In questa lezione, realizzeremo un progetto di guida autonoma con evitamento degli ostacoli. Utilizzeremo un modulo ad ultrasuoni per “vedere” l’ostacolo e l’auto girerà automaticamente intorno all’ostacolo.
Prima di proseguire con questa lezione, devi completare la lezione 1.
Video di installazione della macchina robotica OSOYOO: https://osoyoo.com/manual/2021006600.html
OSOYOO Telaio della macchina robotica con ruote mecanum x1
Ruote e motori OSOYOO x4 (ruote sinistra x2/ruote destra x2)
Scheda OSOYOO Mega2560, completamente compatibile con Arduino UNO/Mega2560 x1
Shield Wi-Fi Uart OSOYOO x1
Scheda di controllo OSOYOO Model Y x1
Voltmetro OSOYOO x1
Servomotore OSOYOO MG90 x1
Modulo sensore ad ultrasuoni OSOYOO x1
Supporto di montaggio OSOYOO x1
Scatola per batterie OSOYOO x1
Cavo a tre pin femmina-femmina OSOYOO x1
Cavo a sei pin maschio-femmina OSOYOO x2
Cavo a dieci pin maschio-femmina OSOYOO x1
Cavo a due pin XH.25 femmina-femmina OSOYOO x1
Batterie 18650 (3,7 V) x2
Caricabatterie x1
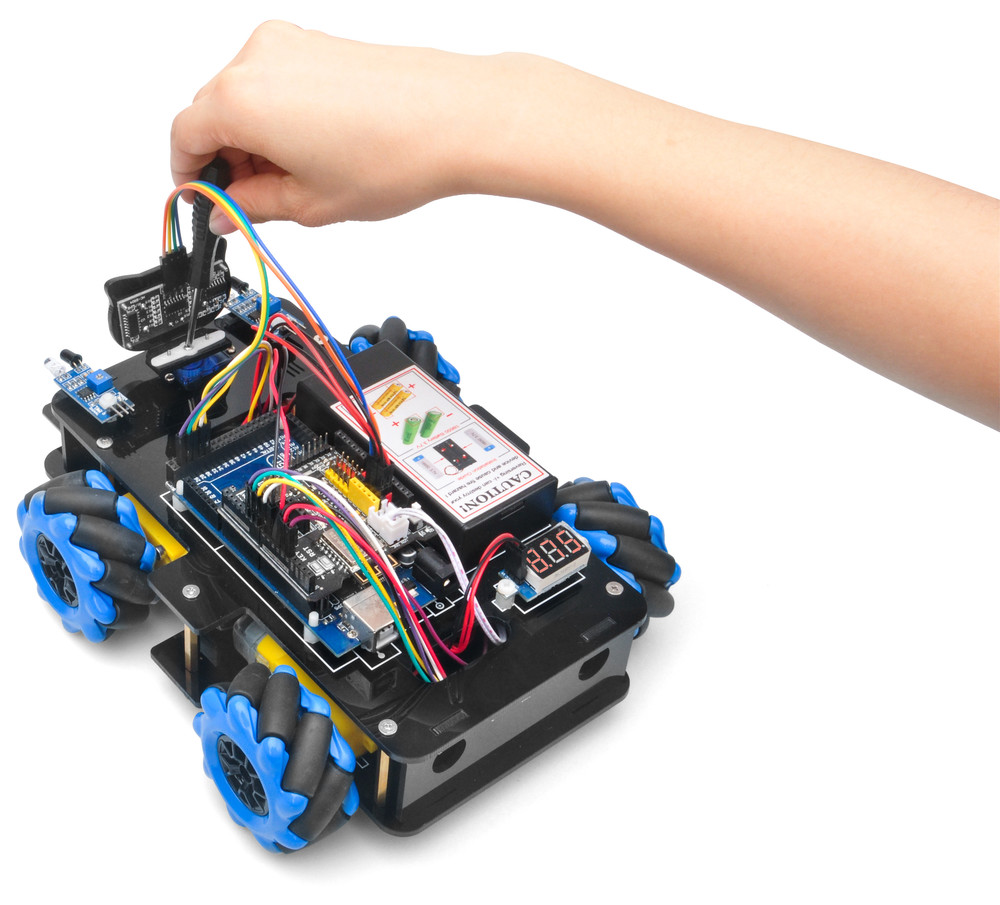
1)Installare il modulo ad ultrasuoni sul supporto di montaggio con 4 viti M1.5*8 e dadi M1.5.
