認定オンライン販売業者
>
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本 |
 |
 |
 |
 |
 |
 |
 |

目的
このレッスンでは、最も重要なフレームワークをスマートカーにインストールし、Pythonサンプルコードに従って車を作成して簡単な動きをさせ。またスマートカーの組立、配線、作動確認を行いArduino、電圧計、モーター駆動モジュール(Model-PI)、モーター、バッテリー、シャーシ、およびこれらのおよびこれらの部品間のワイヤ配線も正しく施行されているか確認行うものです。
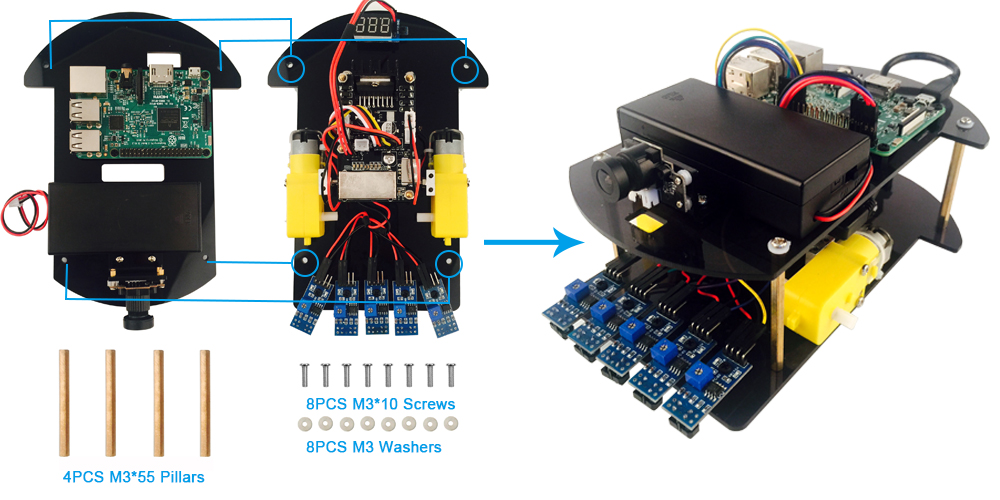
ハードウェアのインストール
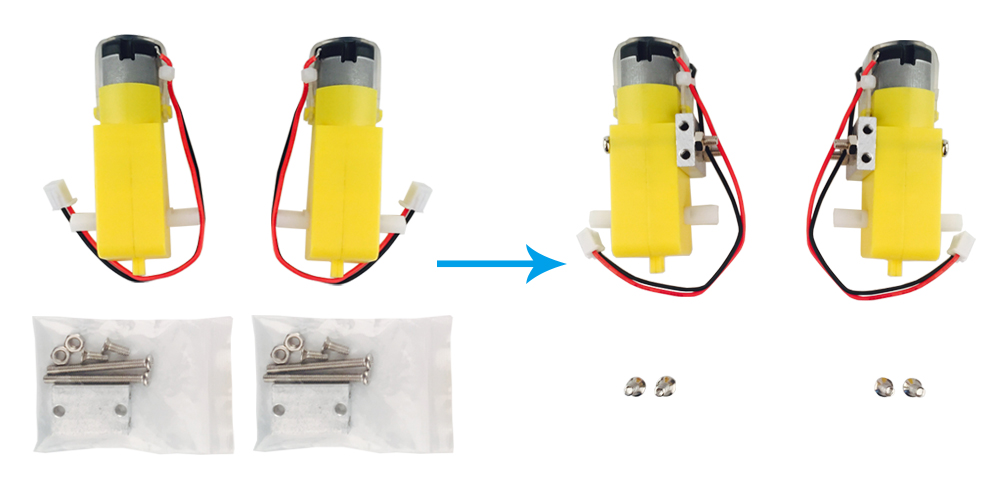
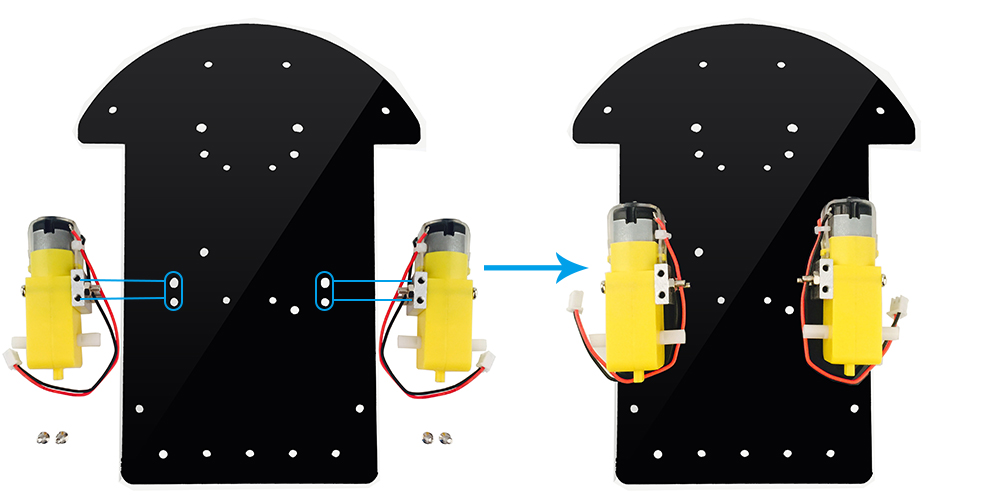
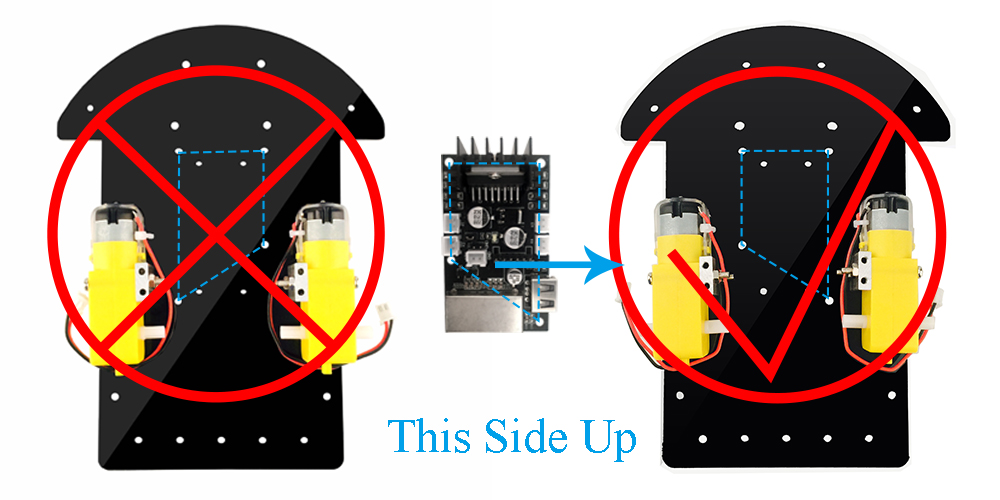
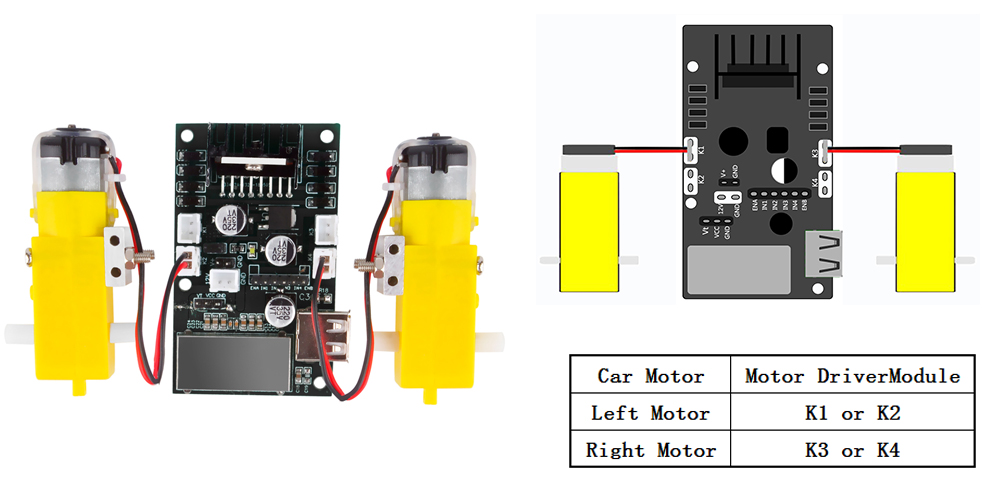
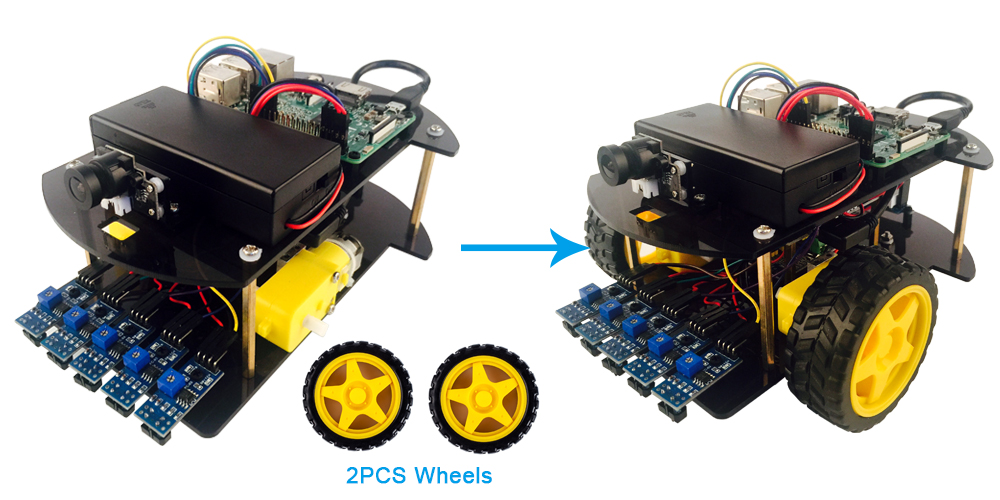
ステップ1:次のように駆動輪を取り付けます
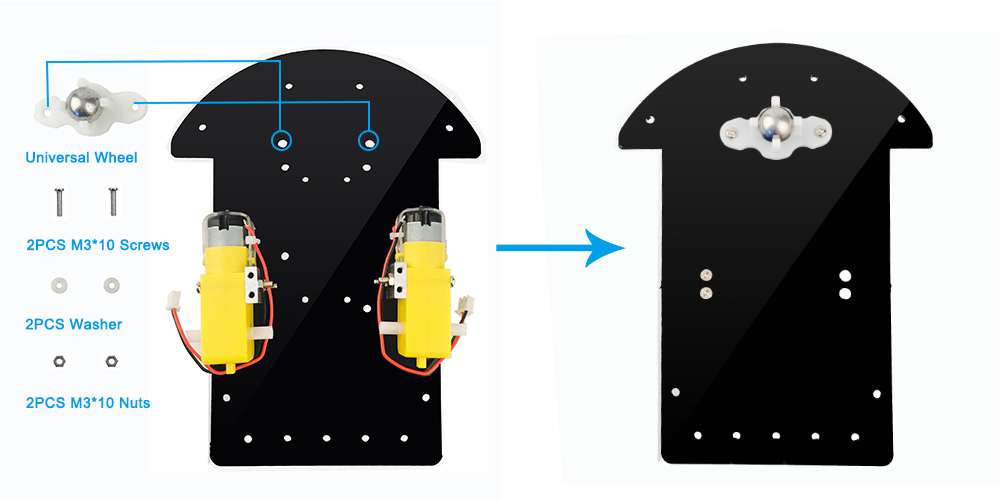
ステップ2:ユニバーサルホイールを取り付けます
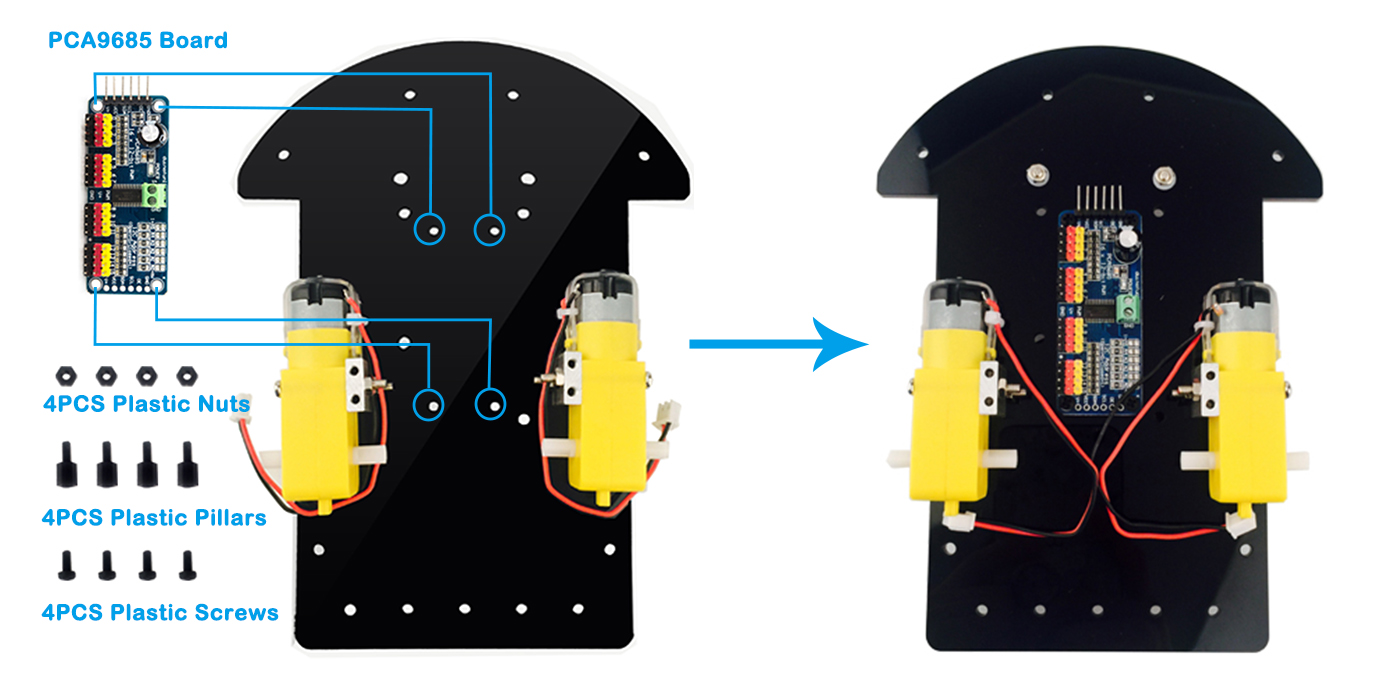
