

| 米国から購入 |
英国から購入 |
DEから購入 |
ITから購入 |
FRから購入 |
ESから購入 |
JPから購入 |
 |
 |
 |
 |
 |
 |
 |

編集中************
*目的:
このプロジェクトでは、トラッキング(黒/白)センサーを使用して、簡単なラインフォロワーロボットカーを設計します。ラインフォローロボットとは、その名の通り、白い地面に印刷された黒いトラックラインを追いかける自動運転車のことです。ロボットに搭載されたトラッキングセンサーは、逐次車の位置がトラックから外れていないかどうかをチェックし続けます。もしそうでないとき、車を反対方向へ牽き、ロボットカーをトラックの方にに引き戻します。

- OSOYOO UNO Board x1
- OSOYOO Magic I/O シールドx
- OSOYOO トラッキングモジュール x1
- OSOYOO 3-Pin PNP Cable 10cm x 6
- OSOYOO 3-Pin PNP Cable 20cm x 2
- OSOYOO 4-Pin PNP Cable 20cm x 1
- アクリルプラットフォーム x 1
- 2 ホィール付駆動減速ボックス x1
- USB Cable x1

*組立て方
スマートカーの基本フレームワークをレッスン21に沿ってインストールします。レッスン23ですでにインストールが完了している場合は、そのままにしておきます。
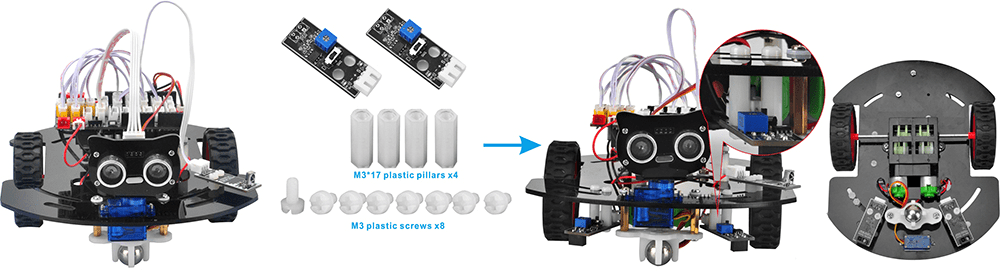
ステップ1:左右のトラッキングセンサーをM3*6プラスティックネジとM3*17プラスティックピラーで取り付けます。各フォトセンサーは最高の感度を得られる様に前部車体と地面の間に取り付けていることを確認する。センサーが白地の上にあると信号表示LEDが点灯し、黒地の上にあると信号表示LEDが消灯します。
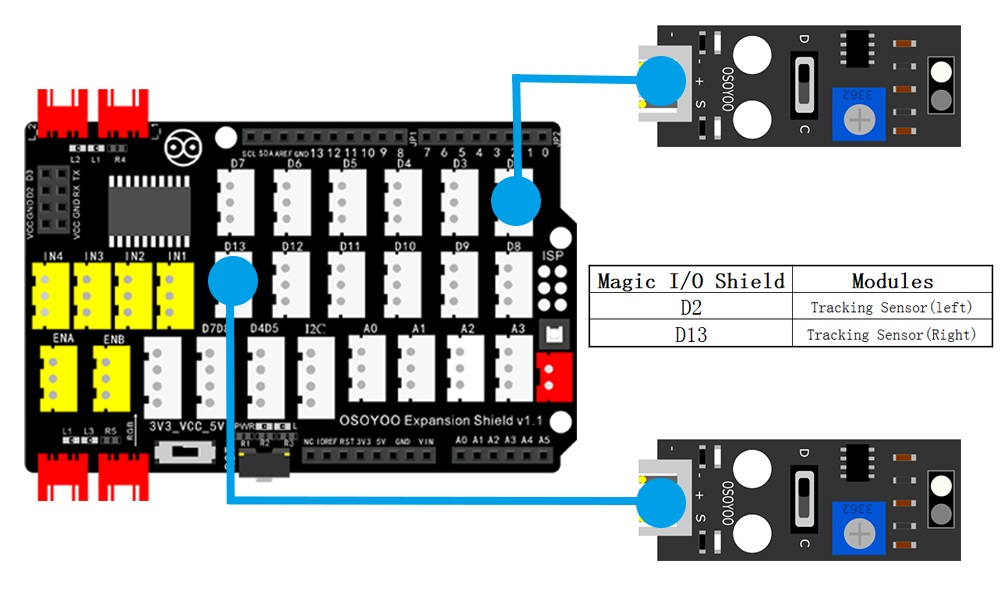
Step 2:続いて、左右のトラッキングセンサーを、Magic I/OシールドのD2ポートとD3ポートに3ピンPNPケーブルで接続します

