正規オンライン販売店:
| Buy from USA |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

前回のレッスンでは、ADCピンからアナログデータを読み取る方法を学びました。今回のレッスンでも、ADC2ピンからアナログ信号を読み取ります。ただし、今回の入力デバイスは、フォトレジスタではなく可変抵抗器(ポテンショメータ)です。また、PWM信号を生成できるGP16にサーボモータを接続します。ポテンショメータを回転させると、サーボがアームを回転させます。このプロジェクトを通じて、サーボブロックを使用してサーボアームを回転させる方法を学びます。

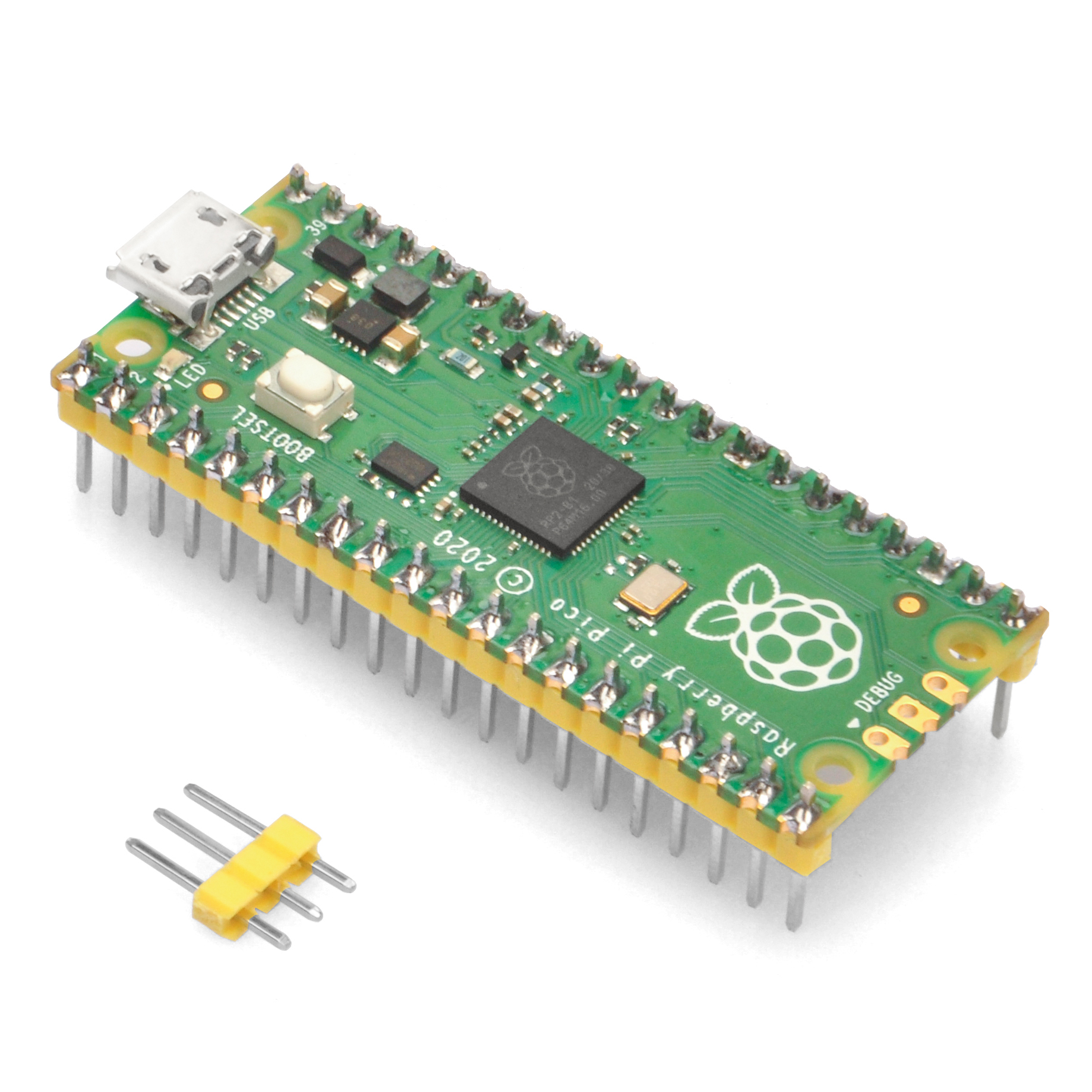
・Raspberry Pi PicoボードとmicroUSBケーブル
・Thonny Python IDEを実行するためのコンピュータ
