注:すべてのosoyoo製品は、arduinoコンテンツと完全に互換性のあるサードパーティボードです。
コンテンツ
- はじめに
- 準備
- IRとは?
- 使用例
はじめに
IR(赤外線)通信は、一般的で、安価で使いやすい無線通信技術です。赤外光は可視光線とよく似ていますが、波長が少し長いのが特徴です。つまり、赤外線は人間の目には検出されず、ワイヤレス通信に最適です。このレッスンでは、赤外線送信モジュールと赤外線受信モジュールとOsoyooベーシックボードの使い方を紹介します。
準備
ハードウエア
- Osoyooベーシックボード (Arduino UNO rev.3と完全互換) x 1
- 赤外線送信モジュール x 1
- 赤外線受信モジュール x 1
- ブレッドボード x 1
- ジャンパー
- USBケーブル x 1
- PC x 1
ソフトウェア
- IDE(バージョン1.6.4以上)
- IRremote.h
IRとは?
赤外光は、実際には特定の色を持つ通常の光です。波長が約950nmと可視光線より低いため、私たち人間にはこの色が見えません。IRがリモコン用に選ばれる理由のひとつはここにあります。もう一つの理由は、IR LEDは非常に簡単に作ることができるため、非常に安価に入手することができ、ホビイストが自分のプロジェクトにIRコントロールを使うのに理想的だからである。赤外線の光源は他にもたくさんある。太陽は最も明るい光源ですが、その他にも電球、ろうそく、セントラルヒーティングシステム、そして私たちの身体でさえも赤外線を放射しています。赤外線通信の一般的な変調方式は38kHz変調と呼ばれるものです。38kHz信号のような規則性を持つ自然光源はほとんどないため、この周波数でデータを送信するIRトランスミッターは、周囲のIRの中で目立つことになる。38kHz変調のIRデータが最も一般的ですが、他の周波数を使うこともできます。リモコンのキーを押すと、送信側のIR LEDがほんの一瞬、非常に速く点滅し、エンコードされたデータを家電製品に送信します。
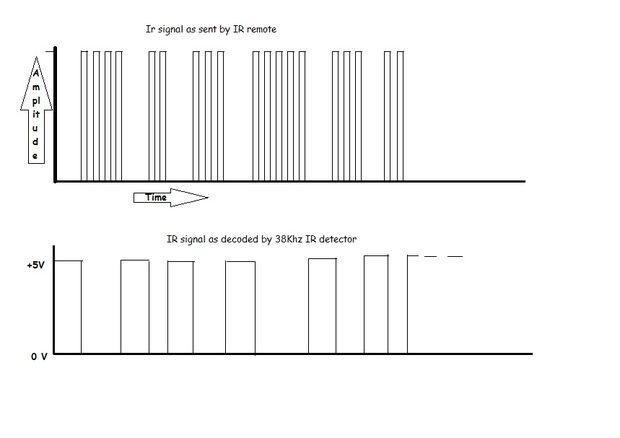
テレビのリモコンのIR LEDにオシロスコープ をつなぐと、上のような信号が見えるはずだ。この変調された信号は、まさに受信システムが見ているものだ。しかし、受信デバイスのポイントは、信号を復調し、マイクロコントローラーが読み取れるバイナリ波形を出力することです。上の波形でVS1838BのOUTピンを読むと、2番目のようになります。
変調
熱を放射するものはすべて赤外線も放射します。そのため、赤外線メッセージがエラーなく受信機に伝わるように、いくつかの予防措置を講じる必要があります。信号を搬送波周波数で変調することで、信号をノイズより目立たせることができます。変調では、IR光源を特定の周波数で点滅させます。IRレシーバーはその周波数に同調するため、他のすべてを無視することができます。下の写真では、変調された信号が左側の送信機のIR LEDを駆動しているのがわかります。検出された信号は反対側のレシーバーから出ている。
(Thanks to SBProjects.com for the gif and excellent IR resource!)
