È possibile scaricare il manuale d’uso da:

In questa lezione useremo il cellulare per controllare la nostra auto robot e fare un’imitazione di guida. Poiché si tratta di una simulazione di guida, utilizzeremo un volante e un cambio virtuali nella nostra APP per imitare le loro controparti nell’auto reale.
È necessario completare la lezione 2 Movimento di base prima di continuare con questa lezione.
Se non riuscite a completare l’inquadratura dell’auto, ripassate la lezione 1.


Se non avete completato il collegamento dei fili di base, rivedete la lezione 2.
Collegamento:
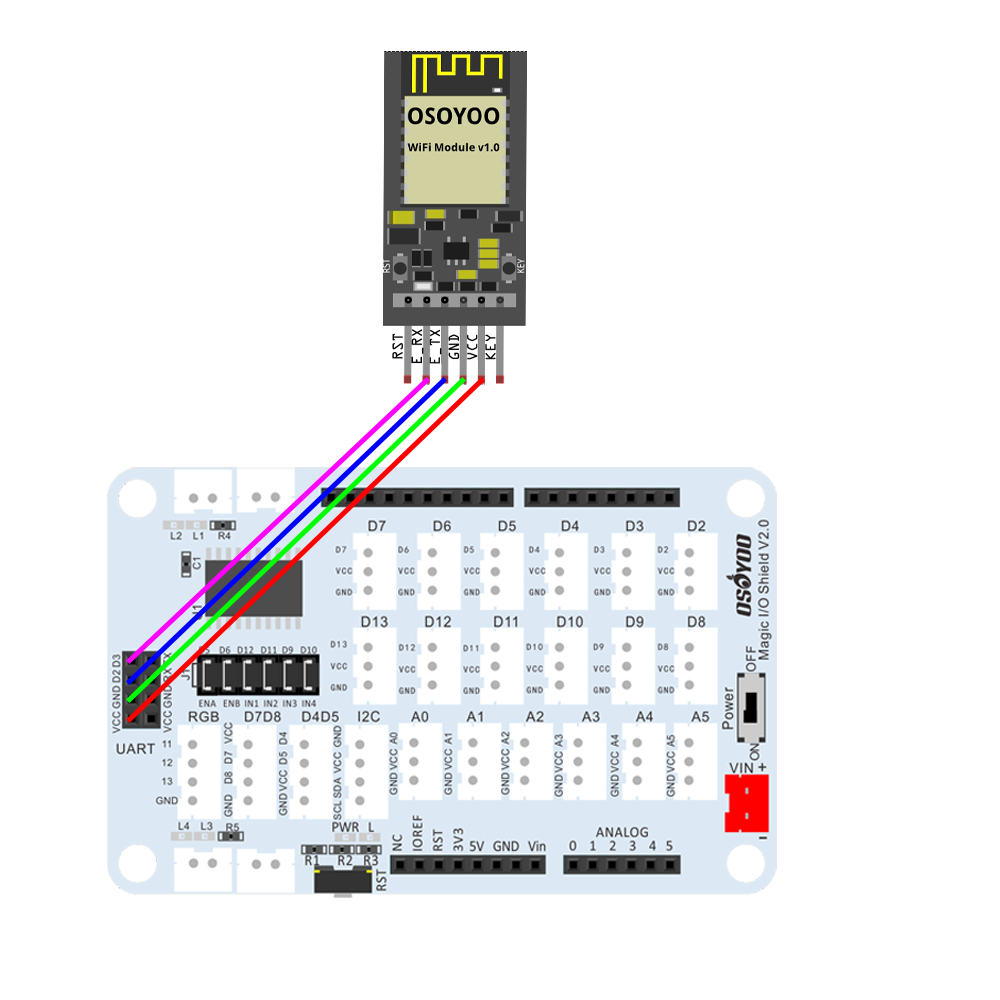
Rimuovere i cappucci dei ponticelli su ENB, IN3, IN4
Inserire il modulo WiFi (VCC, GND, D2, D3) nello schermo del motore OSOYOO come indicato nel grafico seguente (ricordare: NON rimuovere i fili esistenti installati nella lezione 2):
| PARTE |
Schermo motore |
| IN1 ponticello |
D12 |
| IN2 ponticello |
D11 |
| ENA ponticello |
D5 |
| Servo sterzante |
D9 |
| Cavo motore posteriore |
K1 or K2 |
| Sensore di tracciamento sinistro |
D6 |
| Sensore di tracciamento destro |
D7 |
| E_TX ponticello |
D4 |
| E_RX ponticello |
D11 |