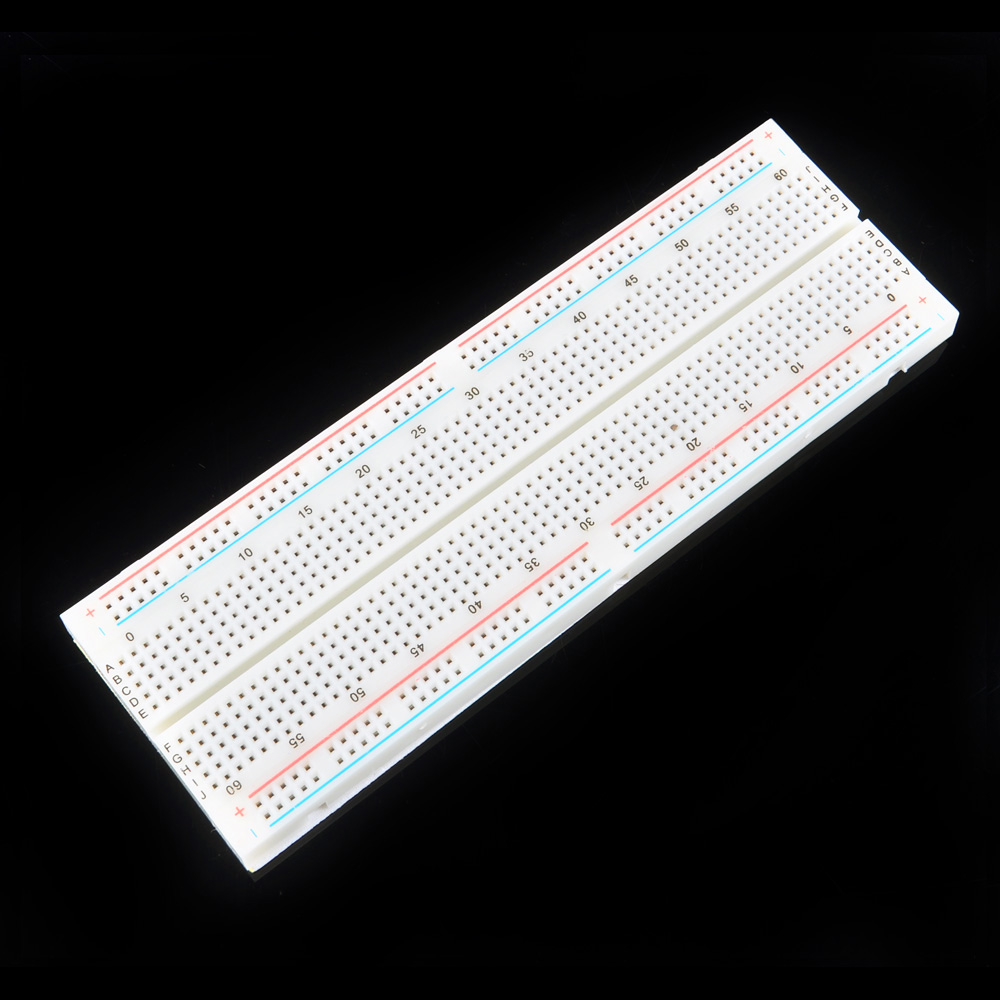
・ブレッドボード×1
・ポテンショメータ×1
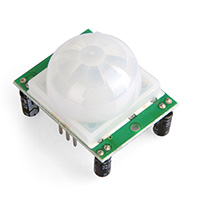
・サーボモータ×1
・ジャンパーワイヤー数本

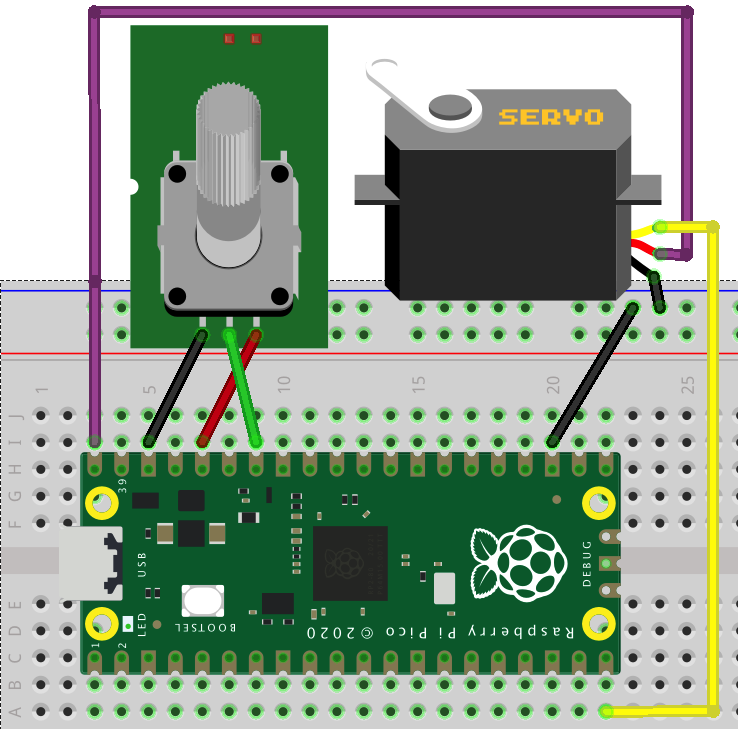
回路図には次のようにあります。
・サーボの赤いワイヤーをPico Vbusピン(5V)に接続
・サーボの茶色のワイヤーをPico GNDに接続
・サーボの黄色いワイヤーをPico PWMピン(GP16)に接続
・ポテンショメータのGNDをPico GNDに接続
・ポテンショメータのVCCをPico 3.3Vに接続
・ポテンショメータの中央のピンをPico ADCピン(GP28)に接続

ブロックを作成する手順
Step 1: 新しいプロジェクトを作成し、Picoをシリアルポートに接続する