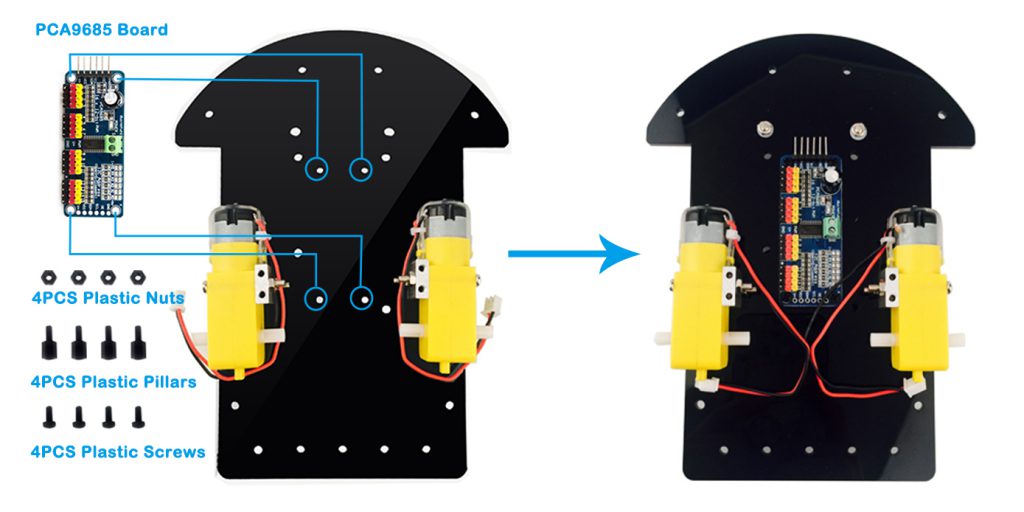
ステップ3:PCA9685互換モジュールをインストールします
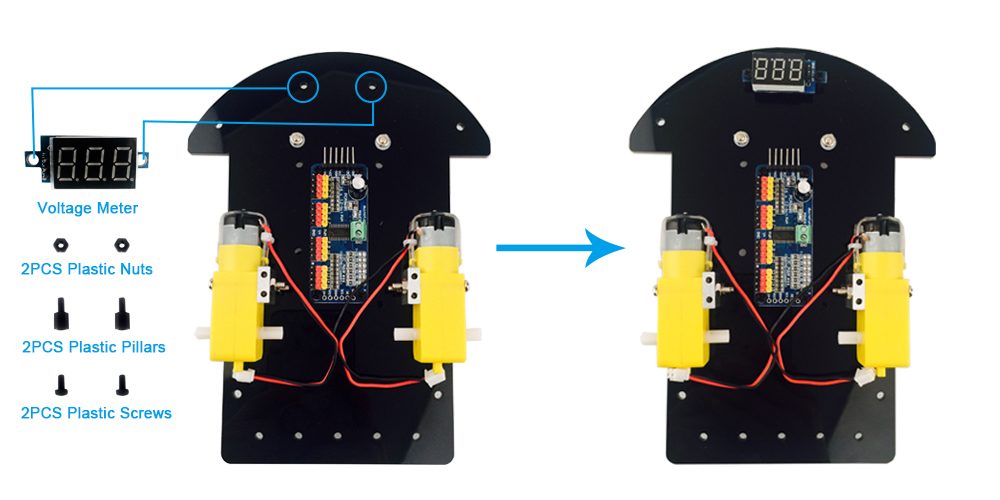
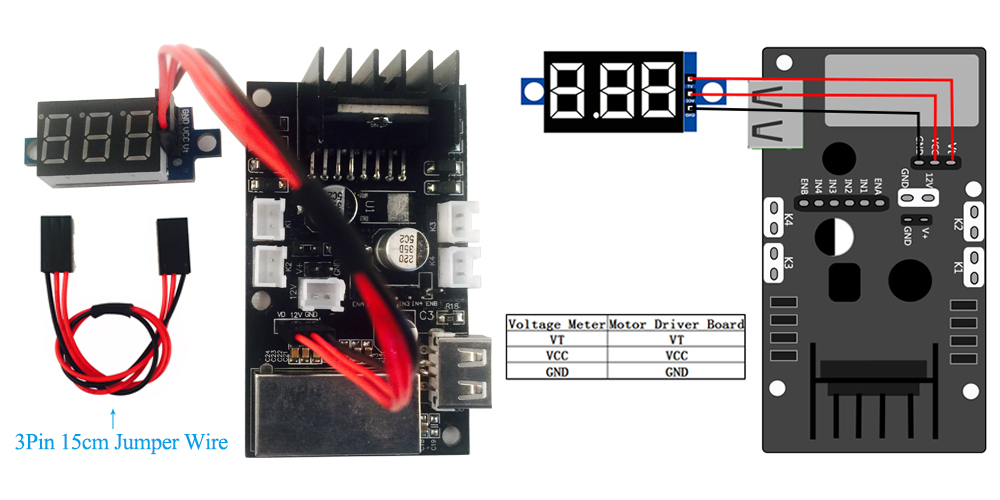
STEP4.次のように電圧計を取り付けます
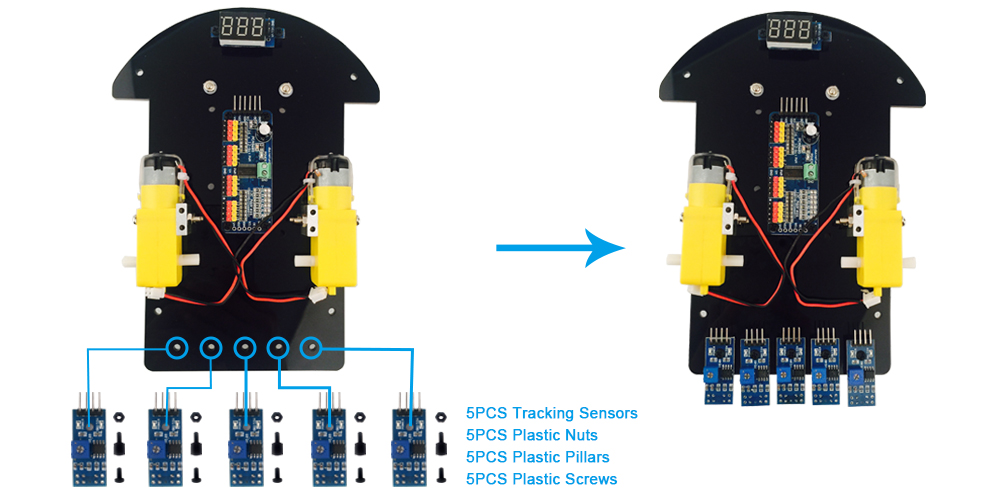
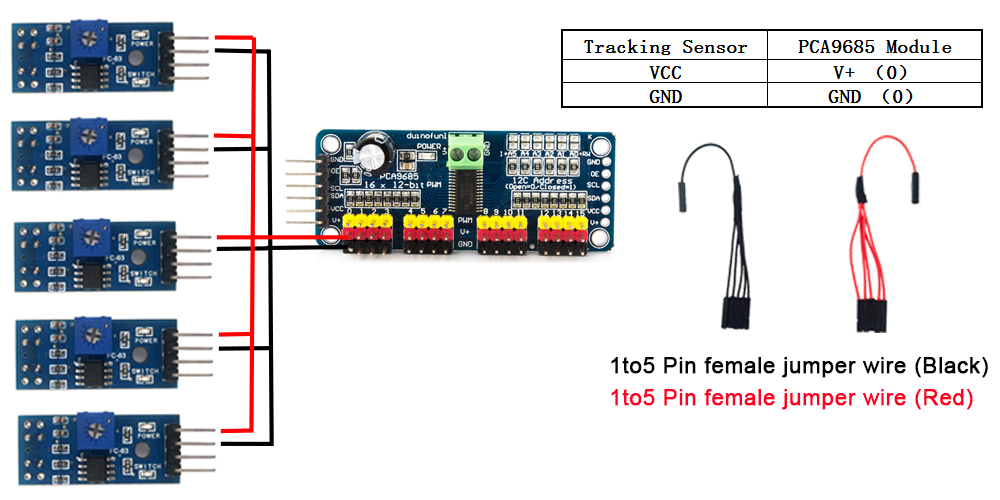
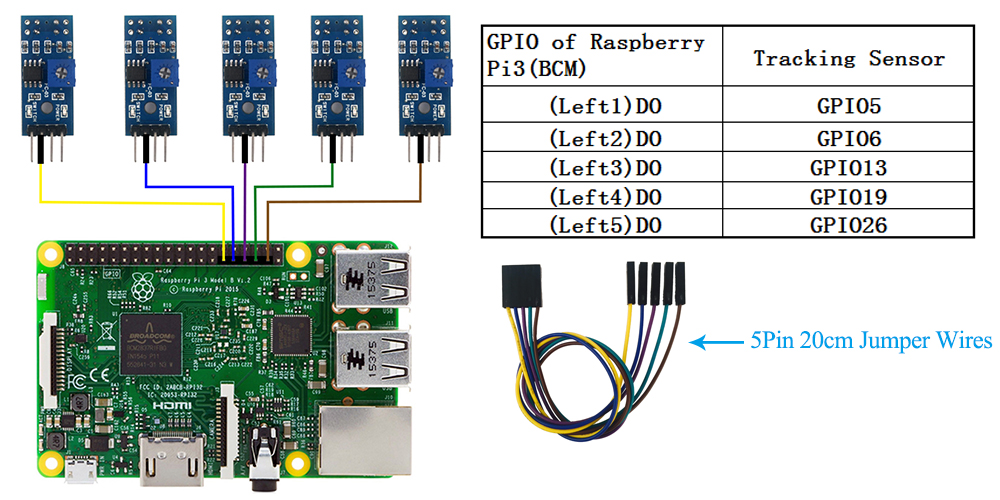
STEP5. 5個の追跡センサーを次のように取り付けます
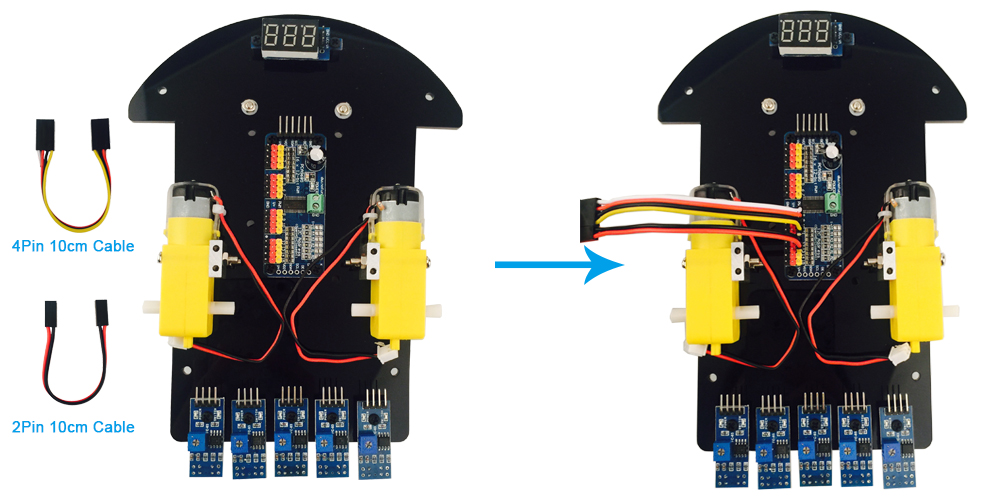
ステップ6:4ピンメス-メスケーブル(白、赤、黒、黄)と2ピンメス-メスケーブル(黒、赤)を次のようにPCA9685互換ボードに差し込みます
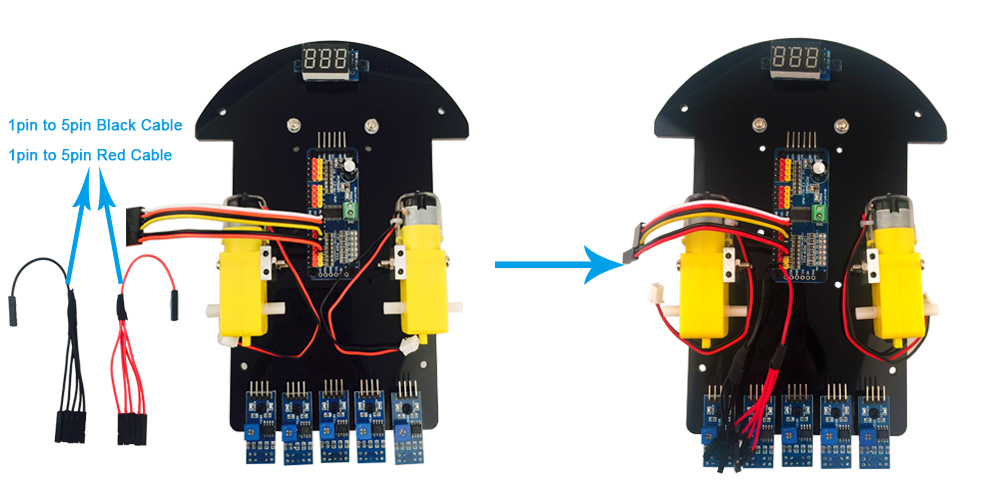
ステップ7: 1ピンから5ピンをメス-メスのケーブル(黒と赤)をPCA9685互換ボードに次のように差し込みます
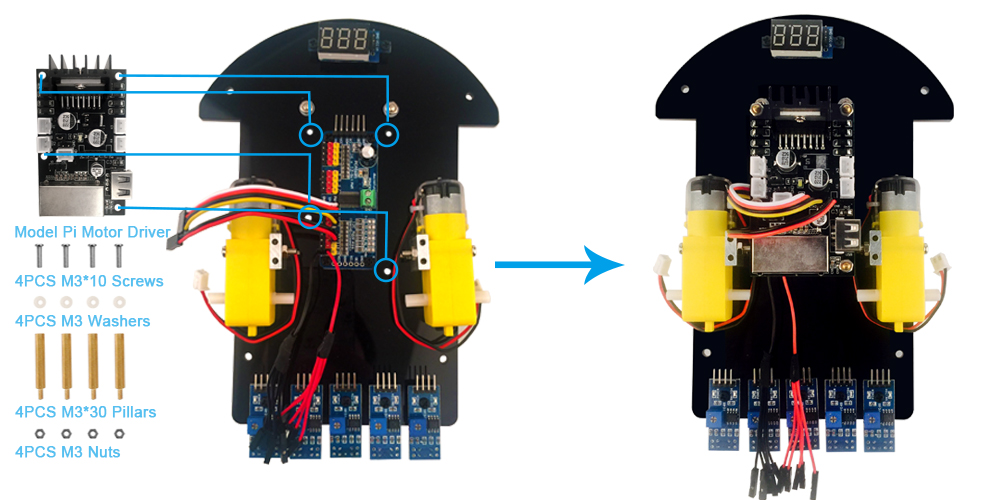
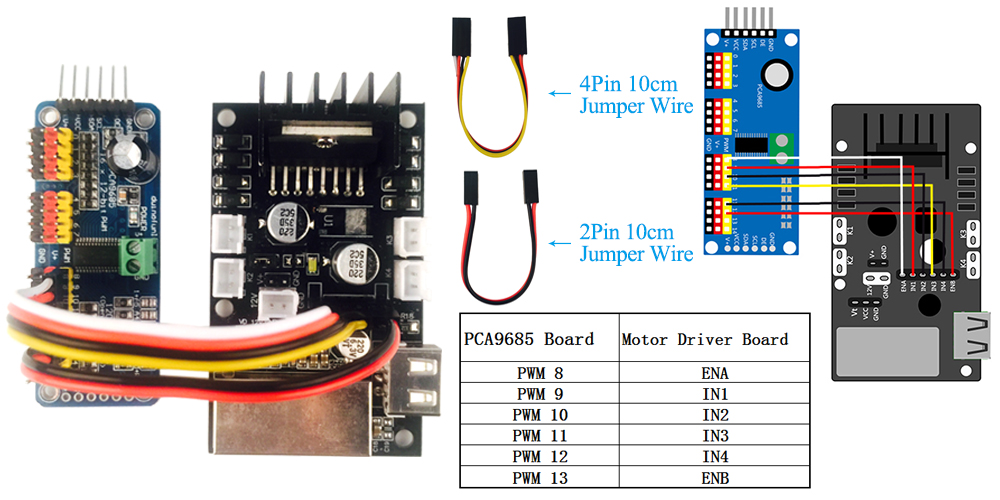
ステップ8:次のようにPIモータードライバーボードを取り付けます。次に、PCA9685互換モジュールを4ピンおよび2ピンケーブルで接続、さらに電圧計を3ピンケーブルでモータードライバーボードに接続します
