Mecanum Wheel Robot Car Pacchetto completo (con batterie 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In questa lezione useremo Mobile per controllare la nostra auto robotica e imitare la guida. Poiché è una simulazione di guida, utilizzeremo un volante e una marcia virtuali nella nostra APP per imitare le loro controparti nell’auto reale.
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 ruote a sinistra / 2 ruote a destra e motore x 4)
Scheda OSOYOO Mega2560, completamente compatibile con Arduino x 1
Schermatura Wi-Fi OSOYOO x 1
Driver del motore OSOYOO modello Y x 1
Modulo Bluetooth OSOYOO HC02
Servomotore OSOYOO MG90 x 1
Modulo sensore ad ultrasuoni OSOYOO x1
OSOYOO Supporto per montaggio ad ultrasuoni
Scatola batteria OSOYOO x 1
OSOYOO ponticello da 3 pin femmina a femmina x1
OSOYOO 6 pin maschio a ponticello femmina x2
OSOYOO 2 pin XH.25 da femmina a femmina x1
OSOYOO ponticello a 10 pin da maschio a femmina x1
18650 batterie (3,7 V) x 2
Devi completare la lezione 1 (assemblaggio dell’auto) prima di continuare con questa lezione. Non c’è bisogno di cambiare nulla, mantieni la connessione del cavo hardware così com’è.
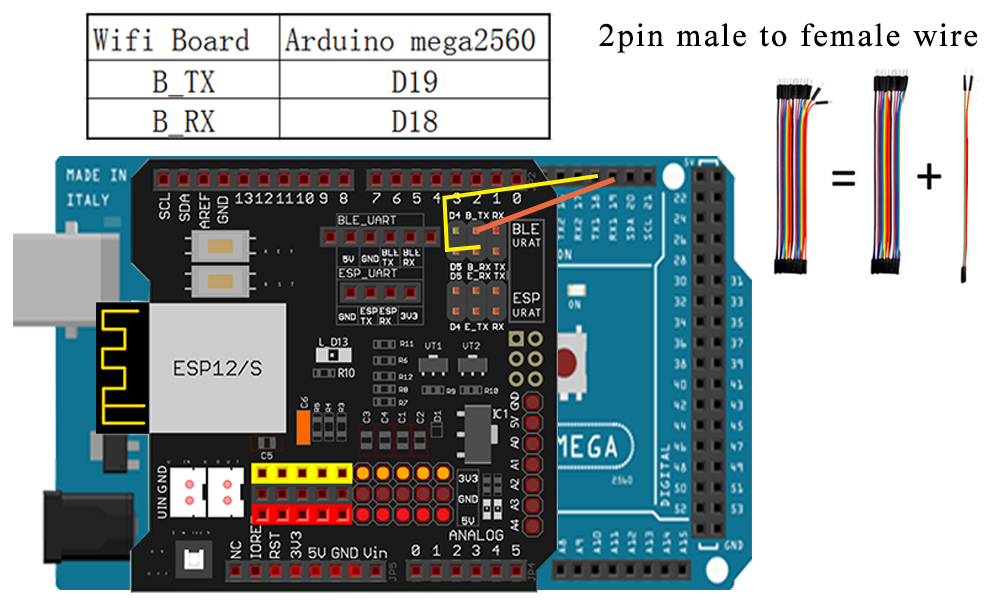
Passaggio 1: collegare B_TX e B_RX a D19 e D18.
(Nota: è necessario dividere 2 pezzi di cavi jumper maschio-femmina dal nostro fascio di cavi jumper da 10 pezzi. Qualsiasi colore dal pacchetto andrà bene. Il resto dei cavi da 8 pezzi sono come pezzi di ricambio per potenziali rotture o danni fili.)