1)新しいプロジェクトアイコンをクリックします。ファンシーな名前のMy Projectアイコンが表示されます(図2.1を参照)。
2)My Projectsの新しいアイコンをクリックします。

これで、新しいグラフィックプログラミングページに入ります。ページの下部にあるCONNECTボタンをクリックし、Picoボードをプロジェクトに接続してください。
3)ブラウザがシリアルポートのオプションメニューを表示します。メニューからPicoを選択し、接続ボタンをクリックしてください。
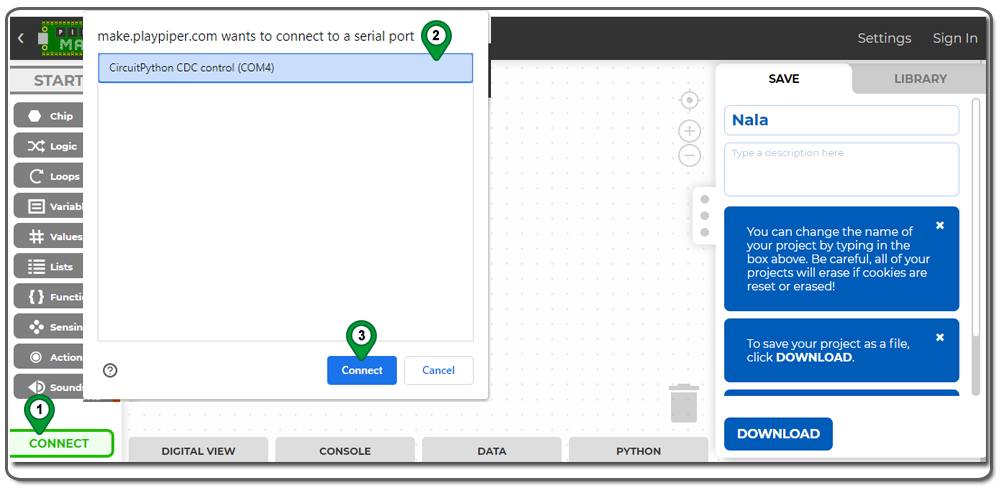
もしシリアルポートメニューにPicoが表示されない場合は、Picoが正しく設定されていないことを意味しています。Lesson 1, Step 1に戻って、Picoを再度設定する必要があります。
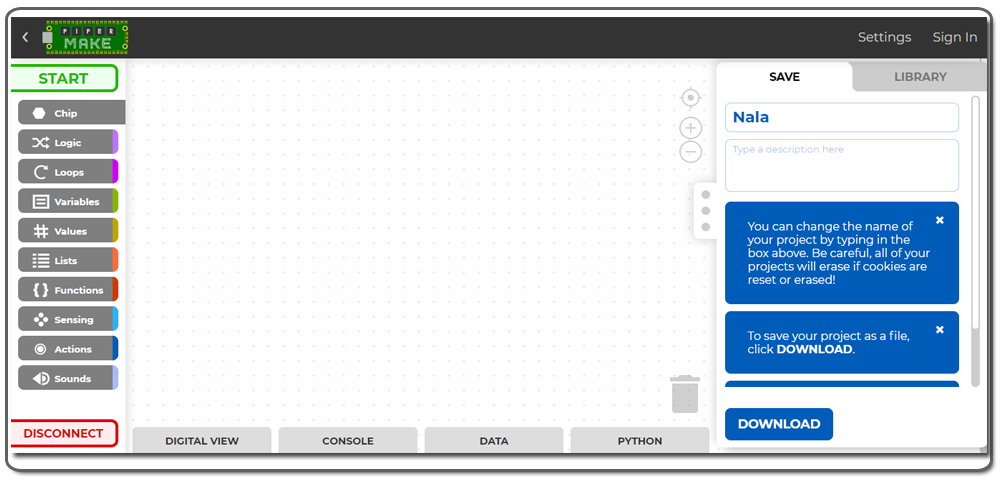