ステップ9:次のようにカメラモジュールを上部の車のシャーシに取り付けます

ステップ10:次のように、バッテリーボックスをトップカーシャーシに取り付けます。

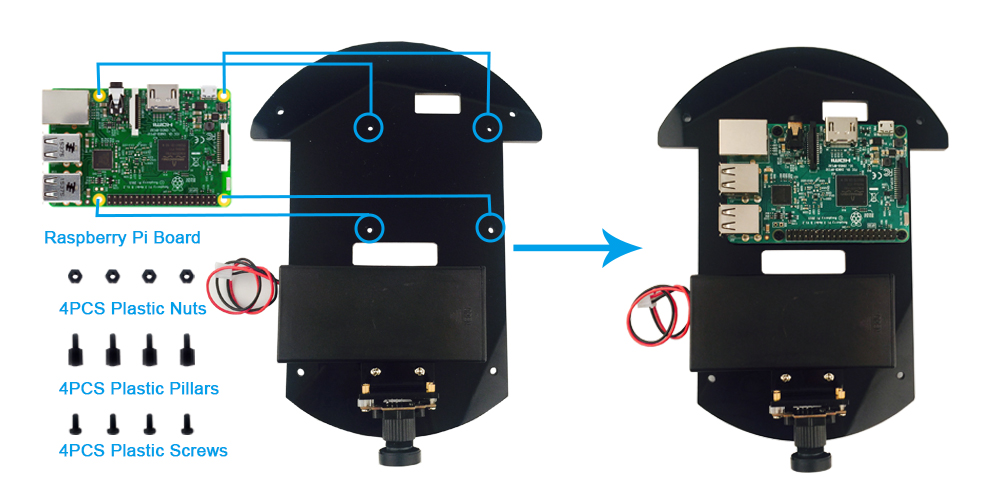
ステップ11:次のように、上部の車のシャーシにraspberry piを取付ける
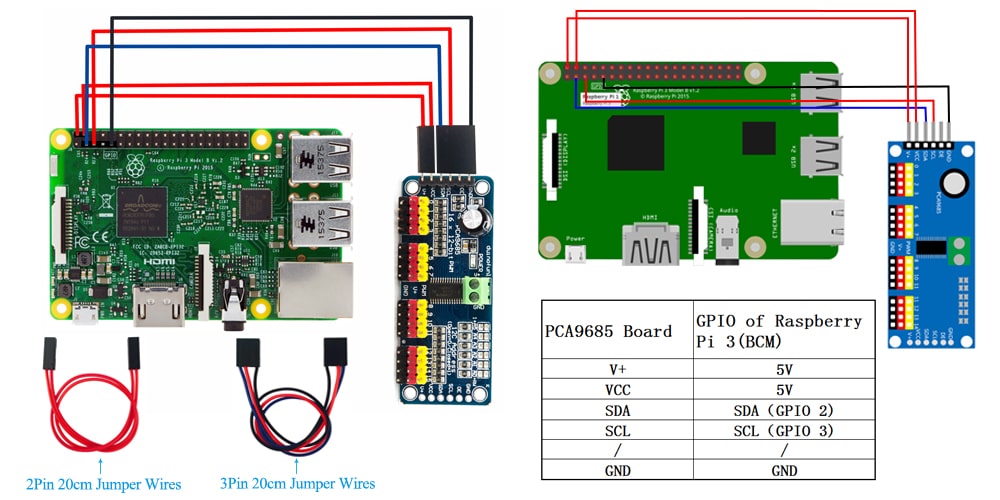
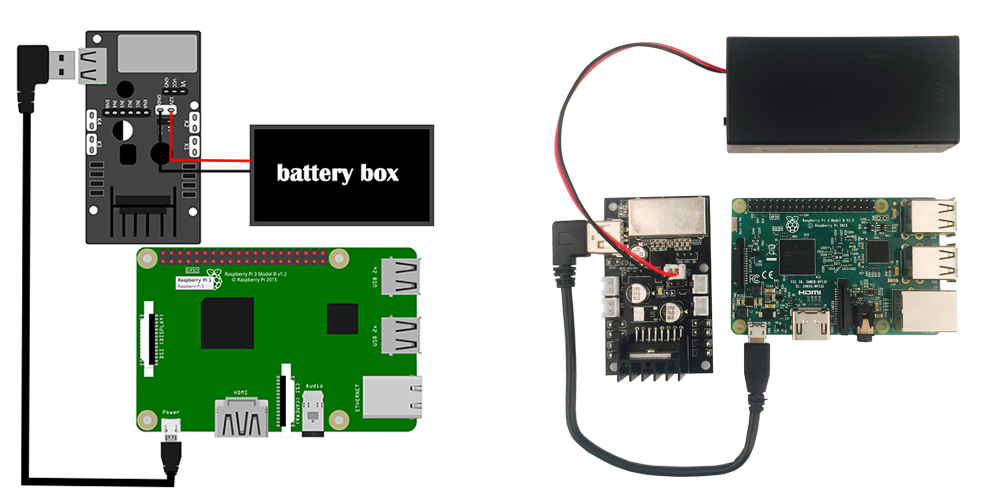
ステップ12:トップシャーシを次のように取り付ける前に、バッテリーボックスをモデルpiモータードライバーに差し込み、Raspberry PiボードをPCA9685互換モジュールとモデルpiモータードライバーボードに接続する必要があります。最後に、5個のトラッキングセンサーをraspberry piに接続します次のように
ステップ13:次のように上部シャーシを取り付けます
ステップ14:左右の車輪を取り付けます
ソフトウェアのインストール
ビデオチュートリアル:OSOYOO Imageを焼く
ビデオチュートリアル:SD Card
ソフトウェアの準備:
Imagerユーティリティ: Win32DiskImager utility
OS: Raspbian ( 2018-04-18のイメージがオススメ)
フォーマットツール: SDFormatter
SSHツール: PuTTY (Windowsユーザー向け)