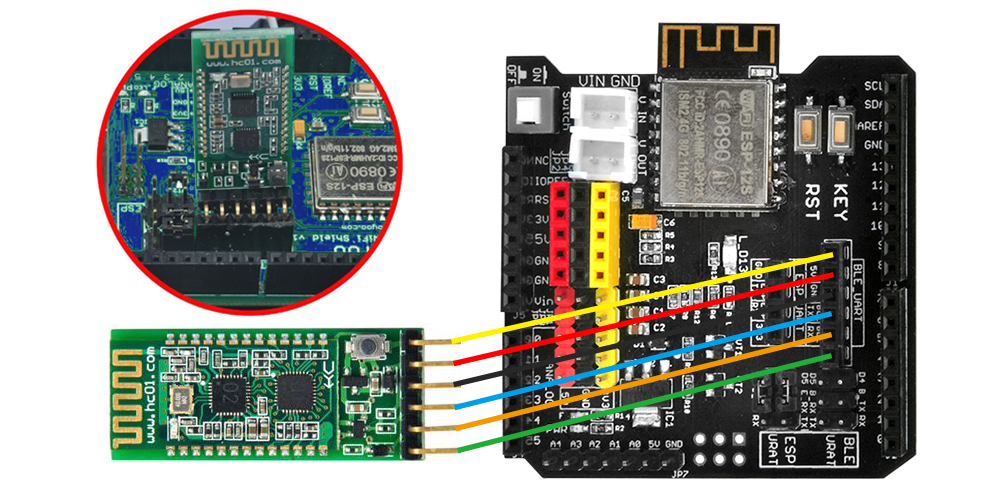
Passaggio 2: il modulo Bluetooth deve essere inserito nello slot Bluetooth a 6 pin nella scheda Wi-Fi OSOYOO.
Passaggio 1: installare l’ultimo IDE di Arduino (se si dispone di una versione dell’IDE di Arduino successiva alla 1.1.16, saltare questo passaggio). Scarica Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en, quindi installare il software.
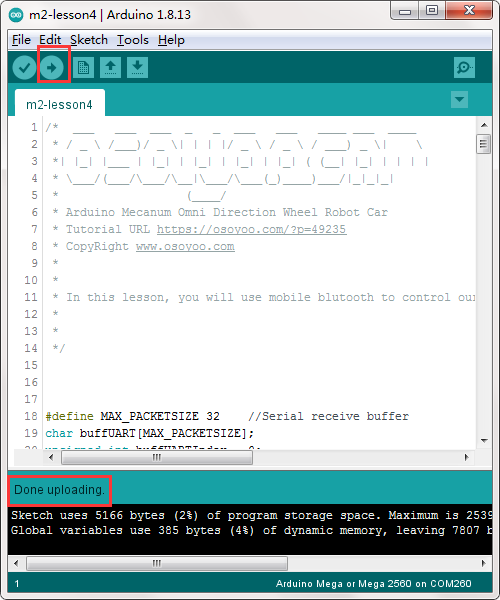
Passaggio 3: collegare la scheda Mega2560 al PC con cavo USB, aprire Arduino IDE → fare clic su file → fare clic su Apri → scegliere il codice “m2-lesson4.ino” nella cartella m2-lesson4, caricare il codice in Arduino.
