In questo progetto, usiamo il sensore di tracciamento (bianco/nero) per progettare una semplice auto Robot segui linea.
Un Line Follower Robot, come suggerisce il nome, è un veicolo a guida automatica che segue una linea nera stampata sul terreno bianco. I sensori di tracciamento nel robot continuano a controllare se la posizione attuale dell’auto è fuori dalla traccia. Se sì, allora l’auto farà un movimento negativo per riportare l’auto robotica in pista.
OSOYOO Basic Board for Arduino (Totalmente compatibile con Arduino UNO rev.3) x 1
OSOYOO Magic I/O Shield per Arduino x1
OSOYOO Tracking Sensor Module x1
OSOYOO Cavo 3-Pin PNP 10cm x 6
OSOYOO Cavo 3-Pin PNP 20cm x 2
OSOYOO Cavo 4-Pin PNP 20cm x 1
Piattaforma in Acrilico x1
motore di trasmissione con due ruote
Cavo USB
Installare la struttura di base della smart car come da Lezione 21, se avete già completato l’installazione nella Lezione 23, non modificatela.
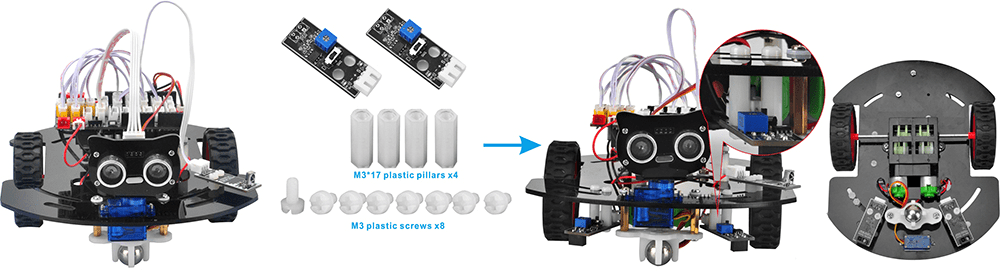
Fase 1:Installare il sensore di tracciamento sinistro e destro con viti di plastica M3*6, colonne di plastica M3*17. Assicurarsi che ogni testa del potenziometro sia tra le fessure sul lato anteriore del telaio dell’auto in modo da ottenere il miglior stato di sensibilità: il segnale indicare la luce LED si accende quando il sensore è sopra la terra bianca, e il segnale LED si spegne quando il sensore è sopra la pista nera.
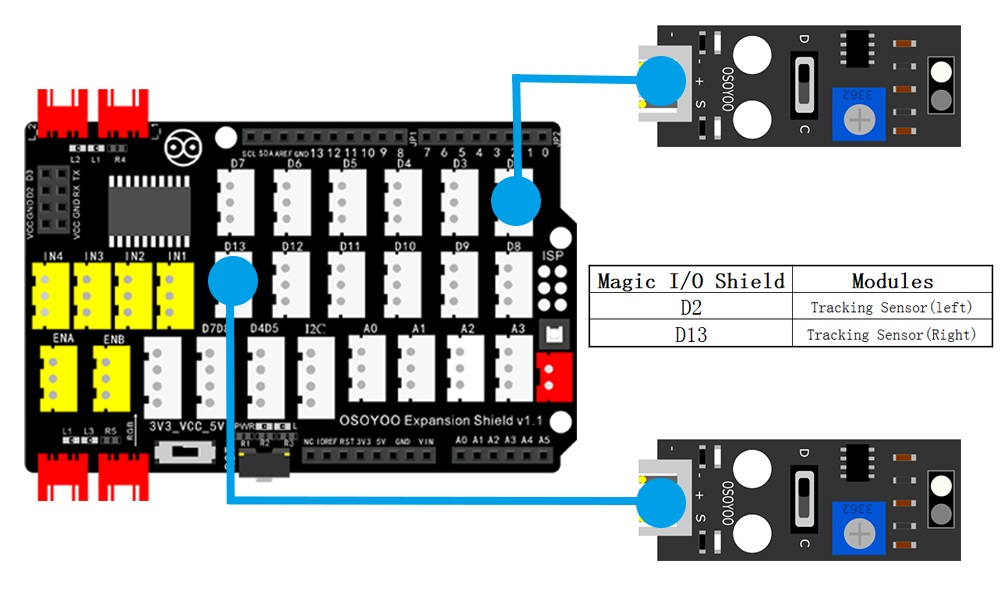
Fase 2:Quindi collegare i sensori di tracciamento sinistro e destro alla porta D2 e D3 dello shield Magic I/O con un cavo PNP a 3 pin come sotto:
Avviso: Togliere la batteria o scollegare l’adattatore di alimentazione quando si carica il codice dello sketch su OSOYOO Scheda base per Arduino.
Dopo che le operazioni di cui sopra sono state completate, connetti la OSOYOO Scheda base per Arduino al tuo computer usando il cavo USB. Il LED verde di alimentazione (etichettato PWR) dovrebbe accendersi.