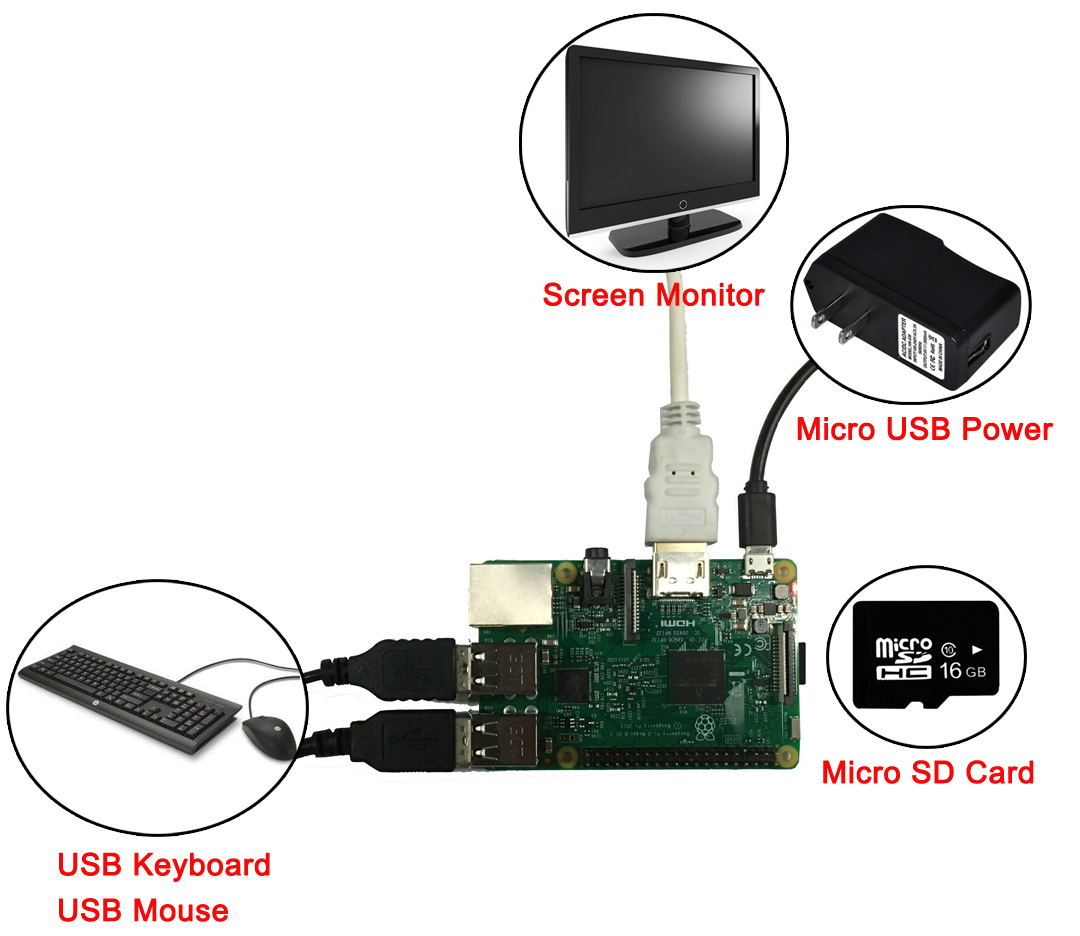
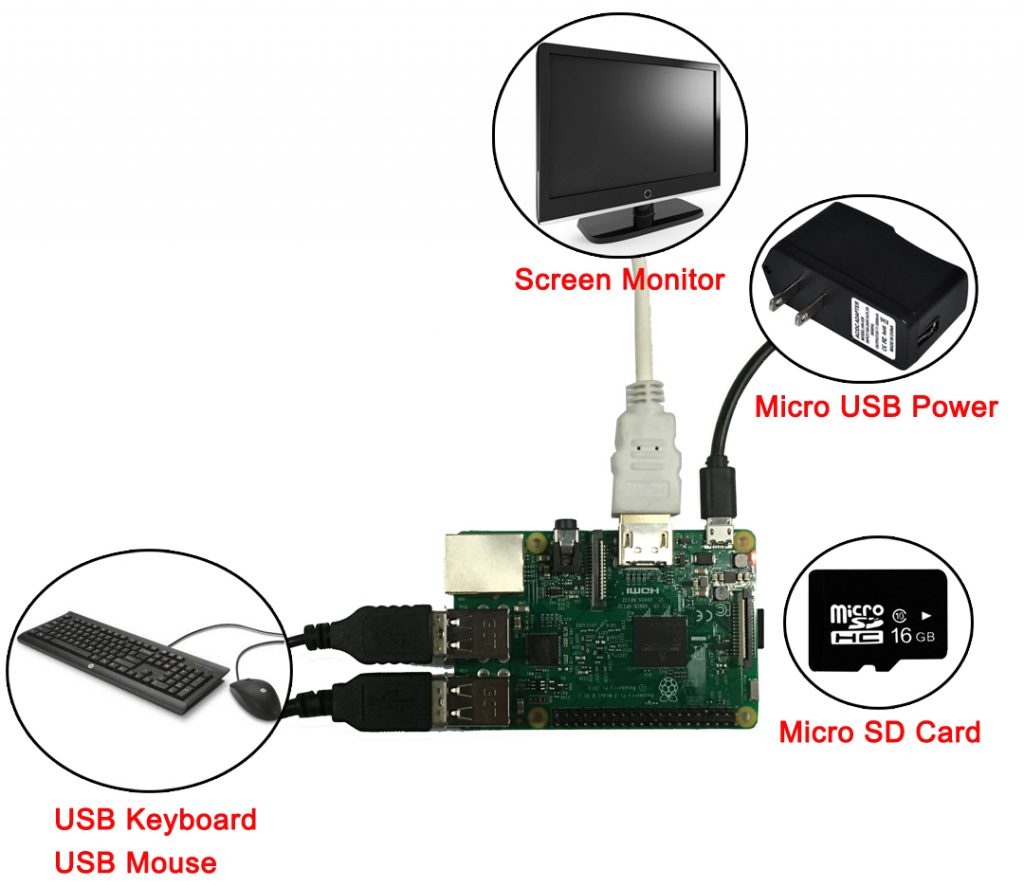
ステップ0:Raspberry Piに接続する前に、Raspbian Operation System(OS)をSDカードにインストールする必要があります(SDカードにOsoyoo Robot Imageがプリインストールされている場合は、このステップをスキップしてください)。公式ウェブサイトhttps://downloads.raspberrypi.org/raspbian/images/でRASPBIANシステムの最新バージョンを選択できます。Win32DiskImager utilityを介して画像をmicroSD / TFカード(最小16G)に書き込み、Raspberry Piのスロットにカードを差し込みます。手順1:Wifiを接続する まず、Raspberry PiをHDMIモニターまたはテレビに接続します。キーボードとマウスをRaspberry Pi USBポートに接続します。Raspberry PiのスロットにSDカードを挿入します。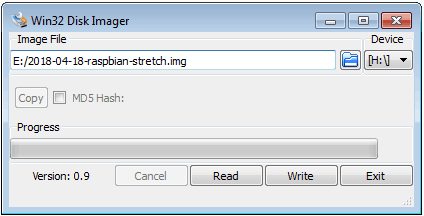 ステップ0: Wifiを接続する
ステップ0: Wifiを接続する
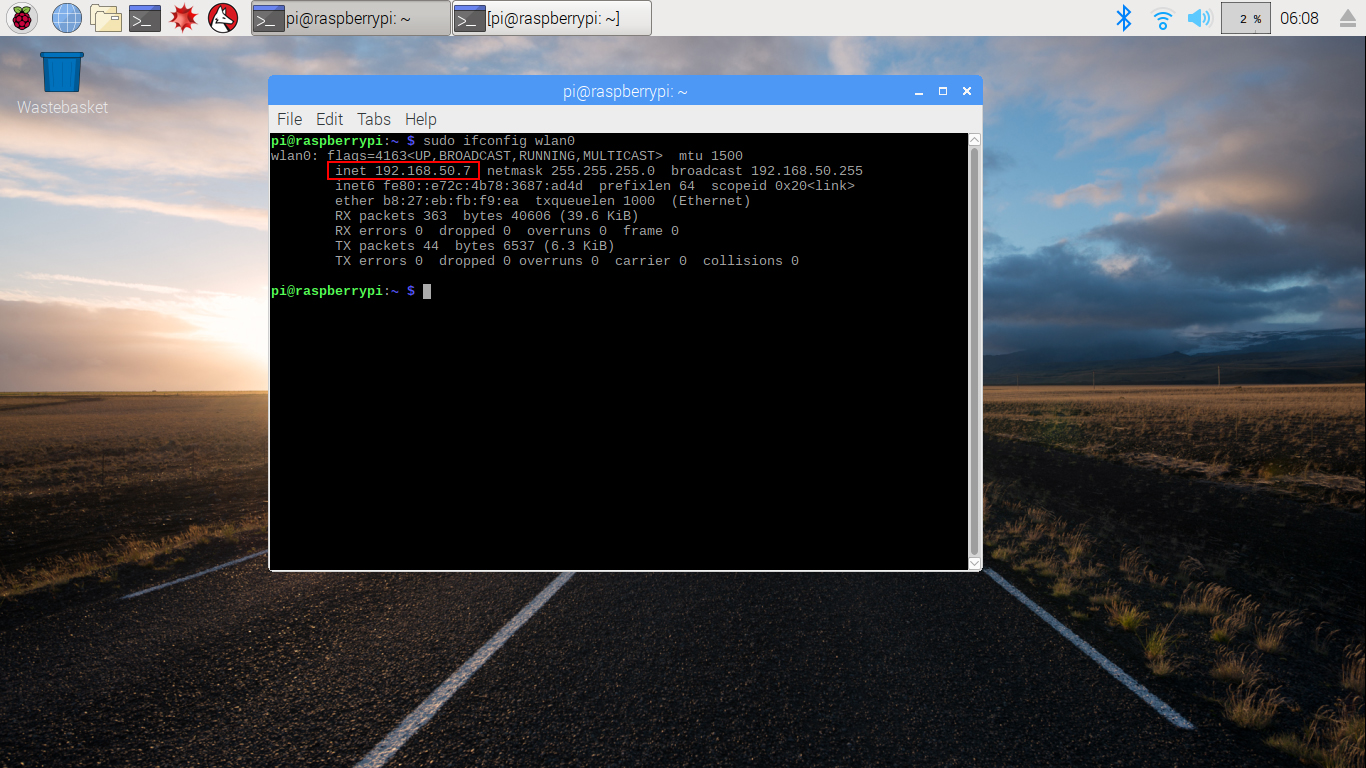
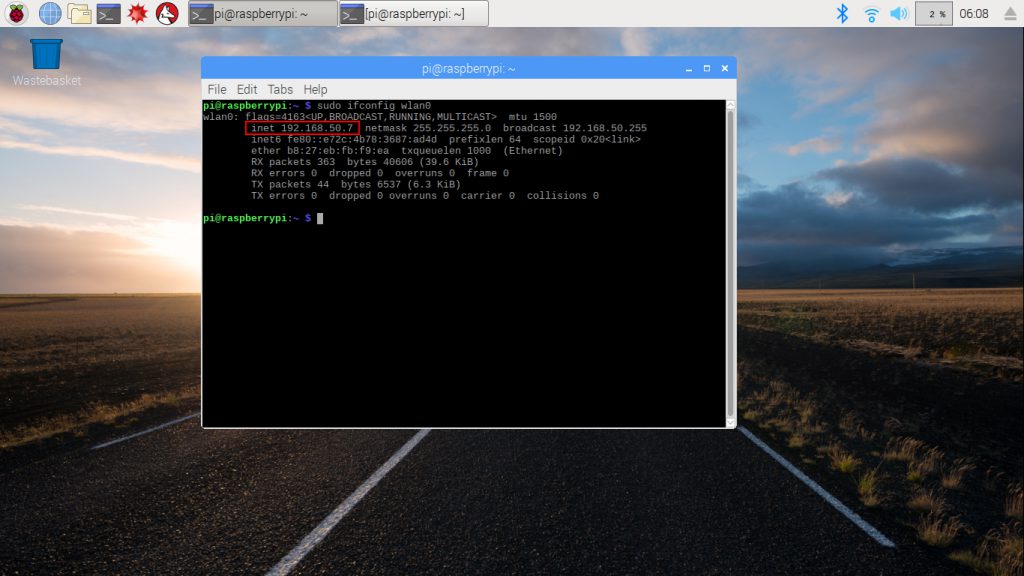