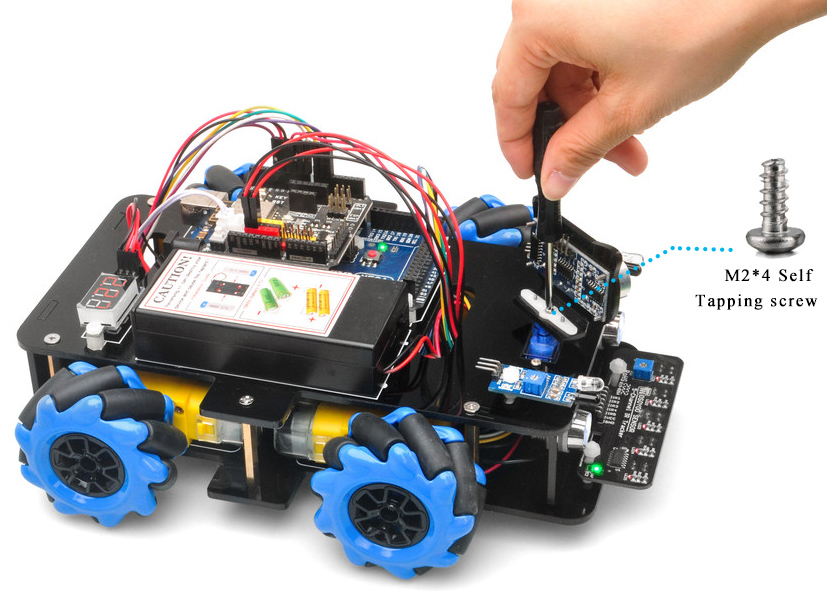
2)Installare il supporto di montaggio per il modulo ad ultrasuoni sul servomotore con una vite autofilettante M2*4.
Quando si posiziona il modulo ad ultrasuoni sotto, poiché le viti autofilettanti possono facilmente rovinarsi.
A. Supportare il motore dal basso, poiché le viti autofilettanti possono facilmente rovinarsi.
B. Non inserire la vite fino al termine del processo di allineamento.
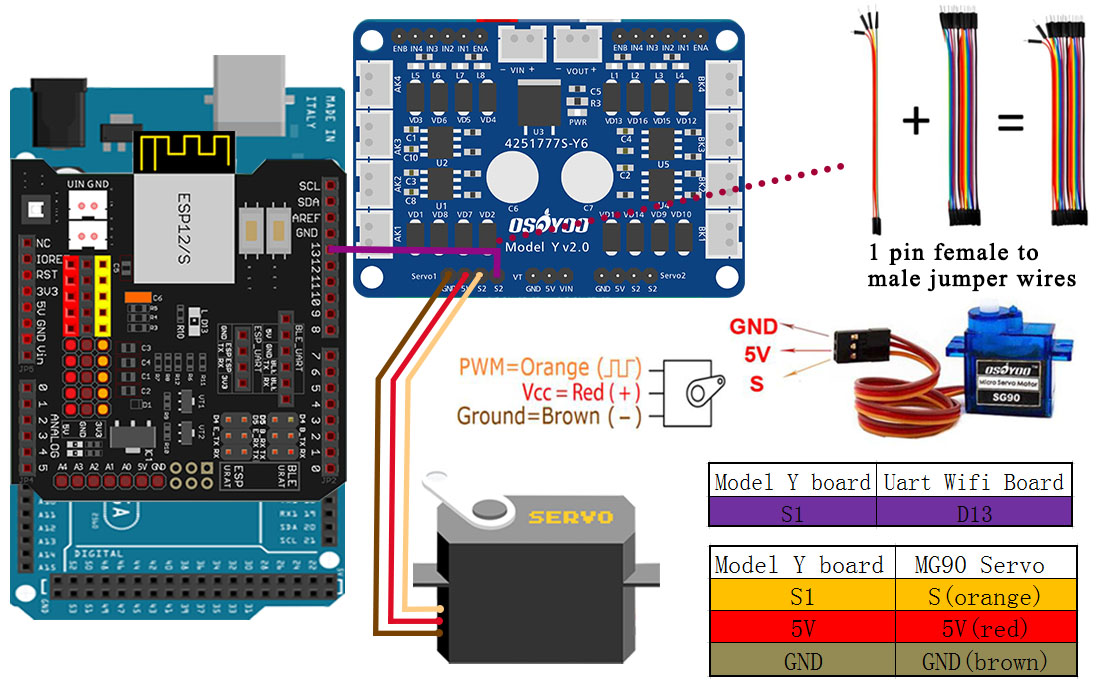
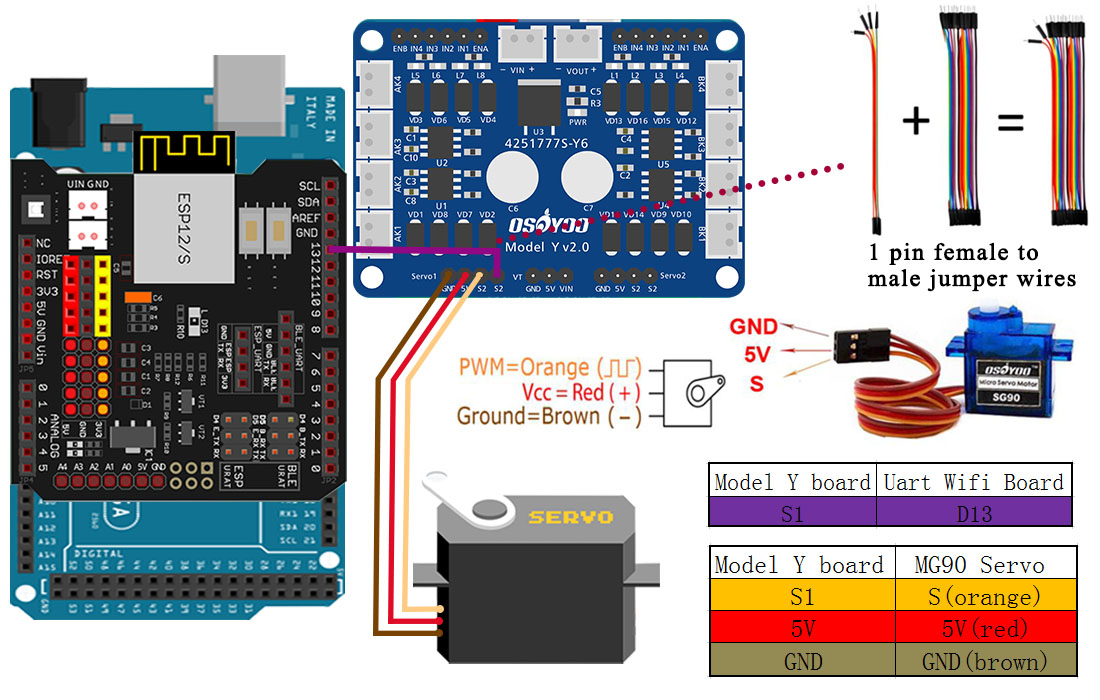
