En esta lección, haremos un proyecto de conducción automática para evitar obstáculos. Usamos un módulo ultrasónico para “ver” el obstáculo, luego el robot dará la vuelta al obstáculo automáticamente.
Debe completar la Lección 1 antes de continuar con esta lección.
Descargar tutoriales en PDF: https://osoyoo.com/manual/2021006600.pdf
Video de instalacion del coche robot OSOYOO: https://osoyoo.com/manual/2021006600.html
– Chasis de auto robot OSOYOO Mecanum x1 – Ruedas y motores OSOYOO x4 (ruedas izquierdas x2/ruedas derechas x2) – Placa OSOYOO Mega2560 totalmente compatible con Arduino UNO x1 – Escudo OSOYOO Uart Wifi x1 – Placa de controladora OSOYOO modelo Y x1 – Medidor de voltaje OSOYOO x1 – Servomotor OSOYOO MG90 x 1 – Módulo de sensor ultrasónico OSOYOO x1 – Soporte de montaje OSOYOO x1 – Caja de batería OSOYOO x1 – Cable puente OSOYOO de 3 pines hembra a hembra x1 – Cable puente OSOYOOde 6 pines macho a hembra x2 – Cable puente OSOYOO de 10 pines macho a hembra x1 – Cable puente OSOYOO de 2 pines XH.25 hembra a hembra x1 – Baterías 18650 (3,7 V) x2 – Cargador de batería x1
1) Instale el módulo ultrasónico para montar el soporte con 4 tornillos M1.5*8 y tuercas M1.5.
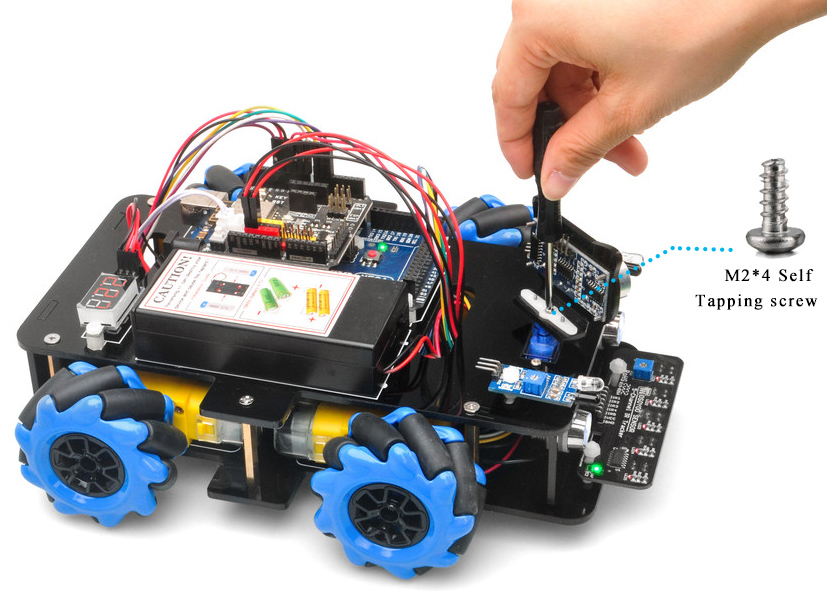
2) Instale el soporte de montaje para el módulo ultrasónico en el servomotor con tornillo autorroscante M2*4.
Coloque el ultrasónico por debajo, ya que los tornillos autorroscantes se quitan fácilmente. A. Apoye el motor desde abajo, ya que los tornillos autorroscantes se quitan fácilmente. B. No inserte el tornillo hasta después del proceso de alineación.