デスクトップの右上にあるワイヤレスアイコンをクリックして、アクセスポイントのリストを表示し、wifi ssidを選択して接続します。PiをWifiに接続したら、マウスをwifiアイコンに合わせてIPアドレスを確認できます。
 または、ターミナルでsudo ifconfig wlan0コマンドを入力できます。ローカルIPアドレスはwlan0ブロックに表示されます(inet addrの右側:)。192.168のようになります……
または、ターミナルでsudo ifconfig wlan0コマンドを入力できます。ローカルIPアドレスはwlan0ブロックに表示されます(inet addrの右側:)。192.168のようになります……
上記のIPアドレスを覚えておいてください。次のステップで使用いたします。
重要な注意:ラズベリーパイロボットカーの画像はSDカードに書き込まれたので、ステップ1に従ってwifiを接続し、ステップ2からステップ5をスキップしてテストPythonコードを直接実行するだけです。
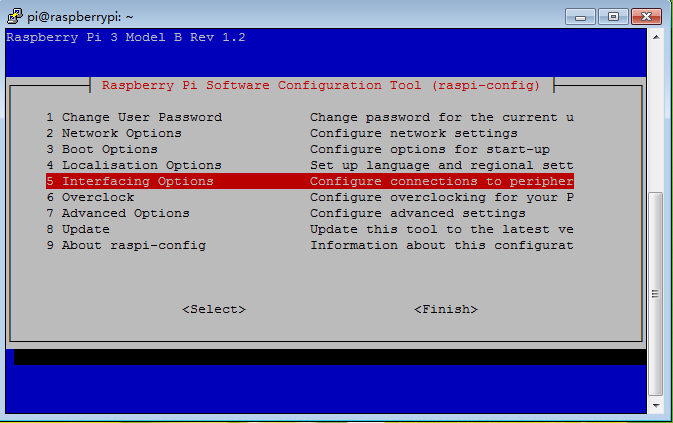
ステップ2:SSH接続を開く
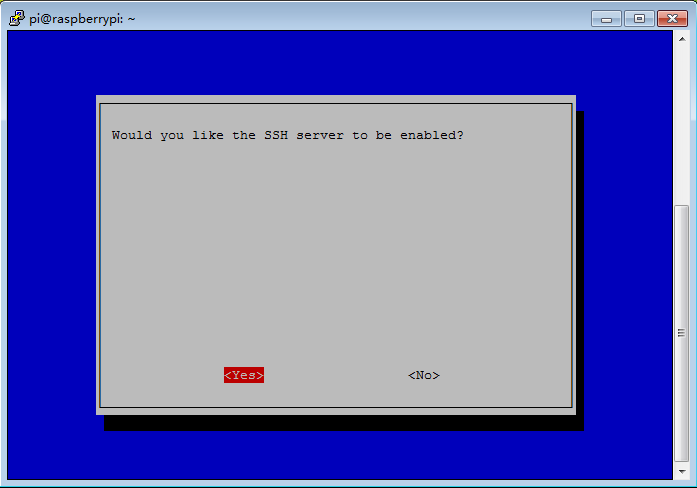
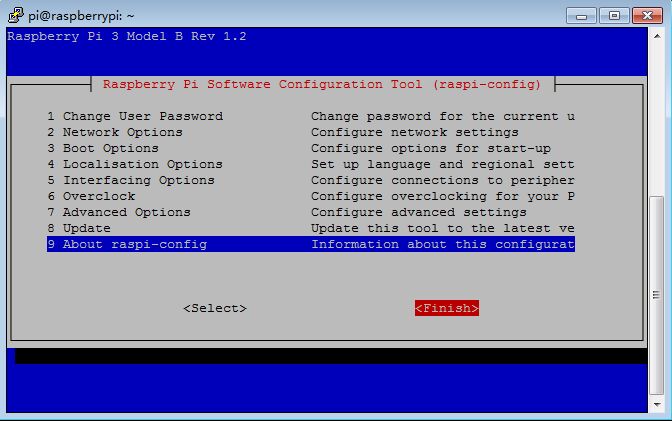
SSHを使用すると、ユーザーはインターネットからリモートでシェルコマンドを入力できるため、wifiを介して車を制御できます。SSH機能を有効にするには、ターミナルから次のコマンドを入力する必要があります。