3)Please keep all lesson 1 connections same as it is. Before connecting wires, make sure that you have connect SG90 servo motor to model Y board and OSOYOO Uart Wi-Fi shield as follows.
Note: You need to split 1 pcs of male-to-female jumper wires from our 10-pc jumper wire bundle. Any color from the bundle will be ok. The rest wires are as spare parts for potential broken or damaged wires.
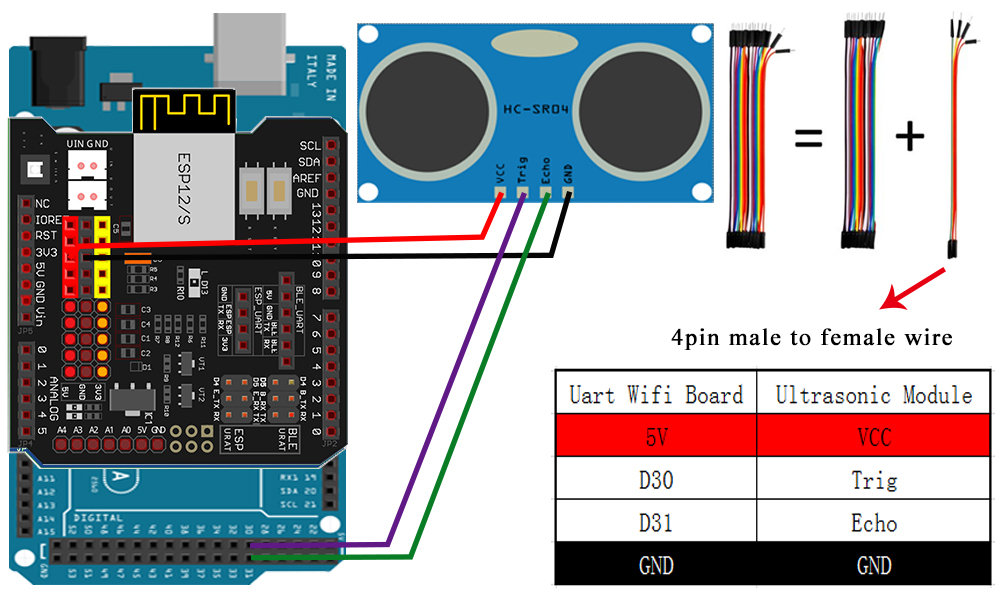
4)Collegare il modulo ad ultrasuoni allo shield OSOYOO Uart Wi-Fi come segue.