Picoをシリアルポートに接続した後、GUI ConnectボタンはDisconnectボタンに切り替わります。次の手順でビルドグラフィックコーディングチップを実行します。
Step 2: グラフィックコーディングチップのビルド
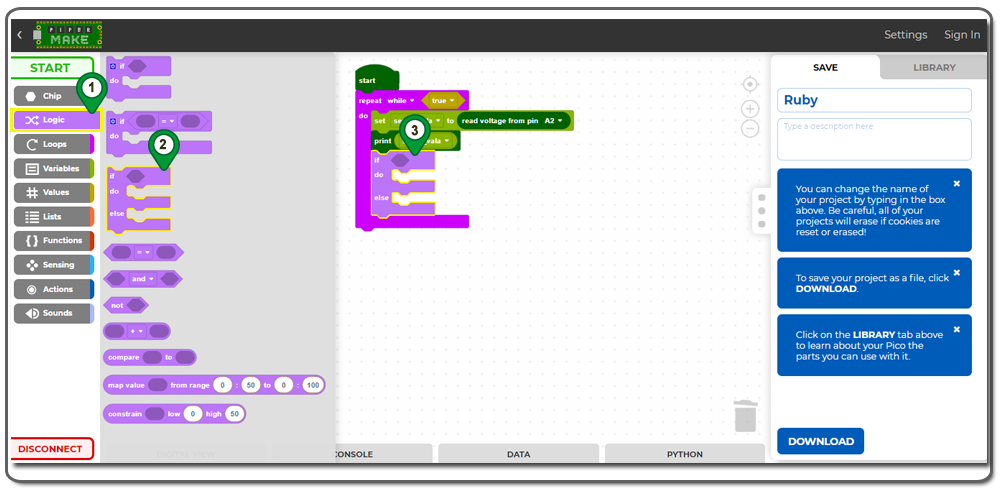
1)Chip->Startをクリックし、次のようにStartチップをコーディングエリアに移動します。
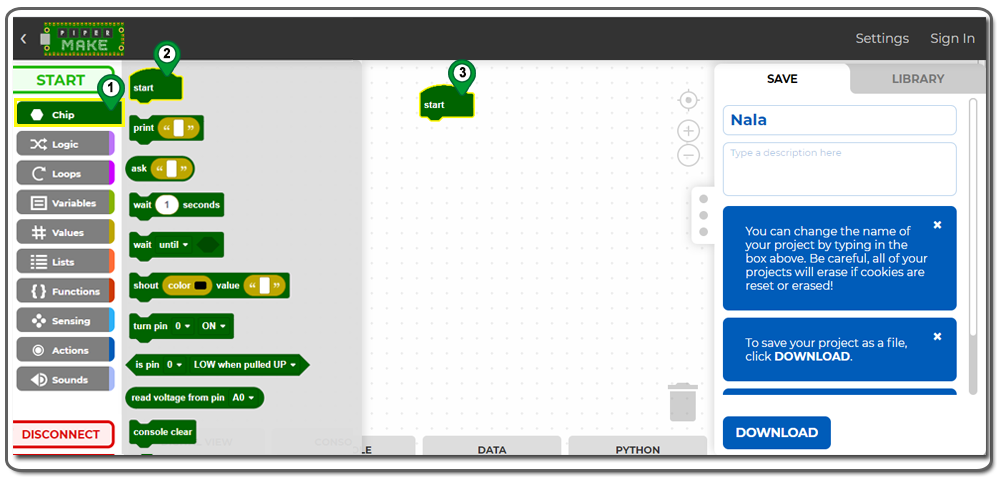
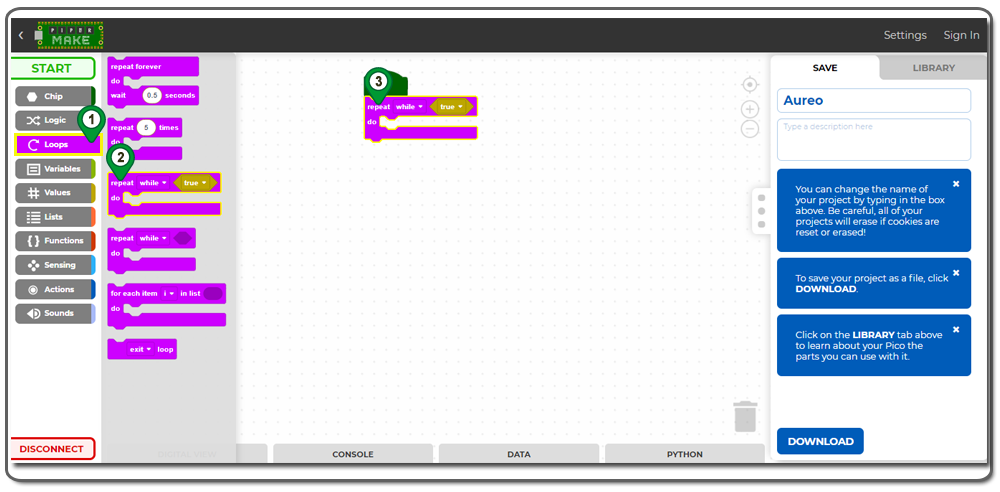
2)Loops->Repeat while trueをクリックし、Startブロックのすぐ下にこのブロックを移動します。
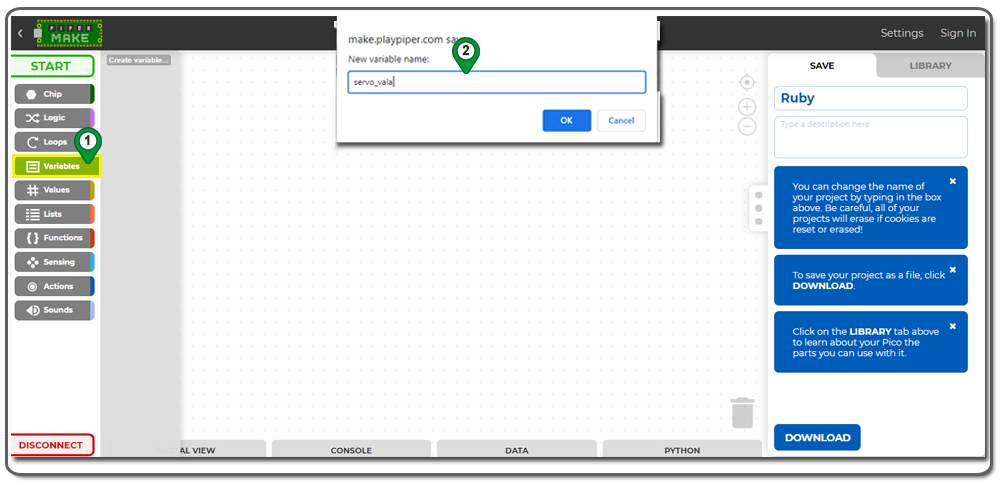