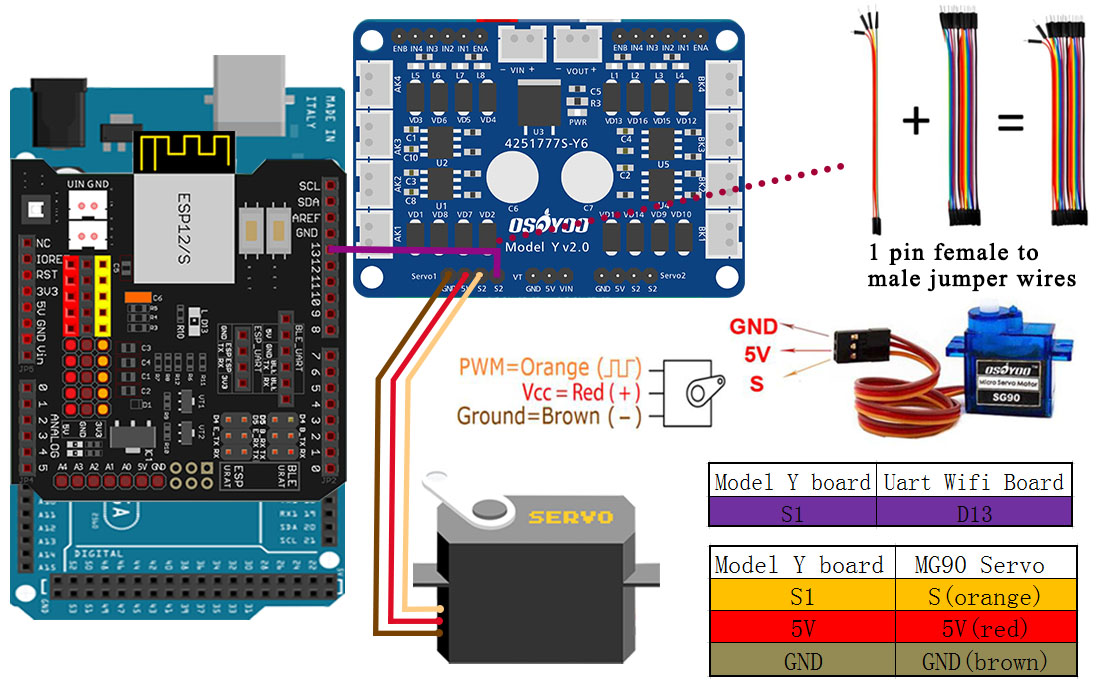
3) Mantenga todas las conexiones de la Lección 1 tal como están. Antes de conectar los cables, asegúrese de haber conectado el servomotor SG90 a la placa modelo Y y al escudo OSOYOO wifi uart de la siguiente manera:
(Nota: necesita dividir 1 pieza de cables de puente macho-hembra de nuestro paquete de cables de puente de 10 piezas. Cualquier color del paquete estará bien. El resto de los cables son piezas de repuesto para posibles cables rotos o dañados).
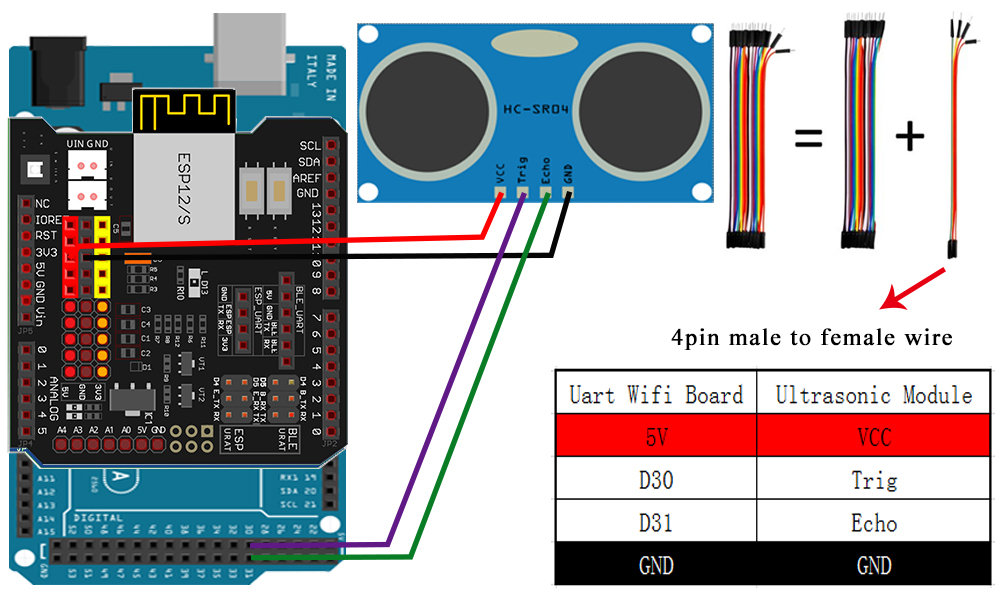
4)Conecte el módulo ultrasónico con el escudo OSOYOO Uart WiFi de la siguiente manera:
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descargue Arduino IDE desde https://www.arduino.cc/en/Main/Software?setlang=en, y luego instale el software.
