In questa lezione, utilizzeremo un’app mobile per controllare la nostra auto robot e fare una guida simulata. Poiché si tratta di una guida simulata, utilizzeremo un volante virtuale e una leva del cambio nell’app per imitare i loro corrispettivi nella vera auto.
Telaio per auto robot con ruote mecanum OSOYOO x1
Ruote e motori OSOYOO x4 (ruote sinistre x2/ruote destre x2)
Scheda OSOYOO Mega2560, completamente compatibile con Arduino UNO/Mega2560 x1
Shield Wi-Fi OSOYOO Uart x1
Scheda driver OSOYOO Model Y x1
Voltmetro OSOYOO x1
Moduli Bluetooth OSOYOO x1
Scatola delle batterie OSOYOO x1
Cavo jumper femmina-femmina a 3 pin OSOYOO x1
Cavo jumper maschio-femmina a 6 pin OSOYOO x2
Cavo jumper maschio-femmina a 10 pin OSOYOO x1
Cavo XH.25 femmina-femmina a 2 pin OSOYOO x1
Batterie 18650 (3,7V) x2
Caricabatterie x1
Passaggio 1: Devi completare la lezione 1 (assemblaggio dell’auto) prima di proseguire con questa lezione.
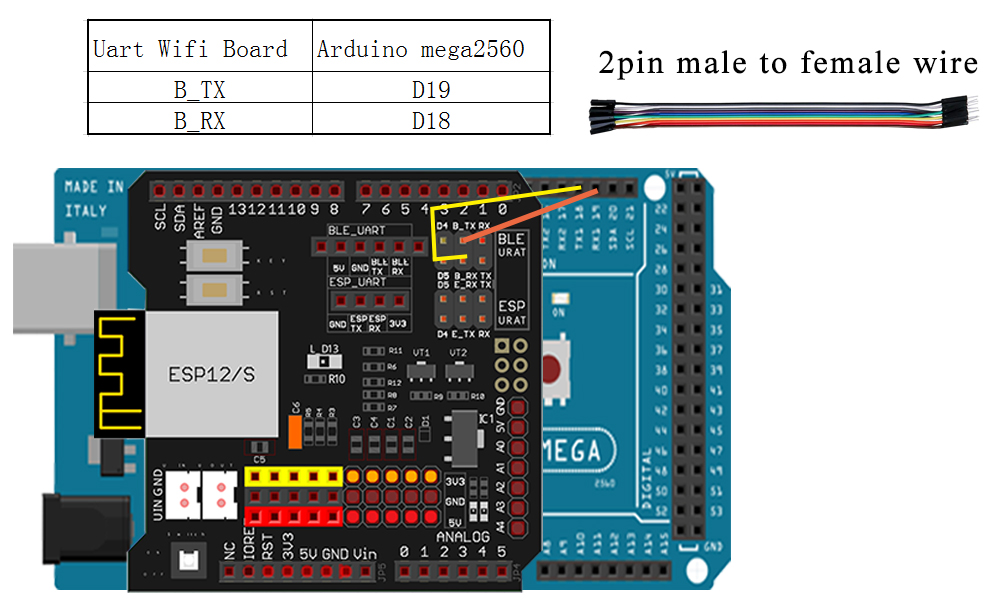
Passaggio 2: Collega i porti Bluetooth TX/RX ai pin D19, D18 utilizzando cavi jumper. (Nota: Dovrai dividere 2 cavi jumper maschio-femmina dal nostro pacchetto di cavi jumper da 10 pezzi. Qualsiasi colore del pacchetto andrà bene. Gli altri 8 cavi sono pezzi di ricambio nel caso si rompano o si danneggino.)
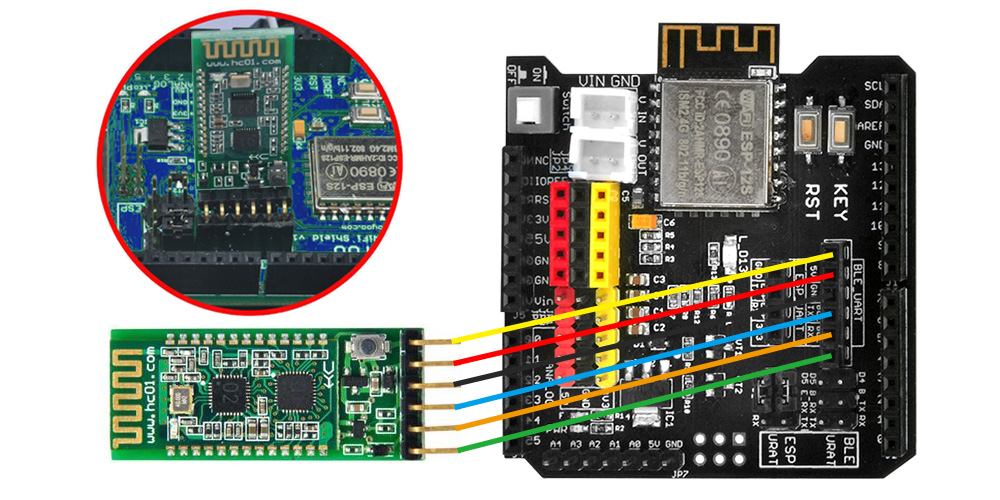
Passaggio 3: Il modulo Bluetooth deve essere inserito nello slot Bluetooth a 6 pin nella scheda Wi-Fi OSOYOO.