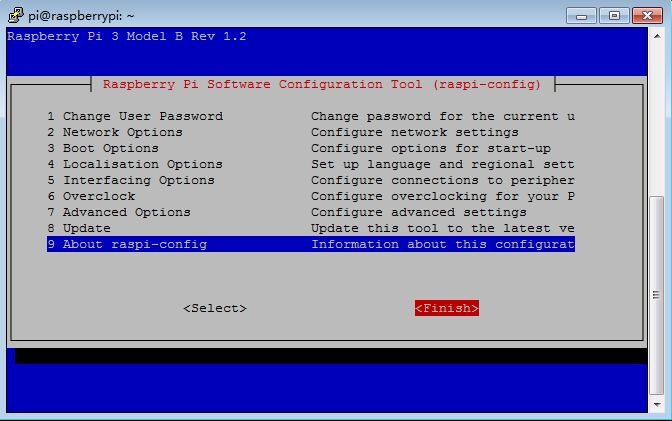
sudo raspi-config
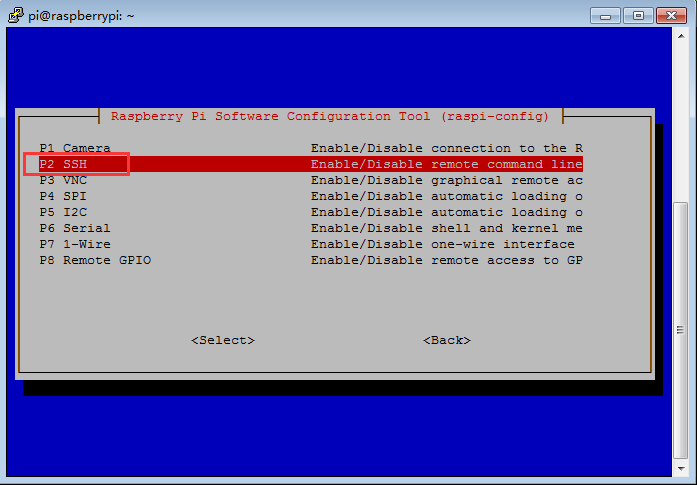
次に、[インターフェースオプション]-> [SSH]-> [はい]-> [OK]-> [完了]を選択します。
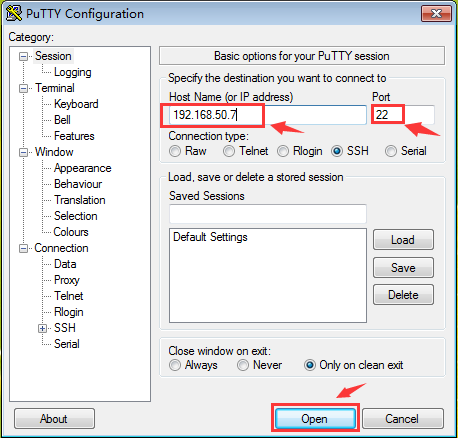
手順3:SSHを使用してRaspberry Pi端末をリモートで接続する
車を自由に動かすには、Raspberry Piをモニター、キーボード/マウスから切断し、SSHを使用してRaspberry Pi端末にリモートでコマンドを送信する必要があります。
Windowsを使用してsshコマンドを送信している場合。Raspberry PiのローカルIPを接続するには、PuTTyと呼ばれる無料のソフトウェアをダウンロードする必要があります(STEP 1から取得)。
MacBookまたは他のLinuxコンピューターを使用している場合は、ssh [email protected]と入力してください。
ssh your_raspberry_pi_local_ip_address
* your_raspberry_pi_local_ip_addressは、STEP 1で取得したwifi IPアドレスを意味します
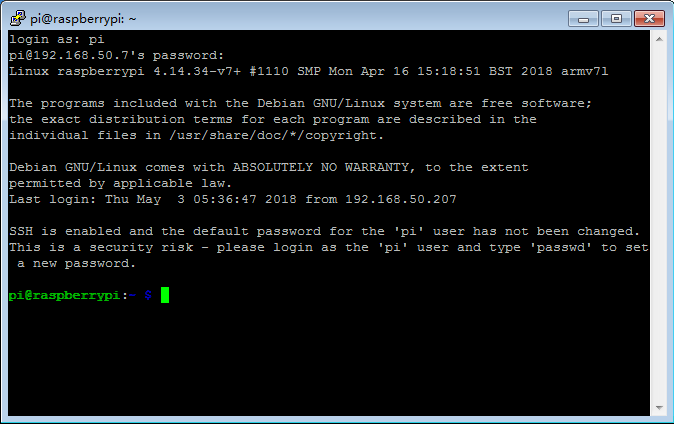
sshに接続するときは、デフォルトのユーザー名pi とデフォルトのパスワードraspberry を使用してRaspberry Piにログインする必要があります。