VS1838B IRレシーバーの技術的詳細
- 型番:VS1838B;
- 動作電圧:2.7V~5.5V
- 受信距離:18M;
- 受信角度:± 45度;
- 低レベル電圧:0.4V
- 高レベルの電圧: 4.5V;
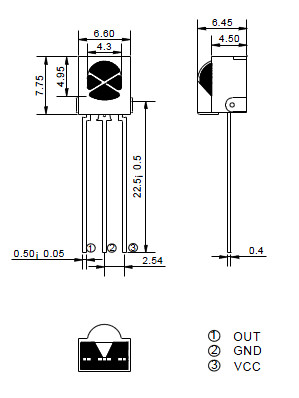
- ボディサイズ: 7 × 7 × 5ミリメートル/ 0.27″×0.27″×0.2″(L * W * T);
- ピンの長さ:22.5ミリメートル/ 0.88″の
- ピッチ:2ミリメートル/ 0.08″;
VS1838B赤外線レシーバーピンアウト:
赤外線送信モジュール
この小さなユニットは、5Vロジックレベルで動作するマイクロコントローラーに接続することができます。IR送信モジュールを使用すると、このモジュールから信号、コマンド、クエリーを送信できます。一般的には、5フィート以上の距離からテレビのリモコンに使用されます。ロボットの使用には、もう一方の端にIRレシーバーが必要です。
. 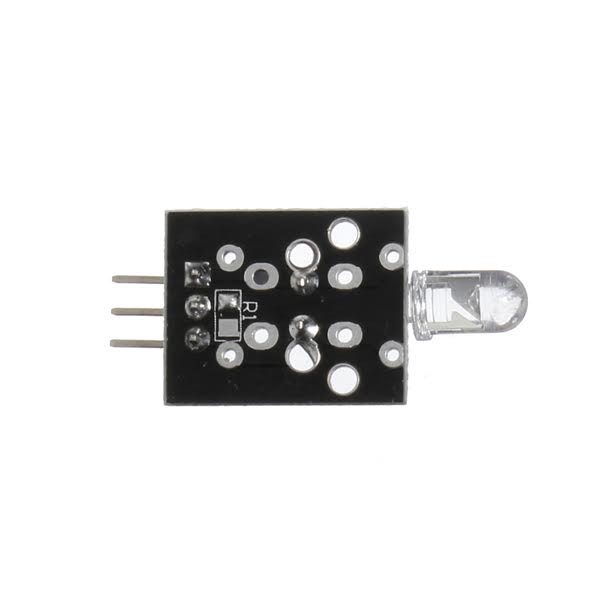
ピンが手前を向くように基板を持ち、左側の-はアース、中央のピンは5V電源、右側のSはデジタルピン11です。IRトランスミッターモジュール Keyes KY-005、38kHzの赤外線を発する。
仕様
- 寸法 35 x 15 x 5 mm (長さ x 幅 x 高さ)
- 動作電圧: 5VDC
- 消費電流: 30-60mA
- パルス順方向電流: 0.3 – 1A
- 電力損失: 90mW
- 動作温度: -25 ~ 80
ir-remoteライブラリ:
注意:動作させるには、以下のライブラリをインストールする必要があります!