Passo 1: Installa l’ultima versione dell’IDE Arduino (Se hai già la versione dell’IDE Arduino successiva alla 1.1.16, salta questo passo). Scarica l’IDE Arduino da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installa il software.
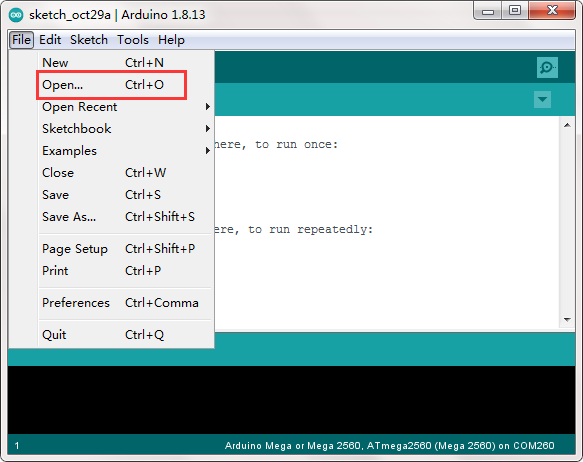
Passo 3: Collega la scheda Mega2560 al PC tramite cavo USB, Apri Arduino IDE → clicca su File → clicca su Apri → scegli il codice “lesson2.ino” nella cartella lesson1, carica il codice nell’Arduino.
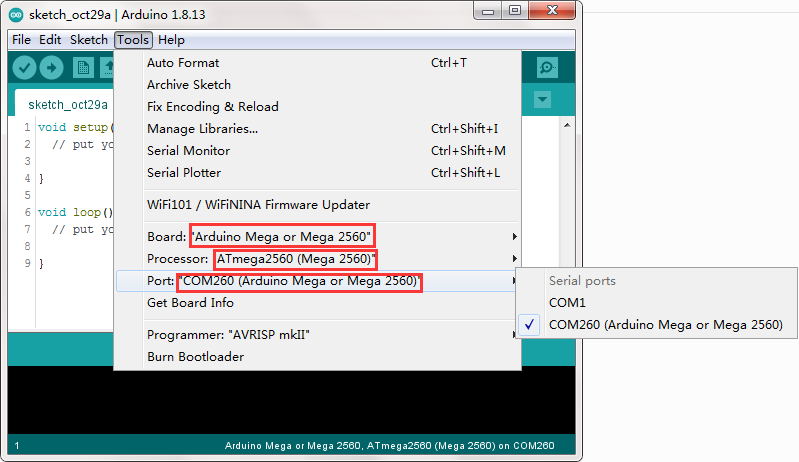
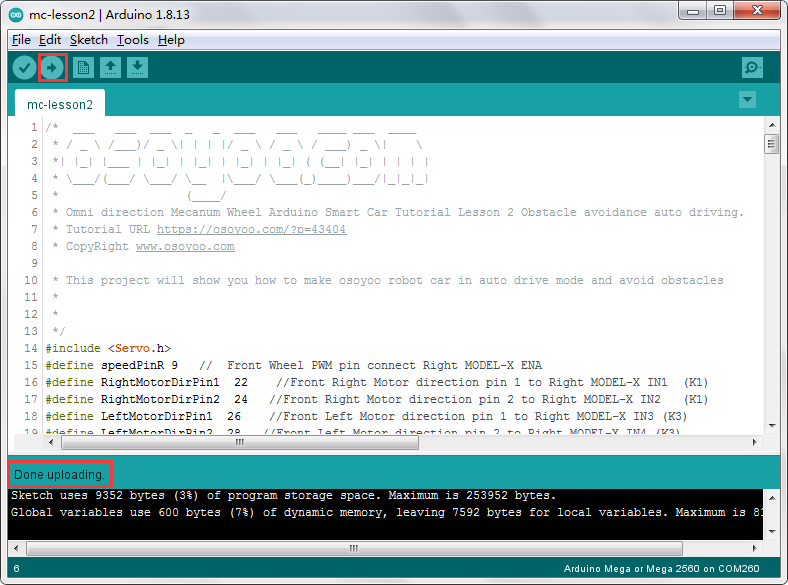
Passo 4: Seleziona la scheda MEGA2560 come tipo di scheda e la porta corretta per il tuo progetto come mostrato nella seguente immagine, carica lo sketch sulla scheda.