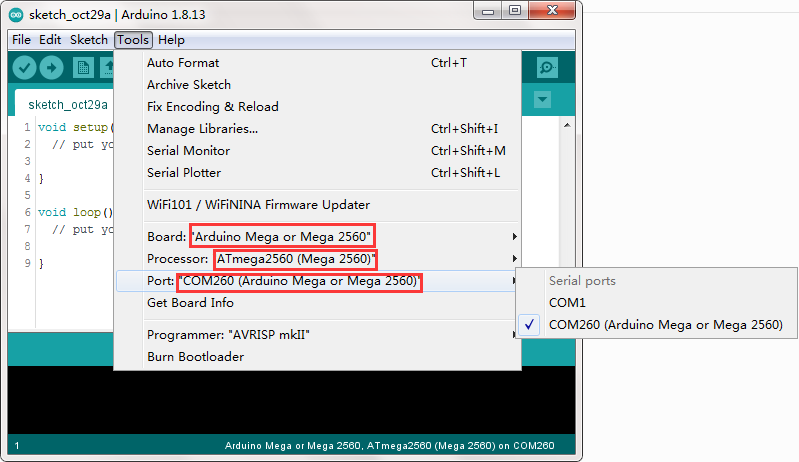
Passaggio 4: scegli la scheda/porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
APP mobile:
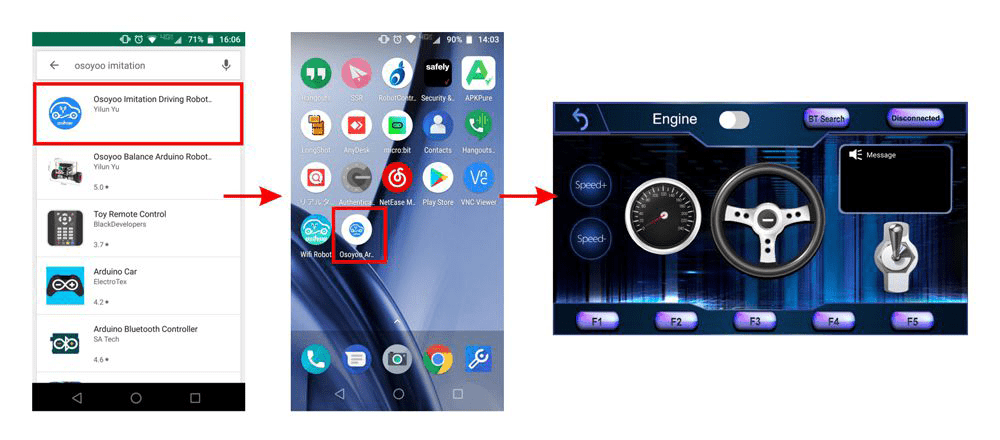
Vai al tuo negozio Google Play o Apple APP e cerca il nome dell’APP “OSOYOO imitation driving”, scarica l’APP come segue e installala sul tuo smartphone.
Collegare HC-02 Bluetooth nel telefono Android. C’è un pulsante Ricerca BT nell’APP Android: quando fai clic su questo pulsante, vedrai un elenco di dispositivi Bluetooth che è stato accoppiato con la tua APP. Selezionare il dispositivo HC-02 per connettere l’auto. Una volta connesso l’HC-02, lo stato Bluetooth cambierà da Disconnesso a Connesso. Puoi controllare la tua auto solo quando il Bluetooth è connesso.
Collegare l’HC-02 Bluetooth all’iPhone/iPad, è sufficiente fare clic sul pulsante Connetti , un dispositivo HC-02 verrà visualizzato in un elenco a comparsa. Fai clic sul dispositivo HC-02 per connettere il modulo Bluetooth al tuo iPhone. Quindi il pulsante Connetti cambierà nome in Disconnetti.
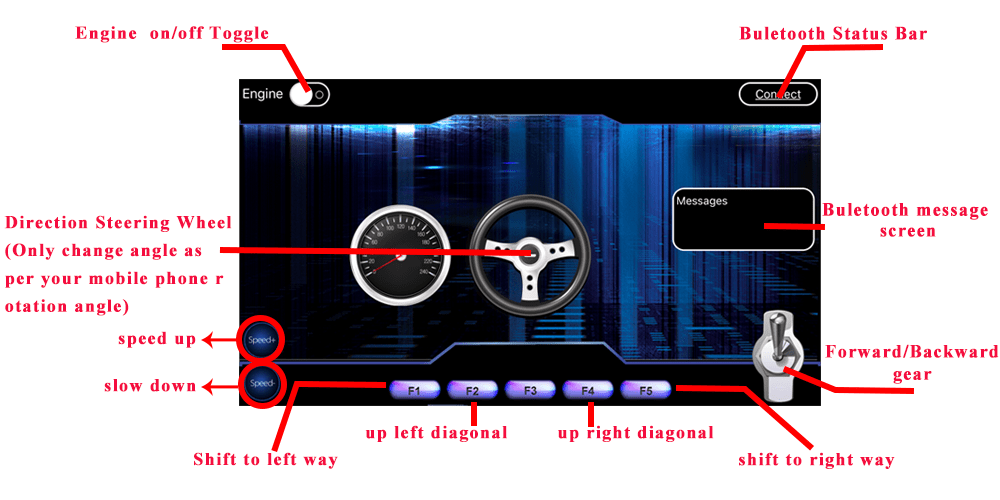
Interfaccia di visualizzazione
Accendi il robot e apri l’APP.