Notice: Shut off your battery or Unplug your power adapter when upload sketch code to アルドゥイーノ.
*注意:アルドゥイーノにスケッチコードをアップロードする際には、バッテリーをオフにするか、電源アダプターを抜いてください。
上記のインストールが完了したら、USBケーブルを使ってアルドゥイーノボードをコンピュータに接続します。コードを直接ダウンロードして、Mixlyの “Open “をクリックして、ダウンロードしたコードを選択することもできます。
コードをダウンロードするか、
また、以下のような操作も可能です。
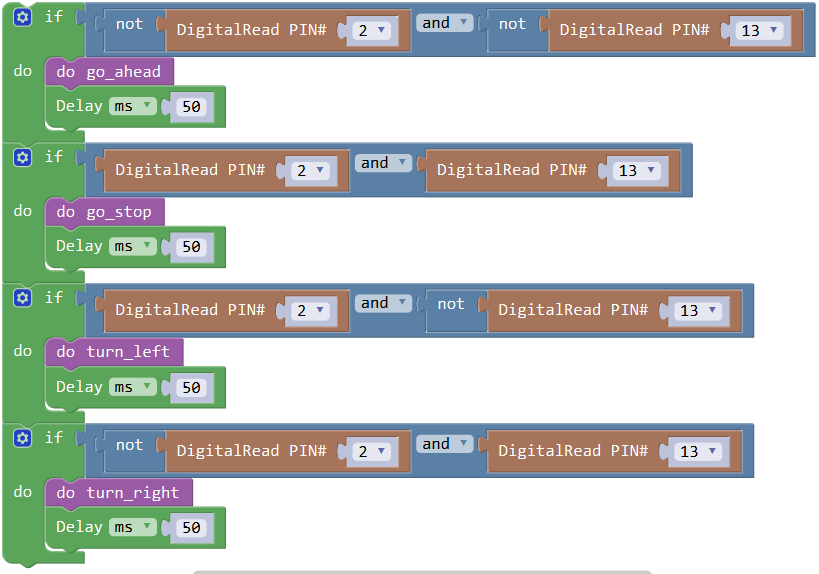
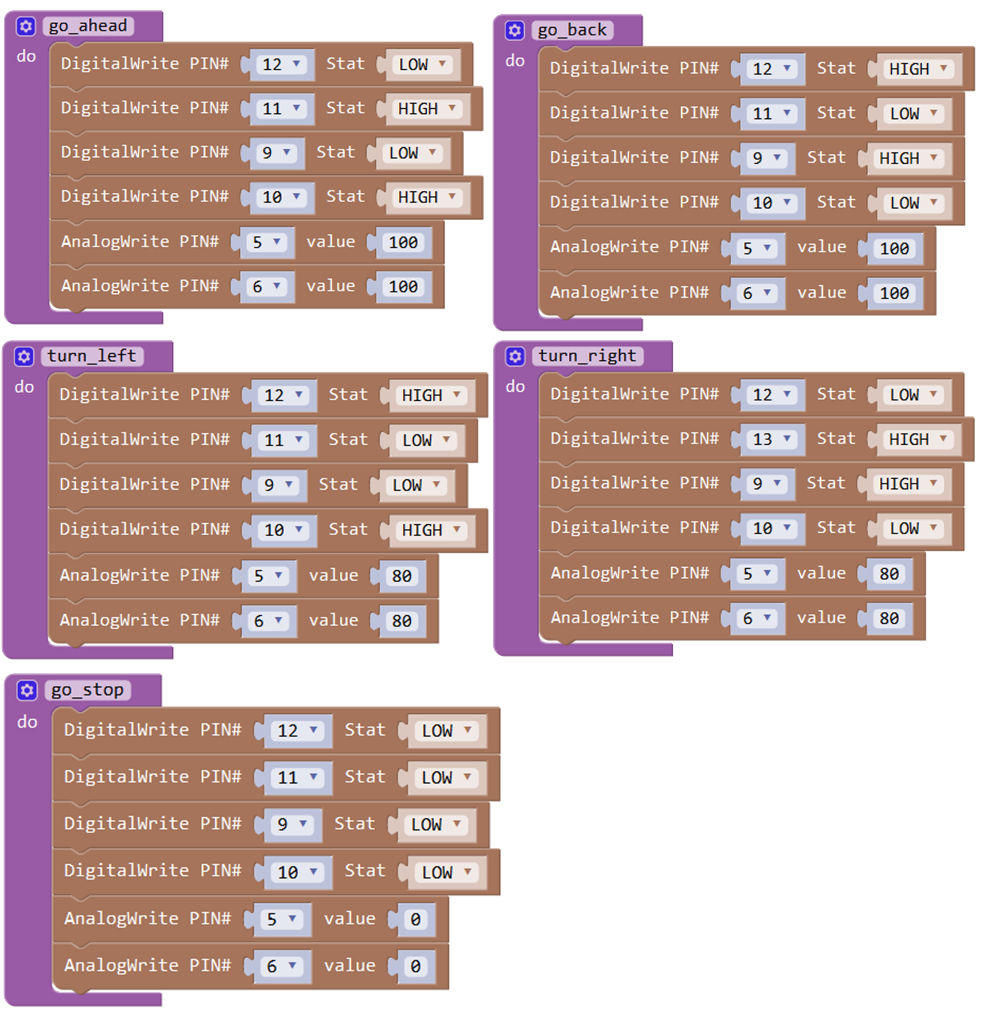
グラフィカル・プログラミング・ソフトウェア「Mixly」を起動して、以下のようなグラフィック操作を行う。最後に、プログラムを保存してアルドゥイーノボードにアップロードします。

*プレイの方法
前のレッスン20では、感度の調整とトラッキング・センサーの使い方を学びました。.トラッキング・センサー・モジュールの感度を調整します。車の電源を入れたまま、クロスドライバーでトラッキングセンサーのポテンショメーターを最適な感度状態になるまで調整します。センサーが白地の上にあると信号表示LEDライトが点灯し、センサーが黒地の上にあると信号表示LEDライトが消えます、
白地に黒いトラック(黒いトラックの幅は30mm以上60mm以下)を用意します。なお、トラックの曲がり角(カーブ)は、90度以上の急激なものにしないでください。旋回が急すぎると、車はトラックから外れてしまいます。
車の電源を入れ、トラッキングセンサーモジュールの真ん中を黒いトラックに向けて置くと、車は黒いトラックに沿って動きます。