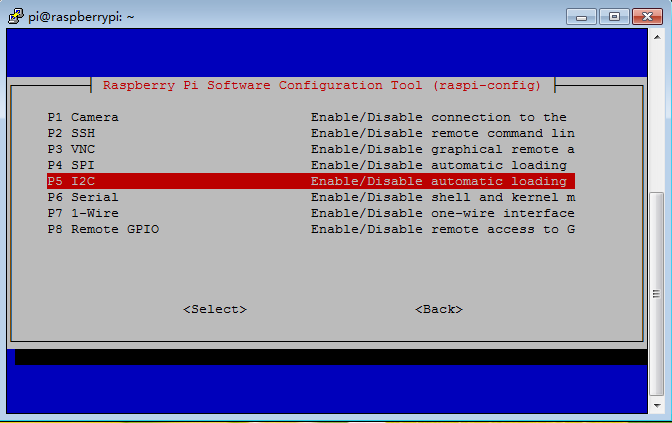
ステップ4:I2C機能を開きます(SDカードにOsoyoo Robot Imageがプリインストールされている場合は、このステップをスキップします)
I2Cは、I2Cデバイスとデータを交換するために使用されるプロトコルです。このプロジェクトでは、I2CデバイスはPCA9685モジュールです。I2C機能を使用するには、ターミナルから次のコマンドを入力する必要があります。
sudo raspi-config
次に、[インターフェースオプション]-> [I2C]-> [はい]-> [OK]-> [完了]を選択します
ステップ5:GPIOライブラリをインストールします(SDカードにOsoyoo Robot Imageがプリインストールされている場合は、このステップをスキップしてください)
- (1)次の端末コマンドを入力して、Rasbianリポジトリを更新します
cd ~
sudo apt-get update
- (2)python-pip、python-sumbusおよびgithubをインストールします
sudo apt-get install build-essential python-pip python-dev python-smbus git
- (3)次の端末コマンドを入力してGPIOライブラリをインストールします
git clone https://github.com/adafruit/Adafruit_Python_GPIO.git
cd Adafruit_Python_GPIO
sudo python setup.py install
- (4)次の端末コマンドを入力して、インストールファイルを削除し、ディスク容量を節約します
cd ~
sudo rm -fr Adafruit_Python_GPIO
以前のインストールのテスト(SDカードにOsoyoo Robot Imageがプリインストールされている場合は、この手順をスキップしてください)
- (5)次のコマンドを入力して、テストPythonコードをダウンロードします
cd ~
mkdir osoyoo-robot/
cd osoyoo-robot/
wget http://osoyoo.com/driver/motor-test.tar.gz
tar -zxvf motor-test.tar.gz
起動テスト
ステップ6:Pythonコードのテストを実行する
cd ~/osoyoo-robot/motor-test
python motor-test.py
注意事項:ラズベリーパイロボットカーのSDカードにサンプル用イーメジが書き込まれましたので、wifiを接続してPythonサンプルコードを起動を準備するだけです。
pythonサンプルコードの上で実行した後、車は2秒間前進し、2秒間後退し、2秒間左に曲がり、最後に2秒間右に曲がります。
上記のシナリオに従って車が動かない場合は、インストールに問題があるはずです。前の手順に従って、ワイヤ接続とソフトウェアのインストールを再確認する必要があります。