1)Collega l’APP al modulo Bluetooth HC-02
Connettiti con un dispositivo Android:
Se utilizzi un dispositivo Android e non hai accoppiato il modulo Bluetooth con il tuo cellulare, accoppia il modulo Bluetooth prima di aprire l’APP. Nelle impostazioni del tuo telefono cellulare → Bluetooth, trova un dispositivo Bluetooth chiamato HC02, accoppialo con la password 1234. Dopo che il dispositivo Bluetooth HC02 è stato accoppiato, apri l’APP. Fai clic sul pulsante Ricerca BT per connettere l’APP al dispositivo HC02.
Connettiti con il dispositivo iOS: Se utilizzi un dispositivo iOS, apri semplicemente l’APP, fai clic sul pulsante Connetti, vedrai un elenco Bluetooth, seleziona il dispositivo HC02.
2) Fare clic sull’interruttore del motore per avviare/arrestare l’auto
3) Fare clic sul pulsante Velocità +/- per accelerare o ridurre la velocità
4) Ruota il cellulare per cambiare direzione (il volante ruoterà mentre giri il telefono)
5) fare clic sul pulsante Gear per cambiare la marcia in avanti o indietro.
6) premere F1 per spostarsi a sinistra, F5 per spostarsi a destra, F3 in diagonale in alto a sinistra, F4 in diagonale in alto a destra.
Regolazione della velocità del motore per prestazioni migliori
Per ottenere migliori risultati in termini di prestazioni di corsa, il valore della potenza del motore (velocità) deve essere regolato correttamente in base al livello della batteria. Se il valore della potenza del motore (velocità) è troppo alto, la tua auto potrebbe correre troppo velocemente e perdere facilmente il controllo. Se la potenza del motore (velocità) è troppo bassa, l’auto potrebbe anche non muoversi.
Per regolare il valore della potenza del motore, è necessario modificare la riga delle 3 costanti 24,25,26,27,28 nello sketch file m2-lesson4:
MIN_SPEED è la potenza minima richiesta per avviare l’auto. Se quando l’interruttore del motore dell’APP è impostato su ROSSO, ma la tua auto non si muove, devi aumentare questo valore, se l’auto va troppo veloce al momento dell’avvio del motore, devi ridurre questo valore.
Il valore TURN_SPEED, SLOW_TURN_SPEED determina la velocità di svolta della tua auto. Se la tua auto gira troppo velocemente, devi ridurre questi due valori, se gira troppo lentamente o non gira, aumenta questi due valori. Rendi sempre SLOW_TURN_SPEED inferiore di circa 20 a 40 rispetto al valore TURN_SPEED.
Il valore BACK_SPEED determina la velocità di retromarcia.
Dopo che le batterie si stanno scaricando, potrebbe essere necessario aumentare il valore di queste 3 costanti. Puoi aggiungere o ridurre gradualmente 10 ogni volta su questi valori e confrontare quali valori hanno le migliori prestazioni di tracciamento.















The app is not available for my android version 13.
Thanks