Puede descargar el manual de usuario en

En este tutorial, utilizaremos el coche para realizar algunos movimientos sencillos. Una vez completada la instalación del coche, es muy importante probar la instalación y el código de ejemplo. Si ha pasado la prueba de movimiento de esta lección, significa que la placa básica OSOYOO para Arduino, el módulo de control del motor, los motores, las baterías, el chasis y las conexiones de cables entre estas partes funcionan bien.
Si no completa el chasis del coche, por favor revise lección 1


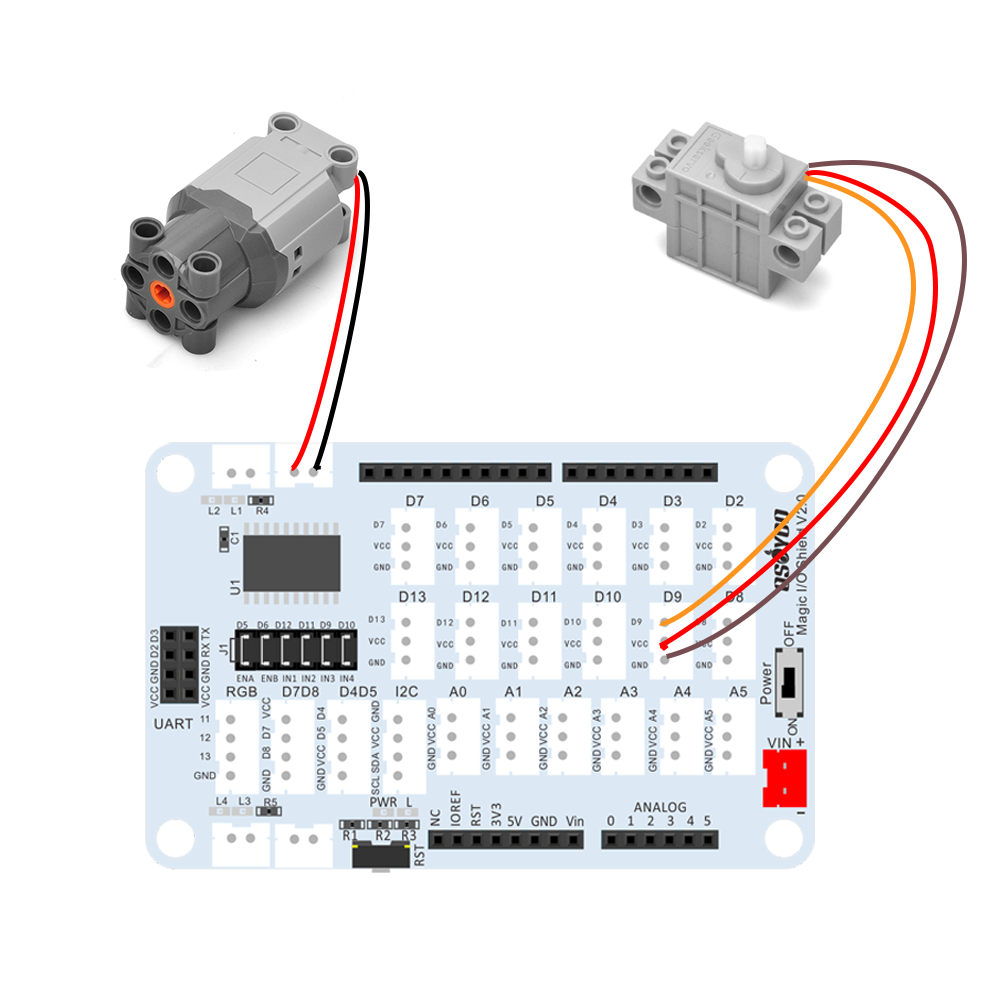
Conexión: (Atención por favor: hay seis puentes en ENA/ENB/IN1/IN2/IN3/IN4)
IN1 a D12 (puente)
IN2 a D11 (puente)
Motor a L1
Servo a D9
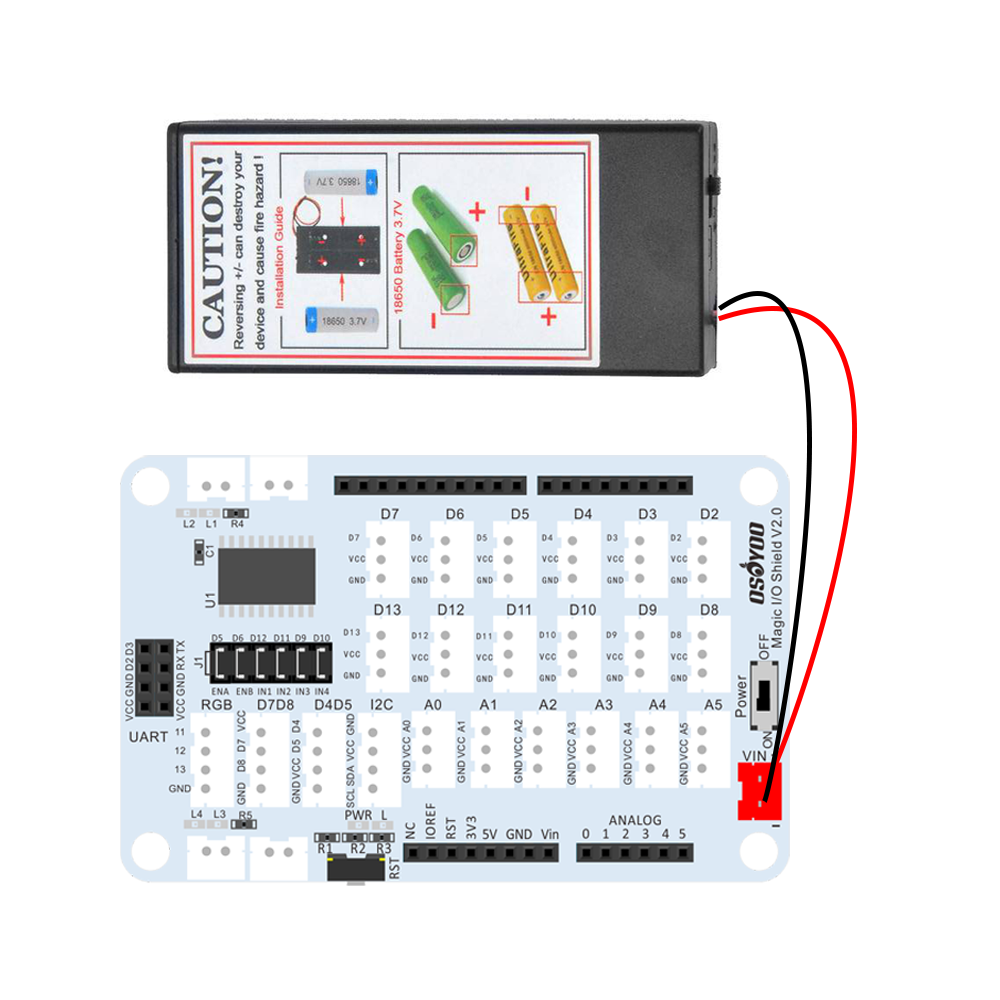