3)Variables->Create Variableをクリックし、次のように変数「servo_val」という名前の変数を作成します。
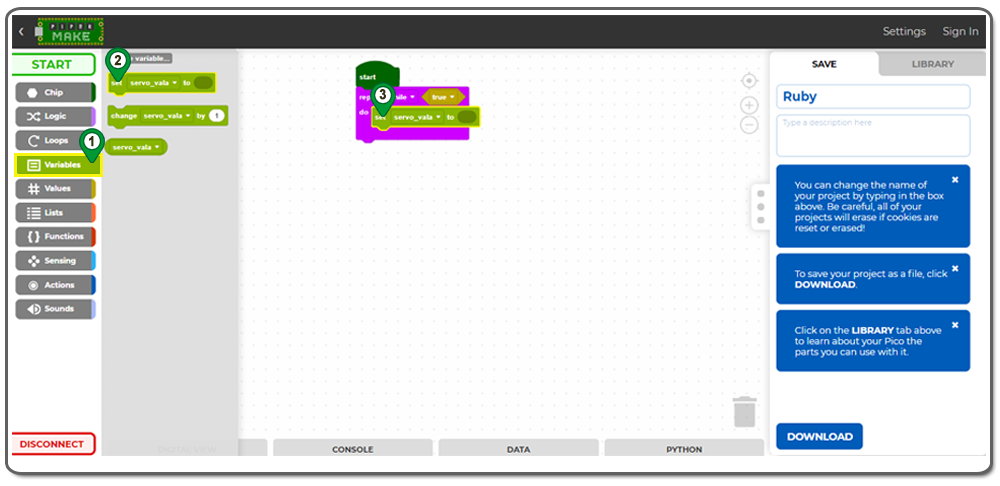
4)これで、いくつかの新しい変数ブロックが表示されます。ループブロックの中に「set servo_val to」ブロックを移動します。
5)Chipカテゴリから、「Read Voltage」ブロックを「set servo_val to」ブロックに追加します。ポートをA0からA2に変更します。
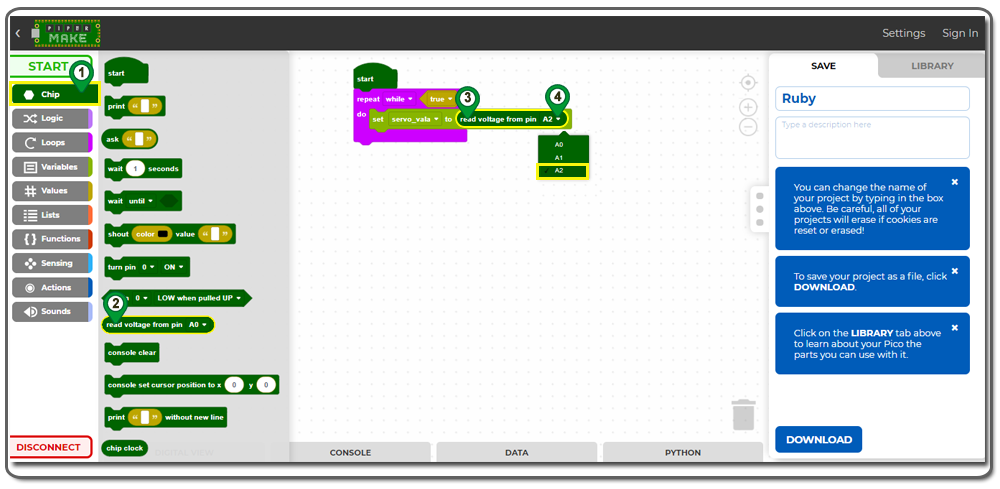
説明:このブロックは、ADC2ピン(GP28)から電圧値を読み取り、「servo_val」変数に値を割り当てます。
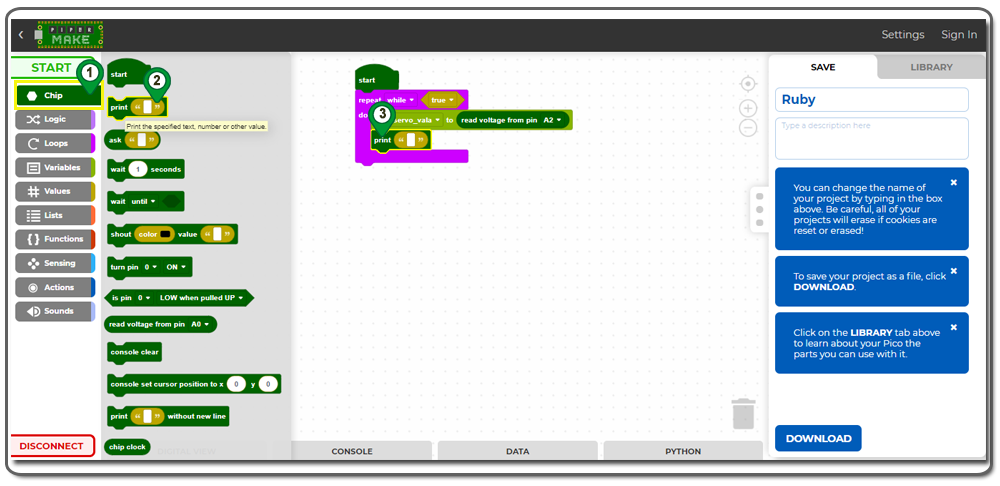