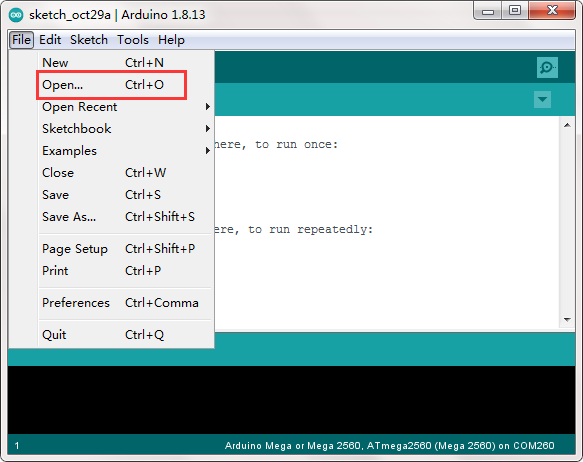
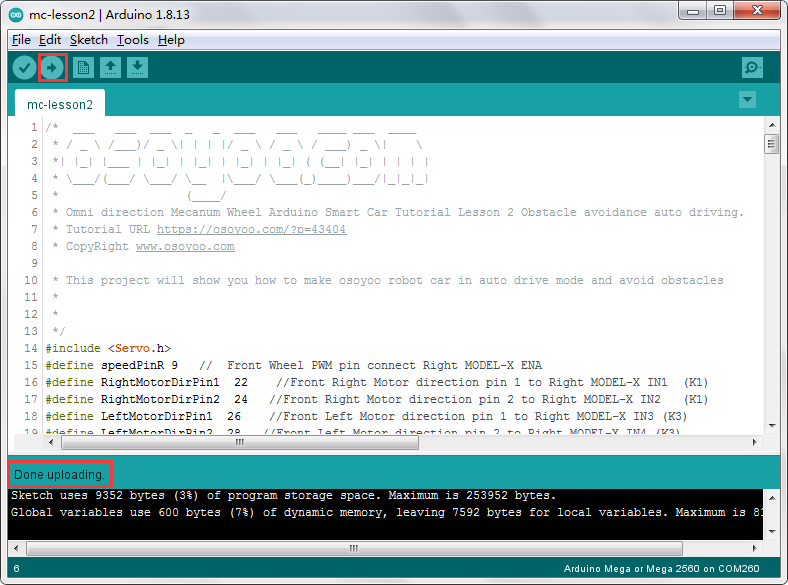
Paso 3: conecte la placa mega2560 a la PC con un cable USB, abra el IDE de Arduino -> haga clic en archivo -> haga clic en Abrir -> elija el código “lección 2.ino” en la carpeta lección 1, cargue el código en Arduino.
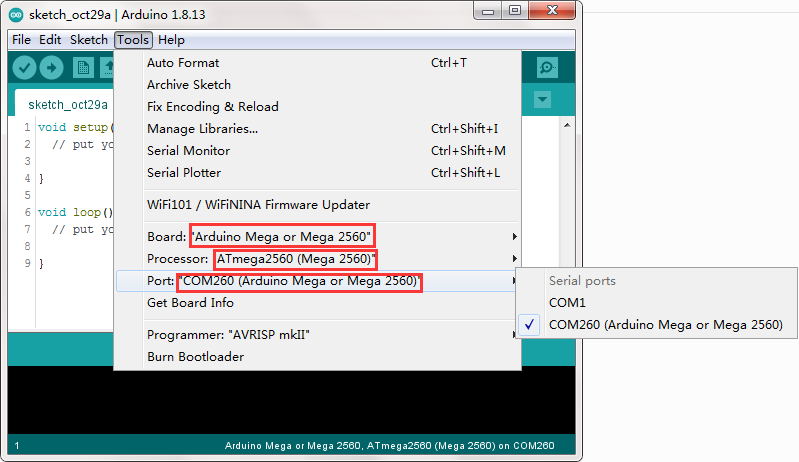
Paso 4: Elija la placa MEGA2560 como el tipo de placa y el puerto correcto para su proyecto como se muestra en la siguiente imagen, cargue el boceto en la placa.
Alineación de la dirección inicial del servo del sensor ultrasónico
Después de encender la batería, el servo hará algún movimiento y finalmente se detendrá en la dirección delantera durante 3 segundos.
