clic en el botón Conectar y aparecerá un dispositivo HC-02 en una lista emergente. Haga clic en ese dispositivo HC-02 para conectar el módulo Bluetooth a su iPhone. Luego, el botón Conectar cambiará de nombre a Desconectar.
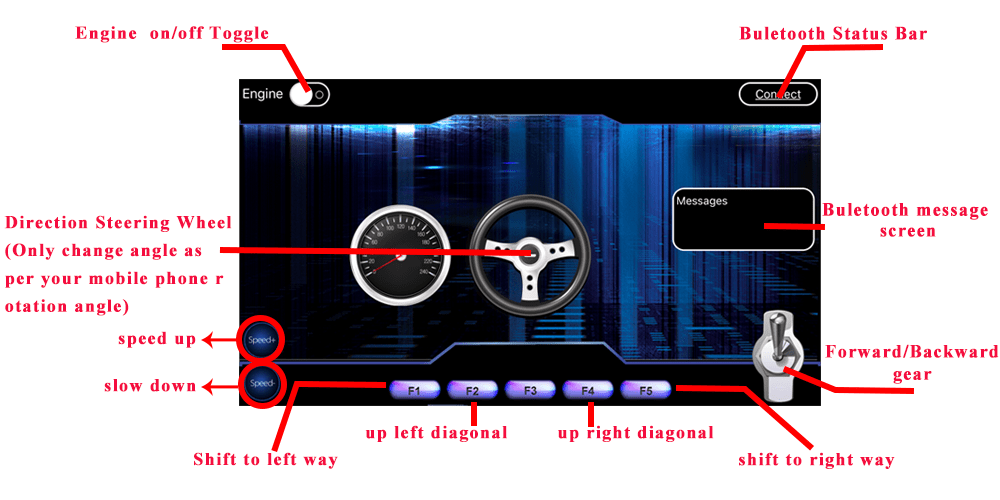
interfaz de pantalla
Encienda el robot y abra la APLICACIÓN.
1)Conecte la aplicación al módulo Bluetooth HC-02
Conectar con dispositivo Android:
Si usa un dispositivo Android y no ha emparejado el módulo Bluetooth con su teléfono celular, primero empareje el módulo Bluetooth antes de abrir la aplicación. En la Configuración de su teléfono celular → Bluetooth, busque un dispositivo Bluetooth llamado HC02, vincúlelo con la contraseña 1234. Después de emparejar el dispositivo Bluetooth HC02, abra la APLICACIÓN. Haga clic en el botón de búsqueda de BT para conectar la aplicación al dispositivo HC02.
Conectar con dispositivo iOS: Si usa un dispositivo iOS, simplemente abra la aplicación, haga clic en el botón Conectar, verá una lista de Bluetooth, seleccione el dispositivo HC02.
2)Haz clic en el interruptor del motor para arrancar/detener el coche
3)Haga clic en el botón Velocidad +/- para acelerar o reducir la velocidad
4)Gire el teléfono móvil para cambiar de dirección (el volante girará mientras gira el teléfono).
5)haga clic en el botón de engranaje para cambiar el engranaje a la dirección hacia adelante o hacia atrás.
6)presione F1 para cambiar a la izquierda, F5 para cambiar a la derecha, F3 para arriba en diagonal izquierda, F4 para arriba en diagonal derecha.
Ajuste de la velocidad del motor para un mejor rendimiento
Para obtener un mejor resultado de rendimiento de funcionamiento, el valor de la potencia del motor (velocidad) debe ajustarse correctamente según el nivel de la batería. Si el valor de la potencia del motor (velocidad) es demasiado alto, es posible que su automóvil funcione demasiado rápido y fácilmente fuera de control. Si la potencia del motor (velocidad) es demasiado baja, es posible que el automóvil ni siquiera se mueva.
Para ajustar el valor de potencia del motor, debe cambiar la línea de 3 constantes 24,25,26,27,28 en el archivo de boceto m2-lesson4:
MIN_SPEED es la potencia mínima necesaria para arrancar el coche. Si cuando el interruptor del motor de la aplicación se cambia a ROJO, pero su automóvil no se mueve, debe aumentar este valor, si el automóvil funciona demasiado rápido en el momento del arranque del motor, debe reducir este valor..
El valor TURN_SPEED, SLOW_TURN_SPEED determina la velocidad de giro de su automóvil. Si su automóvil gira demasiado rápido, debe reducir estos dos valores, si gira demasiado lento o no gira, aumente estos dos valores. Siempre haga SLOW_TURN_SPEED alrededor de 20 a 40 por debajo del valor TURN_SPEED.
El valor BACK_SPEED determina la velocidad de marcha atrás inversa.
Después de que las baterías se estén agotando, es posible que deba aumentar el valor de estas 3 constantes. Puede agregar o reducir gradualmente 10 cada vez en estos valores y comparar qué valores tienen el mejor rendimiento de seguimiento.















The app is not available for my android version 13.
Thanks