Passo 1)
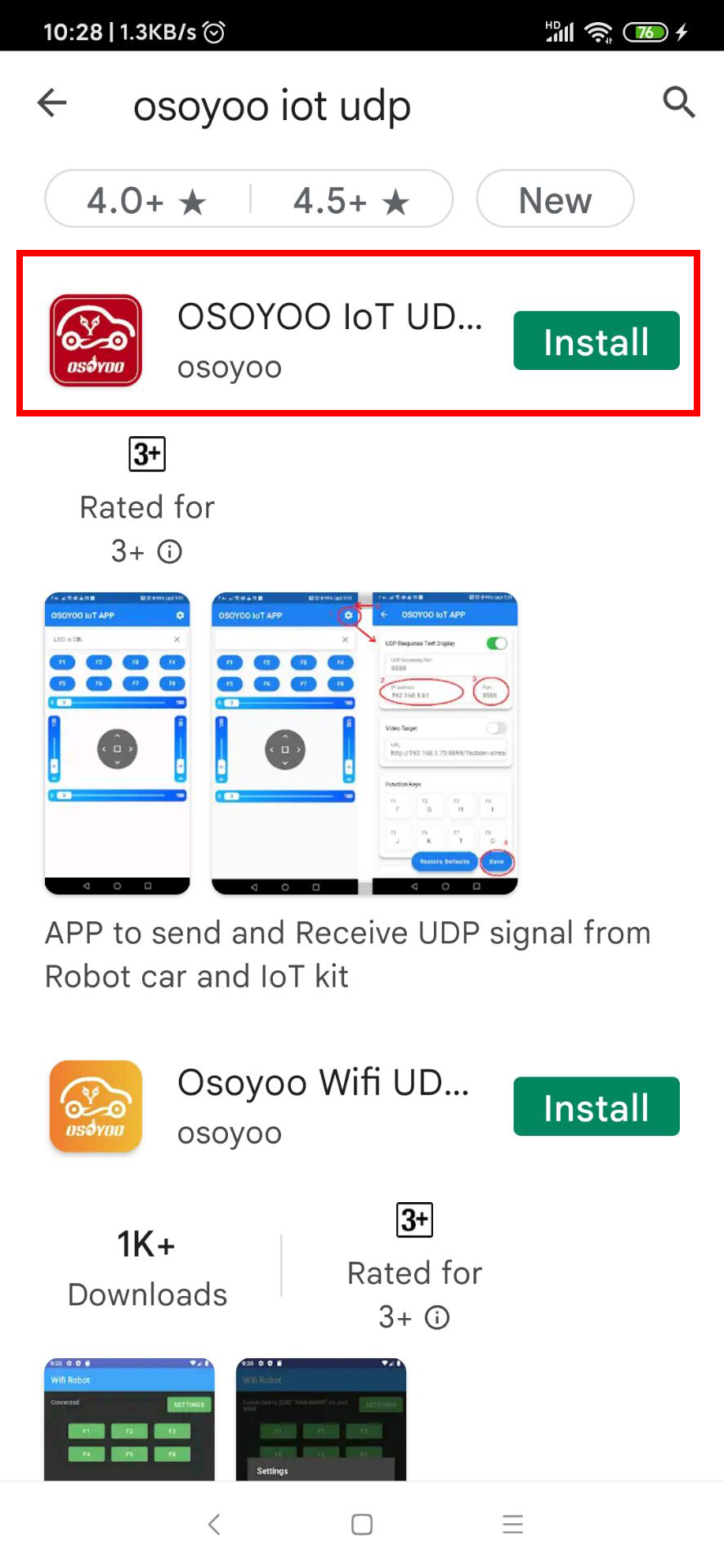
Scaricare l’APP di controllo di OSOYOO WIFI UDP Robot Car
In Google Play o Apple Store, cercare le parole chiave “OSOYOO iot UDP Robot Car”, si troverà un’icona rossa APP come segue:
Passo 2)
Scaricare la libreria PWMServo da https://osoyoo.com/driver/sg90car/PWMServo.zip se non è stata installata nella lezione 2.
Scaricare anche il file zip della libreria WifiESP-Master da https://osoyoo.com/driver/WiFiEsp-master.zip.
Ora aprite l’IDE Arduino, fate clic su Sketch ->Include Library ->Add .ZIP library, quindi caricate i due file zip di cui sopra nella scheda OSOYOO Basic per Arduino.

Passo 3) Installazione del codice Sketch:
1) Scaricare il codice dello sketch da https://osoyoo.com/driver/2022008400/lesson5.zip .Decomprimere il file e vedere la cartella lesson5.ino. Aprire Arduino IDE -> fare clic su file -> fare clic su Apri -> scegliere il file di codice lesson5.ino nella cartella precedente, caricare il codice in OSOYOO Basic Board per Arduino.