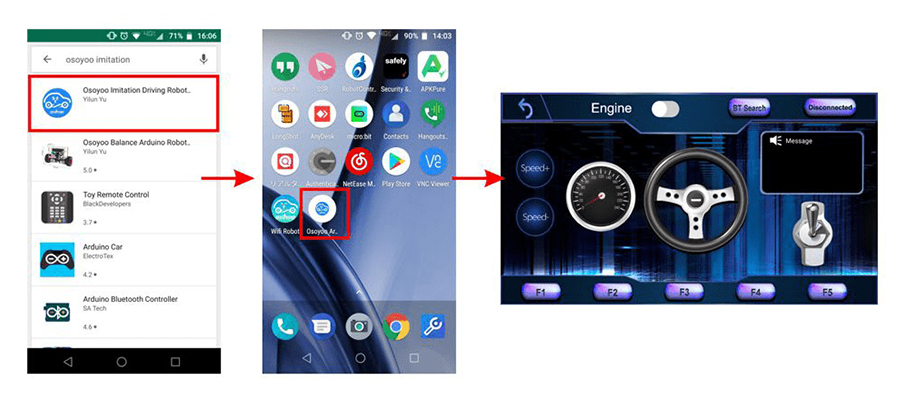
Passaggio 4: APP mobile:
Vai su Google Play o sull’App Store di Apple e cerca il nome dell’app “OSOYOO imitation driving”. Scarica l’app come segue e installala sul tuo smartphone.
Collega HC-02 Bluetooth al telefono Android. Nell’app Android c’è un pulsante “BT Search”: quando si clicca su questo pulsante, verrà visualizzato un elenco dei dispositivi Bluetooth che sono stati abbinati all’app. Seleziona il dispositivo HC-02 per connettere l’auto. Una volta che HC-02 è connesso, lo stato del Bluetooth passerà da “Disconnesso” a “Connesso”. Puoi controllare l’auto solo quando il Bluetooth è connesso.
Collega HC-02 Bluetooth su iPhone/iPad, semplicemente clicca sul pulsante “Connetti”, apparirà un dispositivo HC-02 in un elenco a comparsa. Clicca su quel dispositivo HC-02 per connettere il modulo Bluetooth al tuo iPhone. A questo punto, il pulsante “Connetti” cambierà nome in “Disconnetti”.
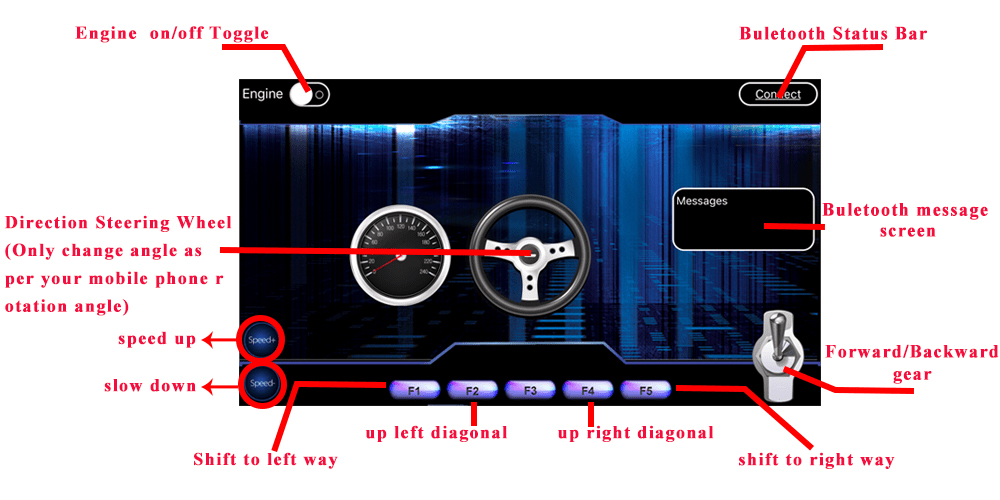
Interruttore del motore : Quando l’interruttore del motore è impostato su OFF (bianco), l’auto si fermerà e tutti i pulsanti nell’app saranno disabilitati. Quando l’interruttore del motore è impostato su ON (rosso), l’auto inizierà a muoversi. Tutti gli altri pulsanti di controllo del movimento verranno attivati.