Puoi scaricare il codice direttamente, poi clicca su ” Open ” in Mixly per scegliere il codice che hai scaricato:
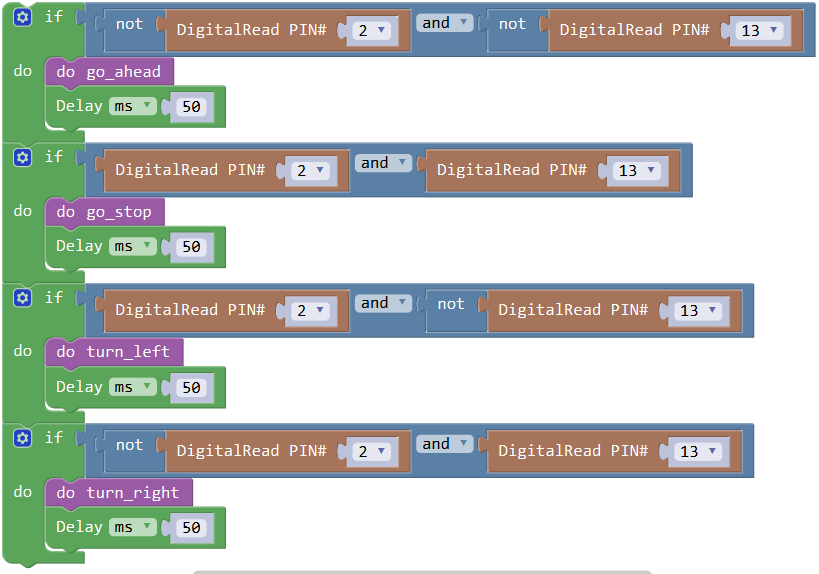
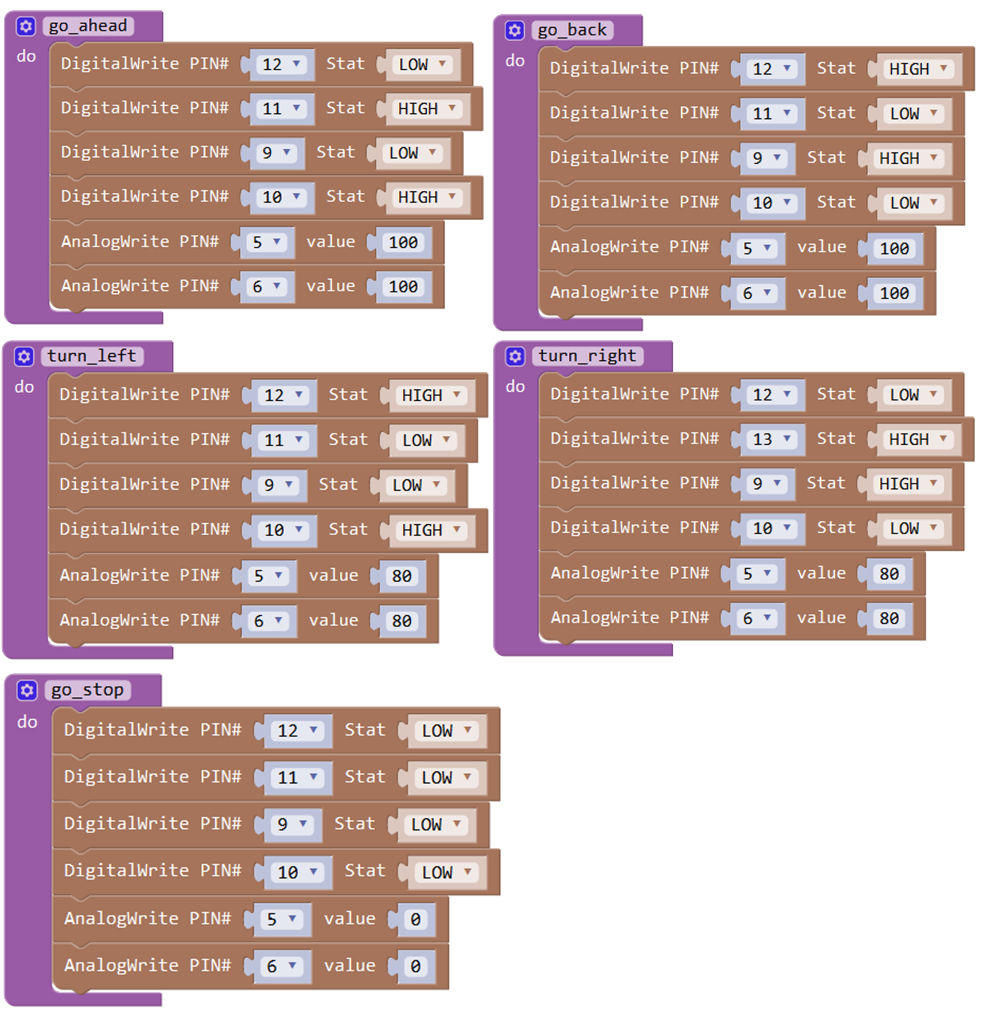
Aprire il software di programmazione grafica Mixly e fare le seguenti operazioni grafiche. Infine, salvare e caricare il programma sulla OSOYOO Scheda base per Arduino.
Nella lezione 20 abbiamo imparato a regolare la sensibilità e a utilizzare il sensore di tracciamento.
Regolare la sensibilità dei moduli del sensore di tracciamento. Accendi e tieni ferma la macchina e regola il potenziometro sul sensore di tracciamento con un cacciavite a croce fino ad ottenere il miglior stato di sensibilità: la luce del LED di segnalazione si accenderà quando il sensore è sopra il terreno bianco, e il LED di segnalazione si spegnerà quando il sensore è sopra la pista nera.
Preparare una pista nera (la larghezza della pista nera è più di 30mm e meno di 60mm) in terreno bianco. Si prega di notare che l’angolo di svolta (curva di curvatura) della pista non può essere a gomito (più grande di 90 gradi). Se la svolta è troppo brusca, l’auto uscirà dalla pista.
Accendete l’auto e mettete il centro del modulo sensore di tracciamento rivolto verso la pista nera, e poi l’auto si muoverà lungo la pista nera.