Conecte la caja de la batería al puerto de alimentación del escudo Magic I/O como se indica a continuación:
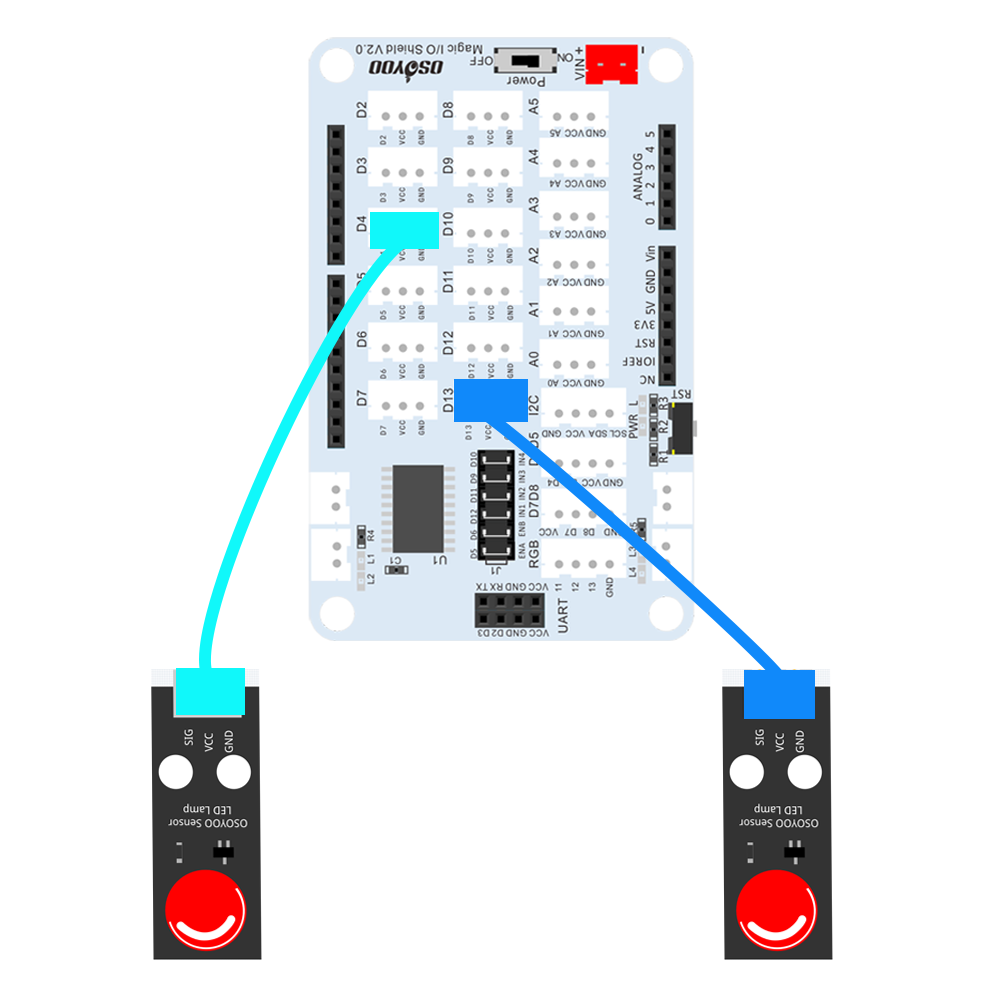
Conecte el módulo LED rojo OSOYOO al puerto de alimentación del escudo Magic I/O como se indica a continuación:
LED izquierdo – D4
LED derecho – D13

PASO 1:
Instale la última versión de IDE (Si tiene una versión de IDE posterior a la 1.1.16, omita este paso).