6)Chipカテゴリから、「Print」ブロックを「set servo_val to」ブロックの下に追加します。
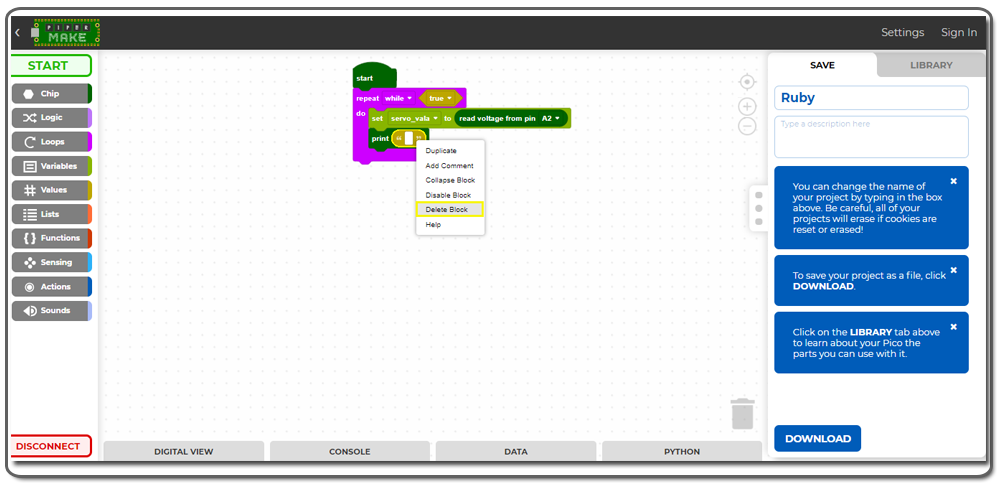
7)Printブロック内部の「」黄色ブロックを右クリックして削除します。
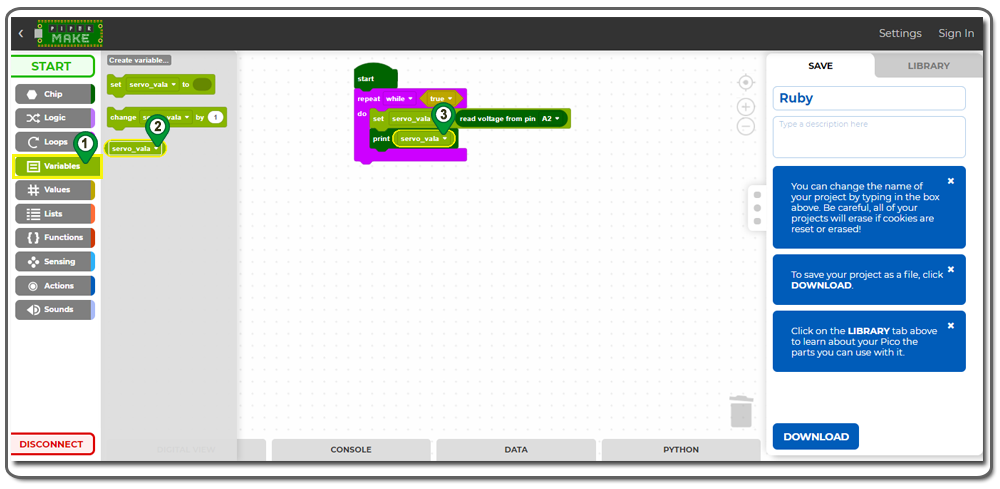
8)Variableカテゴリから、「servo_val」ブロックをPrintブロックに追加します。
9)Logicカテゴリから、「if_do_else」ブロックをPrintブロックの下に追加します。
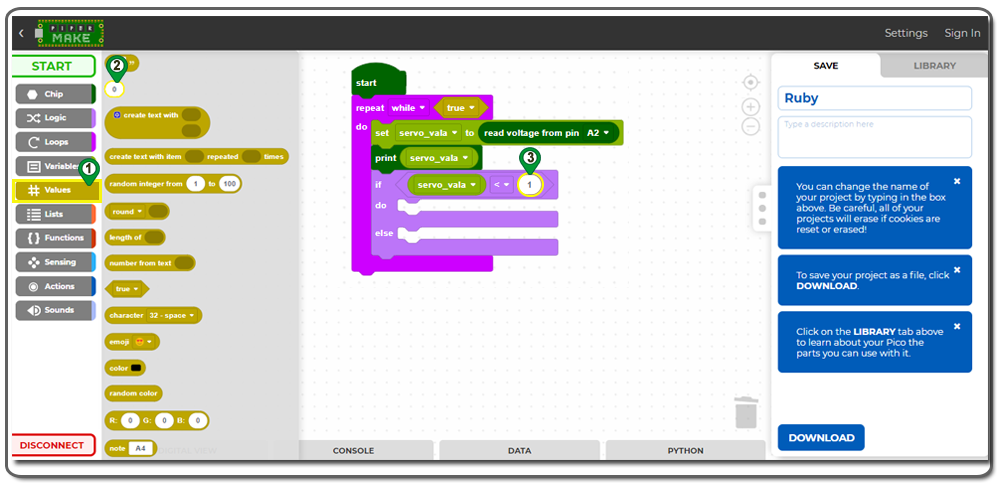
10)「if」ブロックに「=」ブロックを追加します。

11)Variablesカテゴリから、「if」ブロックに「servo_val」ブロックを追加し、「=」記号を「<」に変更します。