Interruttore della marcia avanti/indietro: Questo interruttore della marcia può controllare se l’auto si sta muovendo in avanti o indietro, come la marcia di una vera auto.
Pulsanti personalizzati F1, F2, F3, F4, F5: In questa lezione, useremo solo il pulsante F3, che mette in pausa il movimento dell’auto. La differenza tra il pulsante F3 e l’interruttore del motore OFF è che quando si tocca il pulsante del motore OFF, tutti gli altri pulsanti saranno disabilitati. Dovrai premere nuovamente l’interruttore del motore per abilitare gli altri pulsanti. D’altra parte, quando si fa clic su F3, l’auto si fermerà, ma tutti gli altri pulsanti saranno ancora attivi. Premi F1 per spostarti a sinistra, F2 per diagonale in alto a sinistra, F3 per mettere in pausa, F4 per diagonale in alto a destra, F5 per spostarsi a destra.
Volante di direzione : Quando ruoti l’angolo del tuo telefono cellulare, il volante si orienterà in base all’angolo di rotazione del tuo telefono. Questo farà cambiare direzione all’auto. Ad esempio, quando il volante ruota in senso orario, l’auto si sposterà a sinistra. Ricorda, il volante e l’interruttore della marcia avanti/indietro devono lavorare insieme, proprio come quando guidi una vera auto. Ad esempio, quando vuoi fare retromarcia per parcheggiare a destra, devi impostare la marcia sulla posizione R e ruotare il volante in senso antiorario.
Passaggio 1: Installa l’ultima versione dell’IDE di Arduino (Se hai una versione successiva alla 1.1.16, salta questo passaggio). Scarica l’IDE di Arduino da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installa il software.
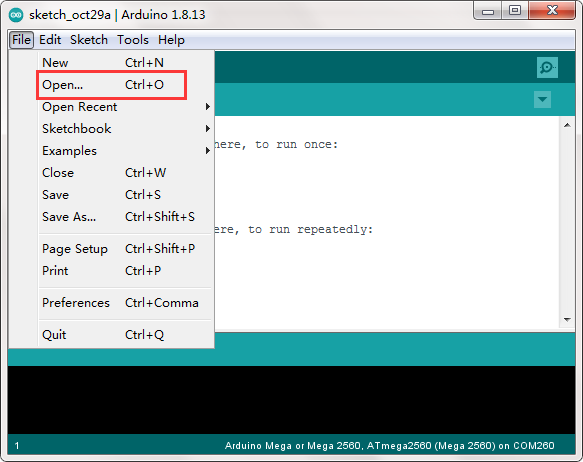
Passaggio 3: Collega la scheda Mega2560 al PC con il cavo USB, Apri l’IDE di Arduino → clicca su File → clicca su Apri → scegli il codice “lesson5.ino” nella cartella lesson5, carica il codice nell’Arduino.
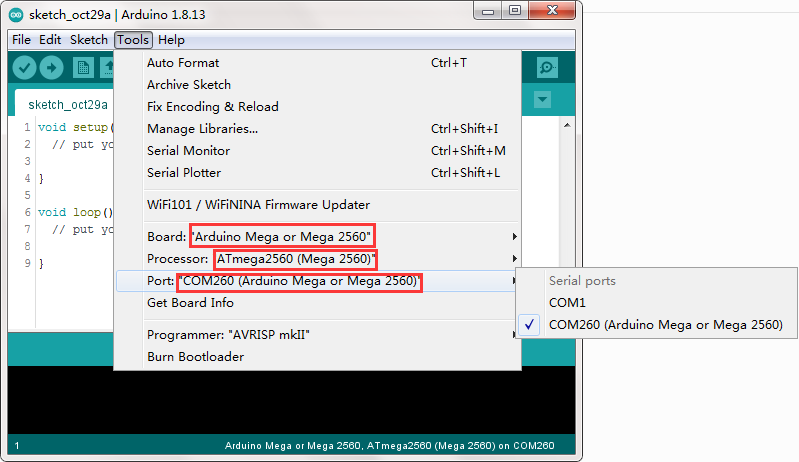
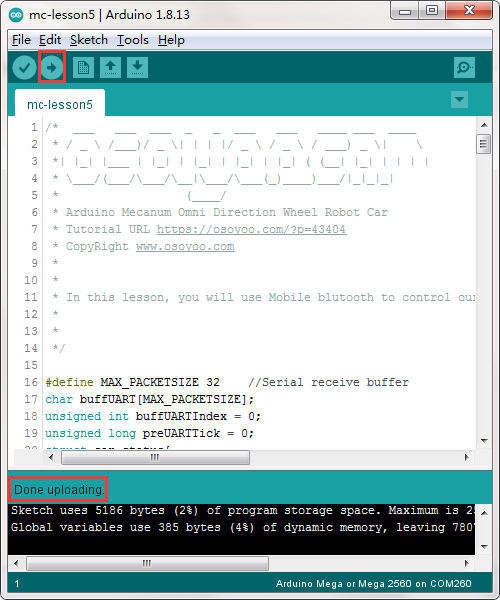
Passaggio 4: Scegli la scheda/porta corrispondente al tuo progetto, carica lo sketch sulla scheda.