Allineamento iniziale della direzione del sensore ad ultrasuoni servo
Dopo aver acceso la batteria, il servo compirà alcuni movimenti e si fermerà infine nella direzione frontale per 3 secondi.
Se il sensore ad ultrasuoni non è rivolto in avanti durante questi primi 3 secondi, è necessario spegnere immediatamente la batteria, rimuovere il sensore dal servo, reinstallarlo e posizionarlo rivolto verso la direzione retta in avanti come mostrato nella seguente immagine. In caso contrario, il programma di evitamento degli ostacoli non funzionerà correttamente.
Dopo aver regolato la direzione del sensore, riaccendere la batteria e il sensore dovrebbe essere rivolto in avanti come mostrato nella seguente immagine. Se la sua direzione non è diritta in avanti, spegnere la batteria e riallineare la direzione nuovamente.
Test finale :
Dopo aver acceso l’interruttore della batteria sulla scatola delle batterie, se il modulo ad ultrasuoni si posiziona frontalmente, significa che non è necessario regolare ulteriormente la posizione del sensore. Basta attendere 3 secondi. Se non viene rilevato alcun ostacolo, l’auto proseguirà in avanti. Se vengono rilevati ostacoli, l’auto si fermerà, il modulo ad ultrasuoni si muoverà da destra a sinistra per rilevare gli ostacoli circostanti. La macchina robotica deciderà di svoltare a sinistra, a destra o indietro in base ai dati del sensore degli ostacoli e al nostro algoritmo di evitamento degli ostacoli.
A volte la tua auto potrebbe avere una collisione e far cambiare la posizione del tuo sensore ad ultrasuoni, devi ricordarti di ripetere l’allineamento della direzione del sensore come indicato nel link “Allineamento iniziale della direzione del sensore ad ultrasuoni servo.
Risoluzione dei problemi
A volte, quando esegui il codice di esempio della lezione 2, potresti notare che l’auto si muove all’indietro anche se non c’è alcun ostacolo di fronte. Questo di solito significa che c’è un problema nell’installazione del sensore ad ultrasuoni o nella connessione dei cavi. Per risolvere il problema, controlla l’installazione hardware passo 4.
Utilizza 4 nuovi cavi jumper per collegare il sensore alla scheda Arduino Wi-Fi, assicurati che:
Il pin VCC del sensore ad ultrasuoni sia collegato al pin 5V della scheda Wi-Fi.
Il pin TRIG del sensore ad ultrasuoni sia collegato al pin D30 della scheda Wi-Fi.
Il pin ECHO del sensore ad ultrasuoni sia collegato al pin D31 della scheda Wi-Fi.
Il pin GND del sensore ad ultrasuoni sia collegato al pin GND della scheda Wi-Fi
Dopo aver correttamente collegato i cavi del sensore seguendo le istruzioni precedenti, puoi effettuare un test del sensore.
Per favore, scarica il codice di test del sensore di distanza da https://osoyoo.com/download/code/distance.zip, mantieni il tuo Arduino e il PC collegati con il cavo blu e quindi esegui il codice distance.ino.
Ora apri il monitor seriale dell’IDE Arduino, metti la tua mano di fronte al sensore,
Dovresti vedere un valore di distanza nel monitor seriale. Quel valore rappresenta la distanza tra la tua mano e il sensore.
Se vedi solo il valore 0 nel monitor seriale, significa che la connessione dei cavi del sensore è errata, il cavo potrebbe essere danneggiato o il sensore potrebbe essere difettoso. Potresti dover sostituire i 4 cavi con dei nuovi o contattare il supporto OSOYOO per la sostituzione del sensore.













Thank You!