12)Valuesカテゴリから、「if」ブロックに「0」ブロックを追加し、ブロックの値を0から1に変更します。
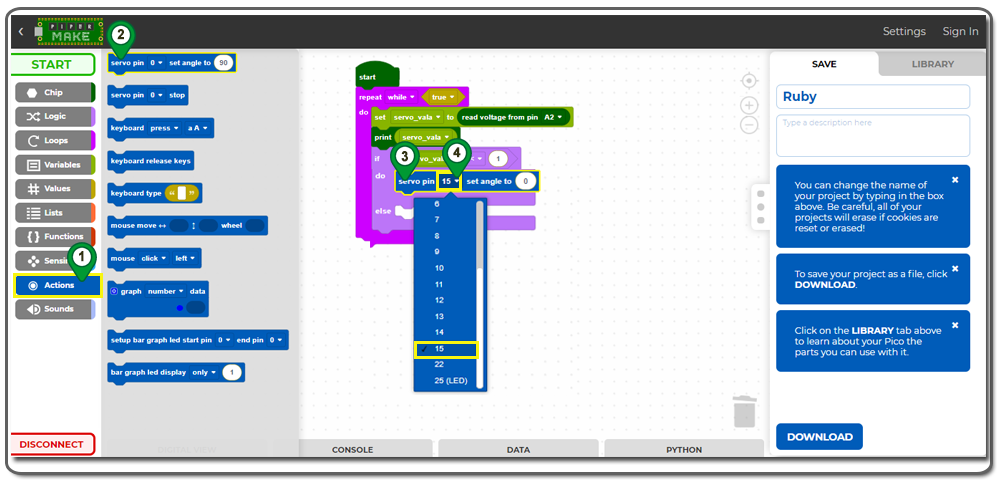
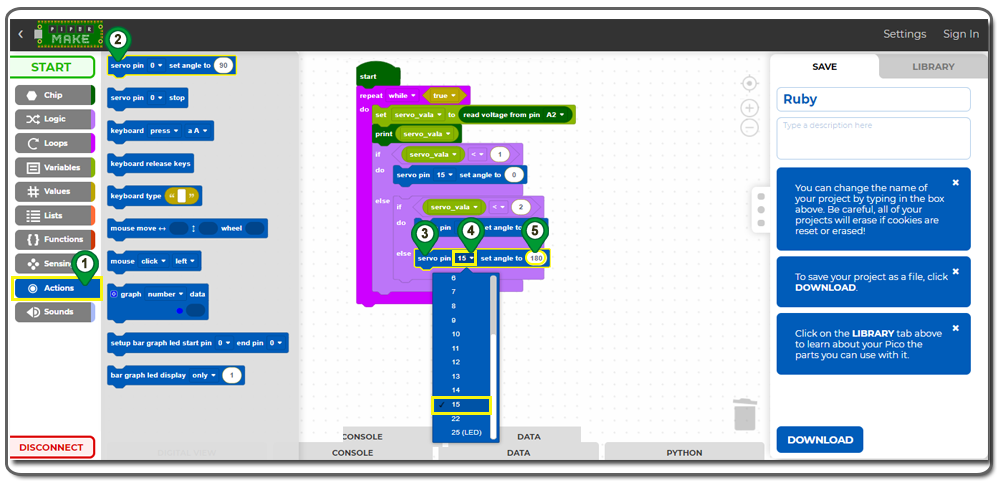
13)Actionカテゴリから、「servo pin set angle to」ブロックを「do」エリアに追加し、ピン番号を0から15に変更し、角度を90から0に変更します。
14)ライトパープルのエリアで右クリックして、新しい「if_do_else」ブロックを複製し、新しいブロックを「else」エリアに挿入します。「if」ステートメントエリアを<1から<2に変更し、「角度を設定する」エリアを0から90に変更します。
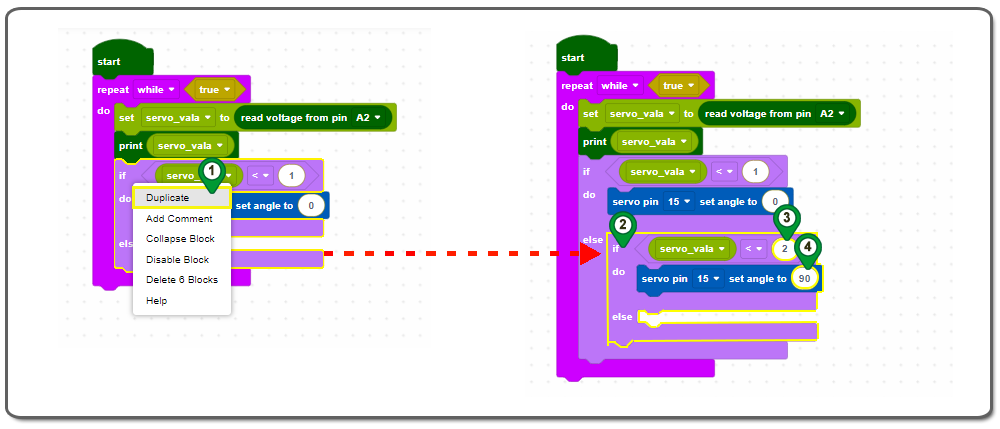