ここをクリック – IR REMOTE CONTROL: ARgithub.com/shirriff/IRremoteDUINO LIBRARY 注意! IRRobotRemoteライブラリのあるIDEの後期バージョンを使用している場合、競合する可能性があるため、そのライブラリを削除する必要があります。Arduino(root)/libraries/RobotIRremoteのパスを必ず削除してください。Arduino(root)のフォルダはArduinoのインストールディレクトリです。ライブラリRobot IRremoteはIRremoteと定義が似ていてエラーになります。
例
IRリモートからのコード読み取り
この例では、VS1838B IRレシーバーと制御されたボードを使用して、任意のIRリモートからIRリモートコードを読み取る方法を示します。個々のボタン押下からコードを受信できるようになると、リモコンと基本ボードは汎用的な近距離通信インターフェイスになります!IR ライブラリ のインストール方法は、 こちらを参照してください。
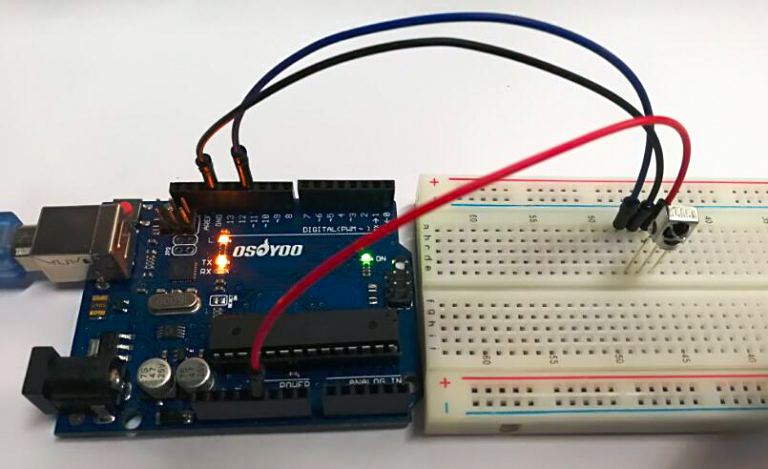
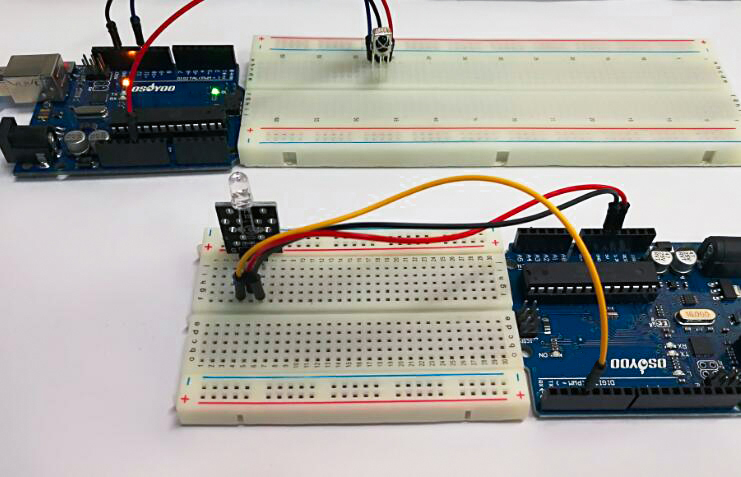
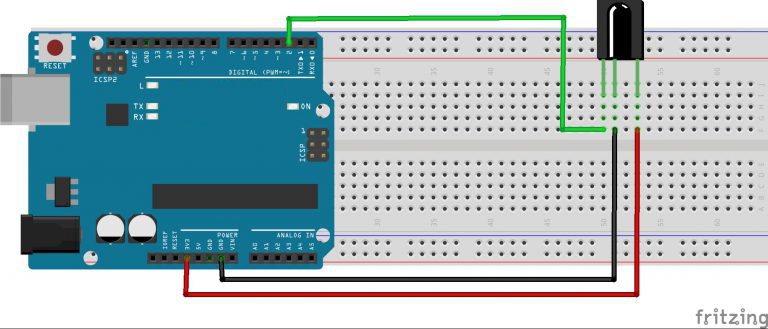
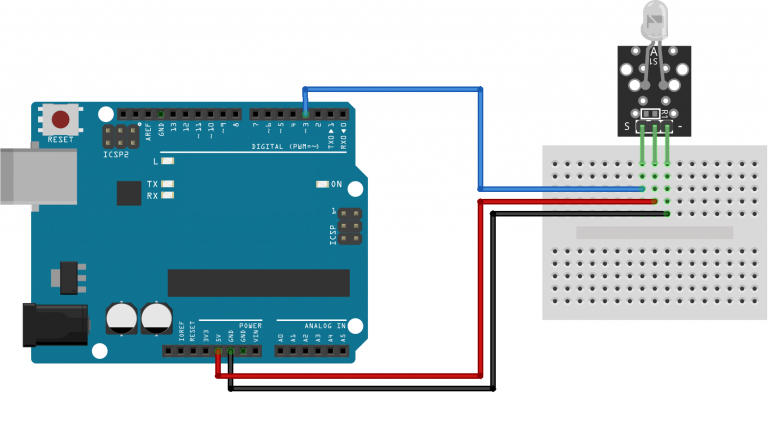
接続方法
以下のように回路を組む:
コードプログラム
上記の操作が完了したら、USBケーブルを使用してボードをコンピュータに接続します。IDEを開き、プロジェクトに対応するボード・タイプとポート・タイプを選択してください。次に、以下のスケッチ をボードにロードしてください。
#include <IRremote.h> // use the IRRemote.h
const int irReceiverPin = 2; //the SIG of receiver module attach to pin2
IRrecv irrecv(irReceiverPin); //Creates a variable of type IRrecv
decode_results results; // define resultsas
void setup()
{
Serial.begin(9600); //initialize serial,baudrate is 9600
irrecv.enableIRIn(); // enable ir receiver module
}
void loop()
{
if (irrecv.decode(&results)) //if the ir receiver module receiver data
{
Serial.print("irCode: "); //print "irCode: "
Serial.print(results.value, HEX); //print the value in hexdecimal
Serial.print(", bits: "); //print" , bits: "