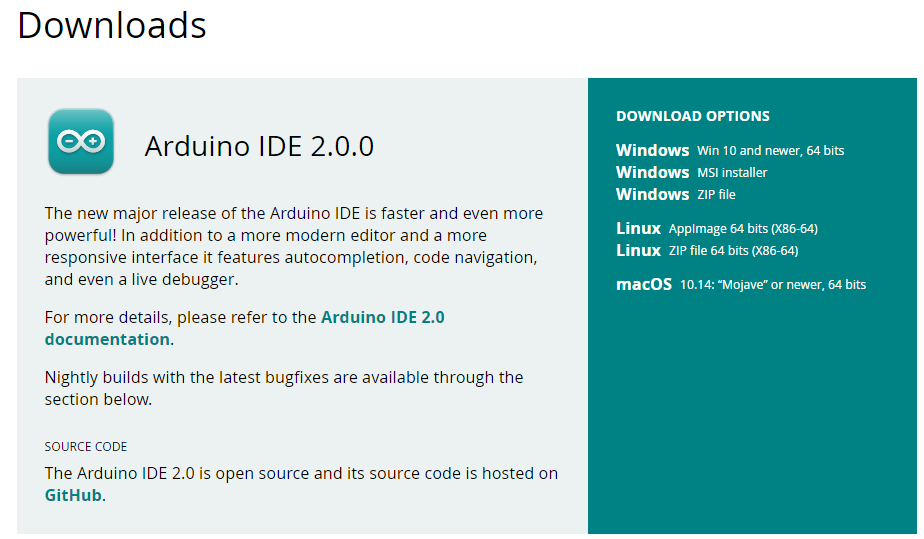
Descargue IDE desde https://www.arduino.cc/en/software, luego instale el software.
PASO 2:
Descargue el archivo zip de la librería PWMServo desde
https://osoyoo.com/driver/sg90car/PWMServo.zip ,
a continuación, importar la biblioteca en Arduino IDE(Open Arduino IDE-> haga clic en Sketch->Include Library->Add .Zip Library)

Usted verá una ventana emergente, ahora usted puede ir a su carpeta de descarga y seleccione el archivo PWMServo.zip y cargar este archivo en la biblioteca de Arduino.
PASO 3:
Descarga https://osoyoo.com/driver/2022008400/lesson2.zip , descomprímelo, verás una carpeta llamada lesson2
PASO 4:
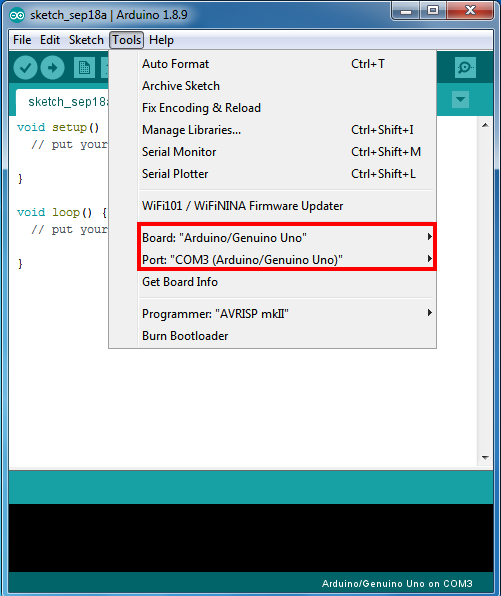
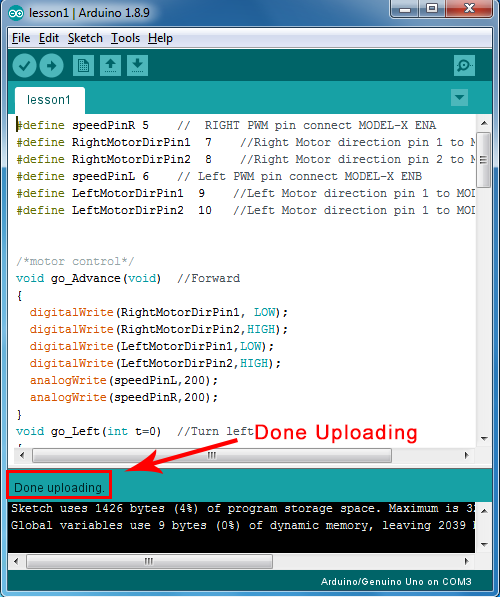
Conecte la placa UNO R3 al PC con el cable USB, abra el IDE, elija la placa/puerto correspondiente para su proyecto.
