In this lesson, we will teach you how to use mobile APP to control Robot car through UDP protocol. The Raspberry Pi will run a Python program to get UDP packet from APP.
You will learn how to use Python get remote data (UDP packet) from mobile APP.
Step 1: Install the smart car basic frame work as per lesson 3. If you don’t install tracking sensor module, please completed installation in Lesson 2.
Step 1) Download OSOYOO WIFI UDP Robot Car control APP
In Google Play or Apple Store, please search key words “OSOYOO WIFI UDP Robot Car”, you will find an orange icon APP as following:
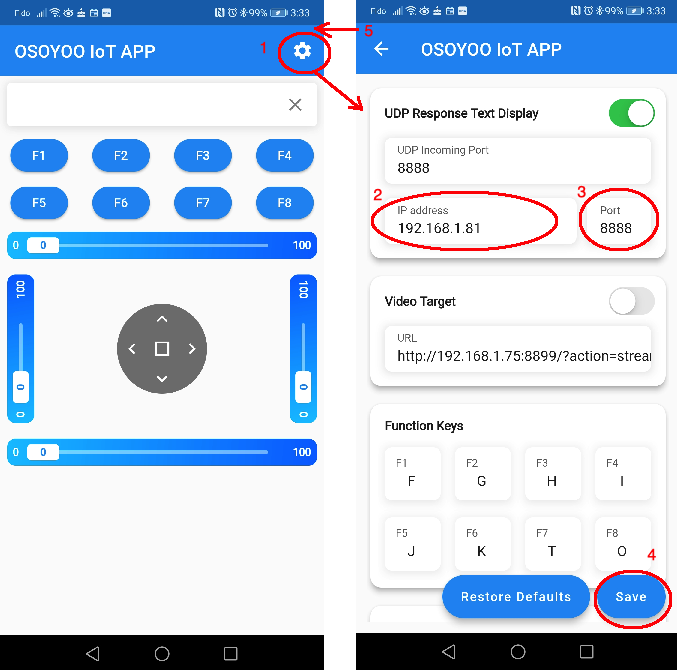
Connect your phone with the same router wifi SSID your raspberry pi use. Open the APP, click Settings, enter your Raspberry Pi IP address and Port to 8888 in settings:
Step 2)
1)Make sure you have installed rpi.gpio, pca9685 and servokit library in lesson 1 . If not, please run following two commands:
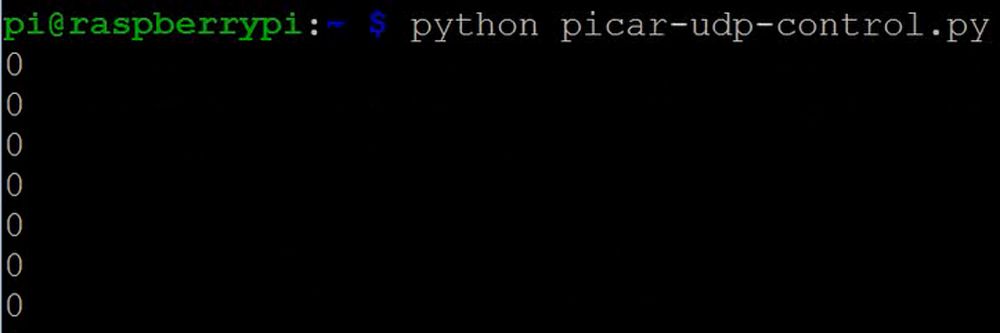
Step 4)Type following command to run the sample code:
python picar-udp-control.py
After above python is running, your car is waiting for command from your cell phone.
Step 5)
Now your can click the < > ^ v direction keys to make the car move. Use || pause key to stop the car movement.
If you click Obstacle key, the car will do obstacle avoidance auto driving similar to Lesson 3
If you click Tracking key, the car will do link tracking auto driving similar to lesson 2
Note: F1~F6 are further development functions in the future.
FAQ about the WIFI UDP APP and sketch Code:
Q1)How to tune the robot car speed? A: If you want change the speed performance of the robot car, please change values following parameters in line 33-35 in picar4.py file :
high_speed = 0x7FFF
mid_speed = 0x4FFF
low_speed = 0x2FFF
Q 2)What happened when you press buttons in OSOYOO WiFi UDP Robot Car APP ? A: When you press a button of the APP, APP will send a single-letter message through UDP protocol to target device Raspberry Pi
Button
UDP message
F1
F
F2
G
F3
H
F4
I
F5
J
F6
K
▲
A
▼
B
►
R
◄
L
square
E
F7
O
F8
T
Q3)How does Raspberry Pi python program handle the UDP command?
Line 290 to 318 while loop receives UDP data from APP and give it to viable cur_status, ticker function in line 266 – 280 handle the cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
For example , when APP ▲ key is pressed , cur_status value is A , then ticker() function call forward(mid_speed,mid_speed) function to make car moving forward.