Serial.println(results.bits); //print the bits
irrecv.resume(); // Receive the next value
}
delay(600); //delay 600ms
}
特定のボタンが押されると、入力された値を使用して、コード内で別のことを行うことができます。各ボタンを押した結果は、value()メソッドを呼び出すことで確認できます:
results.value
シリアル・モニター・ウィンドウに値を表示することができます:
Serial.println(results.value, HEX); //ボタンを押したときの16進数値を表示します。
実行結果
スケッチは、使用しているリモートのタイプを自動的にデコードし、リモートのどのボタンが押されたかを識別します。IDEのシリアルモニターを9600bpsで開き、リモコンのさまざまなボタンを押してみてください。
赤外線信号の送信
この例では、Osoyooベーシックボードとky005モジュールの使い方を紹介します。
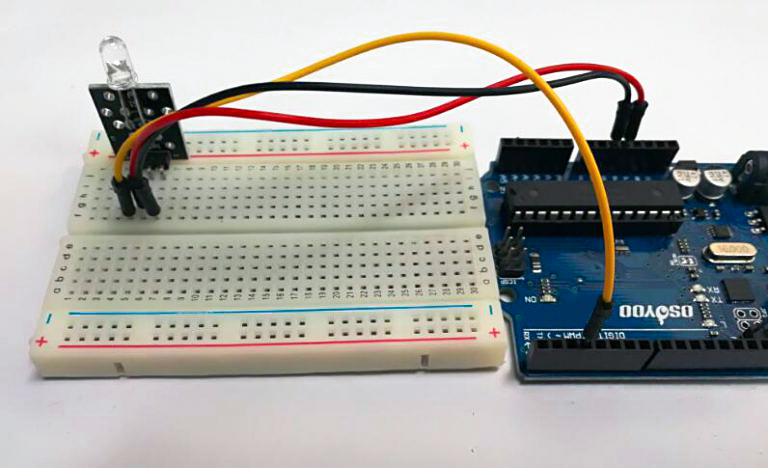
電源ライン(中)とアース(-)をそれぞれ+5とGNDに接続する。信号(S)をボードの3番ピンまたはMegaの9番ピンに接続します。赤外線トランスミッタのピン番号はIRremoteライブラリによって決定されます。
| KY-005 |
OSOYOO 基本ボード |
| S |
Pin 3 |
| middle |
+5V |
| – |
GND |
コードプログラム
以上の操作が完了したら、USBケーブルでボードとコンピュータを接続します。IDEを開き、プロジェクトに対応するボード・タイプとポート・タイプを選択してください。次に、以下のスケッチをボードにロードしてください。
#include <IRremote.h> // Referring to the IRRemote function library, the header file
//has defined PIN 3 as the signal output, so it can only connect
//to PIN 3. If change, please change it in the header file
IRsend irsend;
void setup()
{
//
}
void loop()
{
irsend.sendNEC(0xFF02FD, 32); //The code 'FF02FD' is the received infrared code
//if you need to use other functions, please
//use the receiving tube read the correct encoding value.
delay(2000);
}
実行結果
アップロードが終了して数秒後、最初のサンプル・デバイスのシリアル・モニターを開くと、画面に対応するIRコードが表示されます。