15)アクションカテゴリから、「servo pin set angle to」ブロックを「else」エリアに追加し、ピン番号を0から15に変更し、角度を90から180に変更します。
16)チップカテゴリから、外側の「if_do_else」ブロックの下に「Wait 1 second」ブロックを追加し、待機時間を1から0.5に変更します。
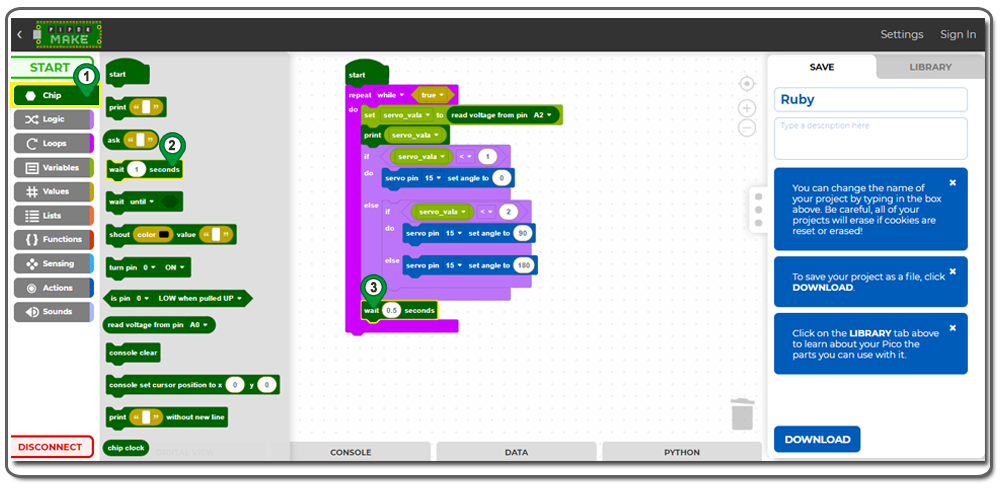
以上でプログラムの構築が完了しました。「START」ボタンをクリックして、プログラムを実行することができます。
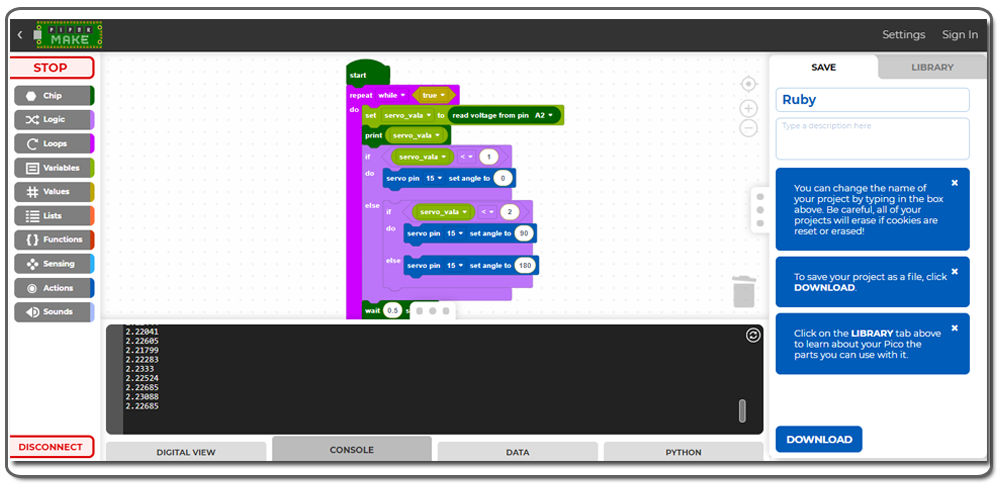
Step 3:プログラムのテスト
ポテンショメーターを回転させると、サーボアームがそれに応じて回転します。下部の「Console」タグをクリックすると、ポテンショメーターを回転させる限り、コンソールが値の変化を表示します。
SKU:2021005900のパーツについてもっと学びましょう。