Ora hai installato l’hardware e il software per questa lezione, guidiamo la nostra auto!!
Passaggio 1: Metti la tua auto robot a terra e accendi l’interruttore.
Passaggio 2: Vai sul tuo telefono cellulare → Impostazioni → Impostazioni Bluetooth e cerca un dispositivo Bluetooth chiamato HC-02, accoppialo con il codice 1234.
Connessione con dispositivo Android:
Se stai utilizzando un dispositivo Android e non hai abbinato il modulo Bluetooth al tuo cellulare, abbinare prima il modulo Bluetooth prima di aprire l’app. Nelle impostazioni del cellulare → Bluetooth, cerca un dispositivo Bluetooth chiamato HC02, abbinalo con la password 1234. Dopo che il dispositivo Bluetooth HC02 è stato abbinato, apri l’app. Clicca sul pulsante “BT Search” per connettere l’app al dispositivo HC02.
Connessione con dispositivo iOS: Se stai utilizzando un dispositivo iOS, apri semplicemente l’app, clicca sul pulsante “Connetti” e vedrai un elenco Bluetooth, seleziona il dispositivo HC02.
Passaggio 3: Apri l’app OSOYOO Imitation Driving Robot, clicca sul pulsante “BT Search” e trova il dispositivo Bluetooth che hai abbinato
Passaggio 4: Accendi l’interruttore del motore, clicca su “Speed+” per aumentare la velocità del robot, poiché l’auto robot è molto lenta all’inizio. Quando ruoti l’angolo del tuo telefono cellulare, la tua auto cambierà direzione.
Passaggio 5: Clicca sul pulsante della marcia per passare alla direzione Avanti o Indietro.
Passaggio 6: Premi F1 per spostarti a sinistra, F5 per spostarti a destra, F2 per diagonale in alto a sinistra, F4 per diagonale in alto a destra, F3 per mettere in pausa.
Regolazione della velocità del motore per una migliore prestazione
Per ottenere un risultato migliore in termini di prestazioni di corsa, il valore della potenza del motore (velocità) dovrebbe essere regolato correttamente in base al livello della batteria. Se il valore della potenza del motore (velocità) è troppo alto, la tua auto potrebbe correre troppo velocemente e risultare difficile da controllare. Se la potenza del motore (velocità) è troppo bassa, l’auto potrebbe non muoversi affatto.
Per regolare il valore della potenza del motore, è necessario modificare le 3 costanti nella riga 27, 28, 29 nel file di sketch mecanum-2560-lesson4.ino:
MIN_SPEED è la potenza minima richiesta per avviare l’auto. Se quando l’interruttore del motore dell’app viene commutato su ROSSO, ma la tua auto non si muove, devi aumentare questo valore, se l’auto corre troppo velocemente all’avvio del motore, devi ridurre questo valore.
Il valore TURN_SPEED e SLOW_TURN_SPEED determina la velocità di svolta della tua auto. Se la tua auto gira troppo velocemente, devi ridurre questi due valori, se gira troppo lentamente o non gira, aumenta questi due valori. Assicurati sempre che SLOW_TURN_SPEED sia circa 20-30 inferiore al valore di TURN_SPEED.
Il valore BACK_SPEED determina la velocità di retromarcia.
Dopo che le batterie si sono scaricate, potrebbe essere necessario aumentare il valore di queste 3 costanti. Puoi gradualmente aggiungere o ridurre 10 ogni volta su questi valori e confrontare quali valori offrono la migliore performance di tracciamento.