2) È necessario modificare l’SSID e la passsword del wifi nelle righe 52 e 53.
char ssid[] = “***”; // replace *** with your router wifi SSID
char pass[] = “***”; // replace *** your wifi password
3) Modificare il valore predefinito 90 nella riga seguente come valore FRONT nell’opzione 2 al passaggio 5 della lezione 2. Se si allinea la direzione della ruota manualmente come opzione 1 nel passaggio 5 della lezione 2, saltare questo passaggio.
#define FRONT 90 //degree when steering facing straight forward
4) Caricare lo sketch su OSOYOO Basic Board for Arduino. Infine, fare clic sulla finestra del monitor seriale nell’angolo in alto a destra dell’IDE Arduino:

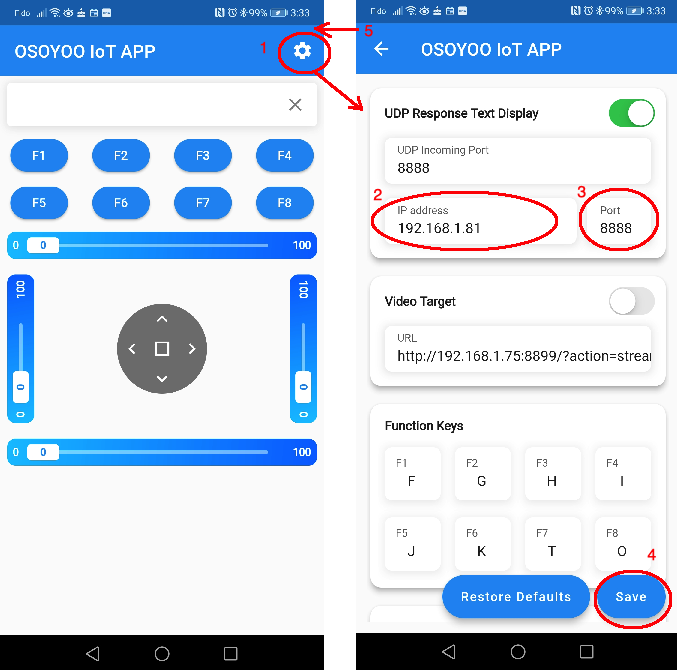
5) In questa modalità, si vedrà un indirizzo IP che è il nostro indirizzo IP LAN assegnato dal mio router. Annotare questo indirizzo IP e fare clic su Impostazione per impostare l’indirizzo IP del robot e impostare questo indirizzo IP nella sezione Impostazione APP e Porta su 8888 nelle impostazioni.
Ora l’auto robot è connessa alla LAN, è possibile utilizzare il telefono cellulare sotto la stessa LAN per controllare l’auto robot. Se l’APP è in WAN, è necessario accedere al pannello di controllo del router, inoltrare la porta 8888 all’indirizzo IP della LAN dell’auto robot, quindi è possibile utilizzare l’IP del router per controllare l’auto. Questa caratteristica rende la nostra auto robot un vero e proprio dispositivo INTERNET OF THING.

Accendere la macchina. Ora fare clic su Impostazione per impostare l’indirizzo IP del robot.
A) è necessario collegare il telefono cellulare alla stessa rete LAN dell’auto robot e impostare l’indirizzo IP come l’IP del robot mostrato in Arduino Serial Monitor.
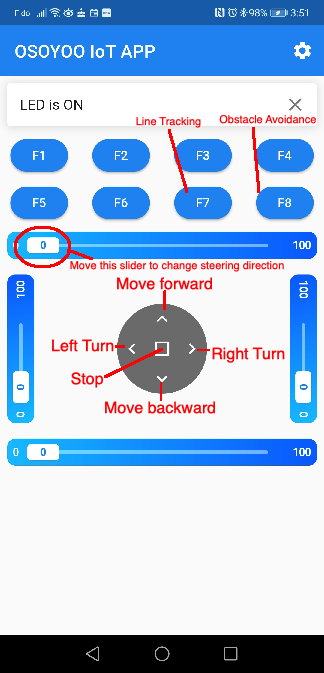
È possibile fare clic sul pulsante ◄ per girare a sinistra (ruotare il volante in senso antiorario), fare clic sul pulsante ► per girare a destra (ruotare il volante in senso orario).
Il tasto ▲ fa avanzare l’auto e il tasto ▼ la fa retrocedere.
Se si preme il tasto F7, l’auto seguirà la linea.














































































Could I contoll my car with my chrome browser?
thanks