Nota: Apague la batería o desenchufe el adaptador de corriente cuando cargue el código del boceto en la placa básica OSOYOO para Arduino.
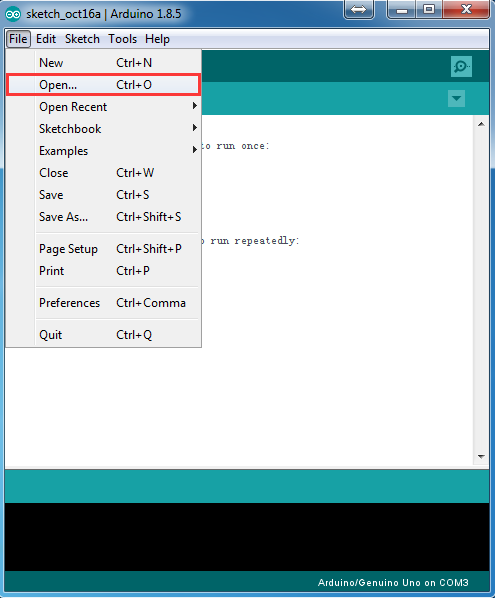
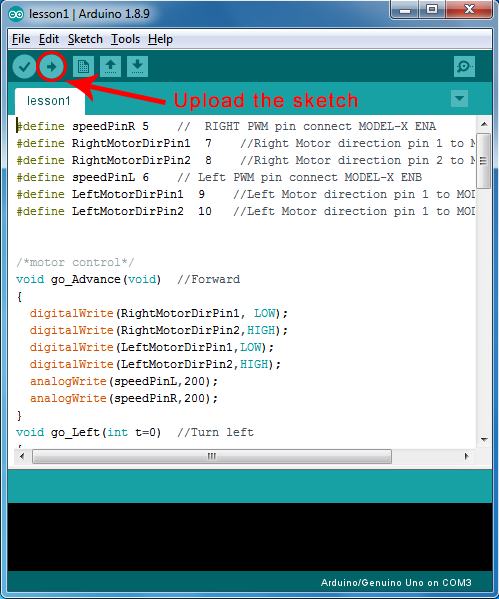
Haga clic en archivo -> haga clic en Abrir -> elija el código “lesson2.ino”, cargue el código en la Placa Básica OSOYOO para Arduino, y luego cargue el sketch en la placa.
PASO 5:
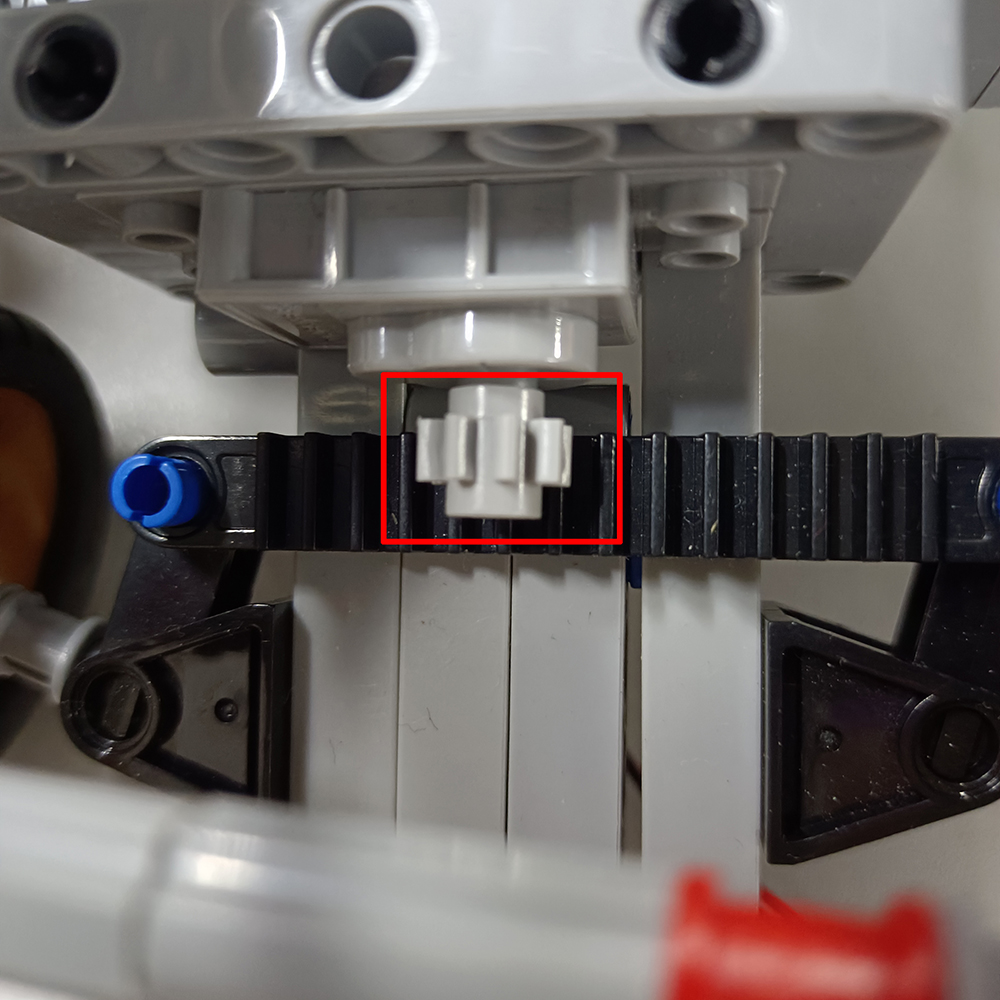
Alineación del servo: Si su servo de dirección no se enfrenta a la dirección delantera central, entonces usted tiene dos opciones:
Opción 1 ) Puede quitar el engranaje pequeño del servo, volver a alinear la dirección de la rueda delantera manualmente y luego instalar el engranaje pequeño en el servo de nuevo.
Opción 2) Puede cambiar el valor por defecto de la línea siguiente:
#define FRONT 90 // 90 degree means steering to front
Si su volante tiende a la izquierda, aumente el valor de 90 a 95,100,105 …
Si tu volante tiende a la derecha, disminuye el valor de 90 a 85,80,75 …
Ejecuta el sketch de nuevo hasta que tu volante finalmente mire hacia delante.
Entonces anota el valor FRONT, usaremos este valor para cambiar el código del sketch lesson3,4,5 y hacer que el servo de dirección siempre mire al frente con el valor FRONT por defecto.

1.Desconecte OSOYOO Basic Board for Arduino del PC y confirme que el interruptor de encendido del OSOYOO Motor Shield esté apagado, luego asegúrese de que la batería esté en la caja de baterías.
(Nota: asegúrese de que la dirección polar es correcta, de lo contrario puede destruir su dispositivo y causar peligro de incendio).
2. Coloque el auto en el suelo, encienda el interruptor de la caja de baterías y el protector de motor OSOYOO, el auto debería avanzar, retroceder, girar a la izquierda, girar a la derecha, retroceder, retroceder a la derecha, retroceder a la izquierda, luego detenerse.
Nota: Si el coche no se mueve según el resultado mencionado anteriormente, debe comprobar la conexión de los cables, los tapones de puente en OSOYOO Motor Shield, el voltaje de la batería (debe ser superior a 7,2v).
3. Si quieres cambiar el ángel de la derecha o de la izquierda, por favor edita la siguiente línea del código y sube el sketch de nuevo:
int RIGHT=FRONT+80;
int LEFT=FRONT-38;
4. Si quieres cambiar la velocidad del coche, por favor revisa el siguiente código del sketch (Nota: el valor máximo es 255)
#define SPEED 190
#define HI_SPEED 220