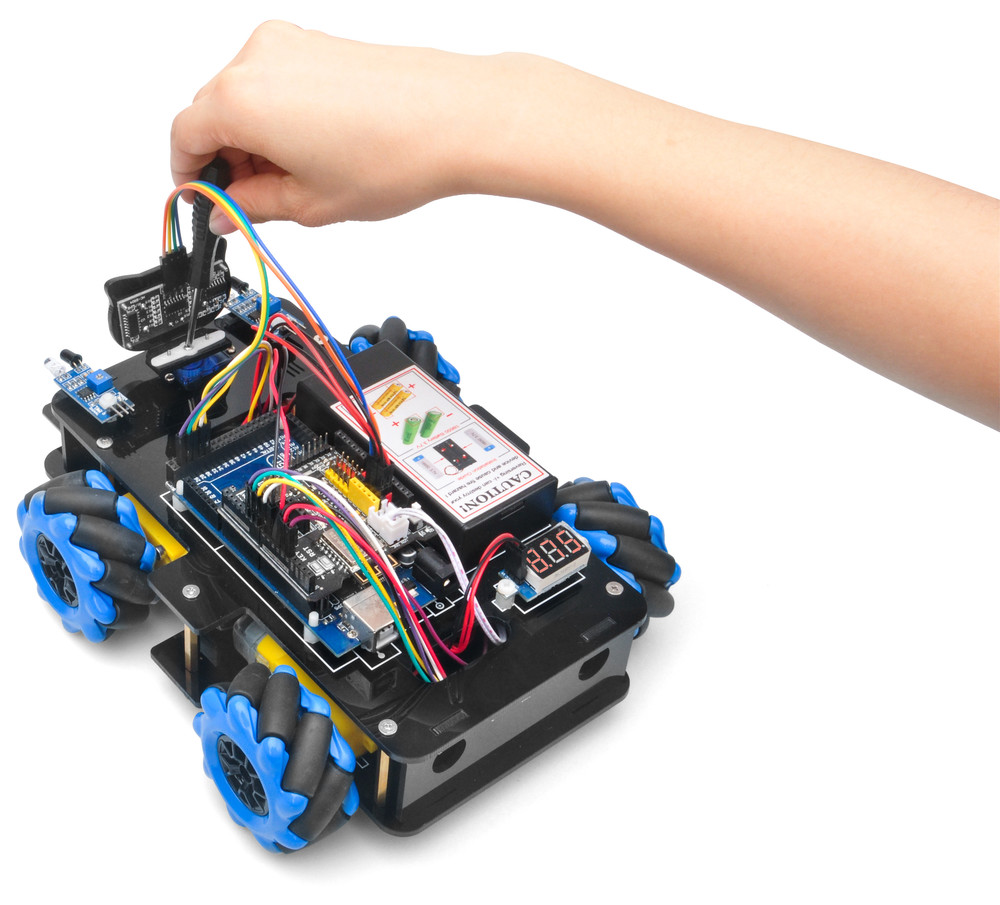
Si el sensor ultrasónico no mira hacia el frente durante los primeros 3 segundos, debe apagar la batería inmediatamente y quitar el sensor del servo, volver a instalarlo y colocarlo mirando hacia adelante como se muestra en la siguiente imagen. De lo contrario, el programa para evitar obstáculos no funcionará correctamente.
Después de ajustar la dirección del sensor, encienda la batería nuevamente, el sensor debe mirar hacia el frente como se muestra en la siguiente imagen. Si su dirección no es directa, apague la batería y vuelva a realizar la alineación de la dirección.
Pruebas finales:
Después de encender el interruptor de la batería en la caja de la batería, si el módulo ultrasónico cambia a la posición de vista frontal, eso significa que ya no necesita ajustar la posición del sensor. Sólo espere 3 segundos, si no se detecta ningún obstáculo, el robot avanzará. Si se detecta algún obstáculo, el Auto Robot se detendrá, el módulo ultrasónico girará de derecha a izquierda para detectar los obstáculos. El robot decidirá girar a la izquierda, a la derecha o hacia atrás de acuerdo con los datos del sensor de obstáculos y nuestro algoritmo para evitar obstáculos.
A veces, su robot puede tener una colisión y hacer que la posición de su sensor ultrasónico cambie, debe recordar hacer la correcta alineación de la dirección del sensor nuevamente según el enlace Alineación de la dirección inicial del servo del sensor ultrasónico.












Thank You!