ユーザーマニュアルは、以下からダウンロードできます:

このチュートリアルでは、車を使って簡単な動きをしてみます。車のインストールが完了したら、インストールとサンプルコードをテストすることが非常に重要です。このレッスンのテスト動作に合格していれば、OSOYOO Basic Board for Arduino、モーターコントロールモジュール、モーター、バッテリー、シャーシ、これらのパーツ間のワイヤ接続がすべてうまく機能していることを意味します。
車のフレームが完成していない場合は、見直してください レッスン1


接続: (注意:ENA/ENB/IN1/IN2/IN3/IN4には、6つのジャンパーキャップがあります。)
IN1 to D12 (ジャンパーキャップ)
IN2 to D11 (ジャンパーキャップ)
モーター→L1
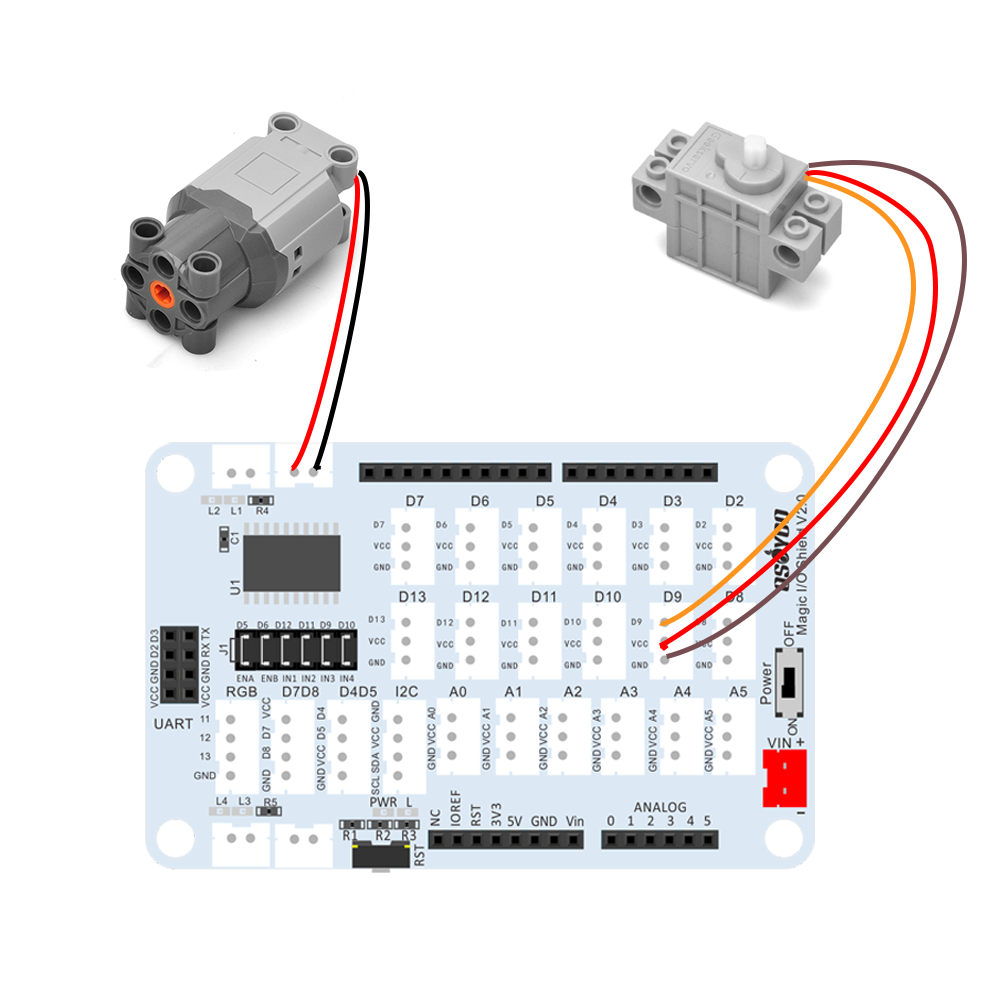
サーボをD9に接続
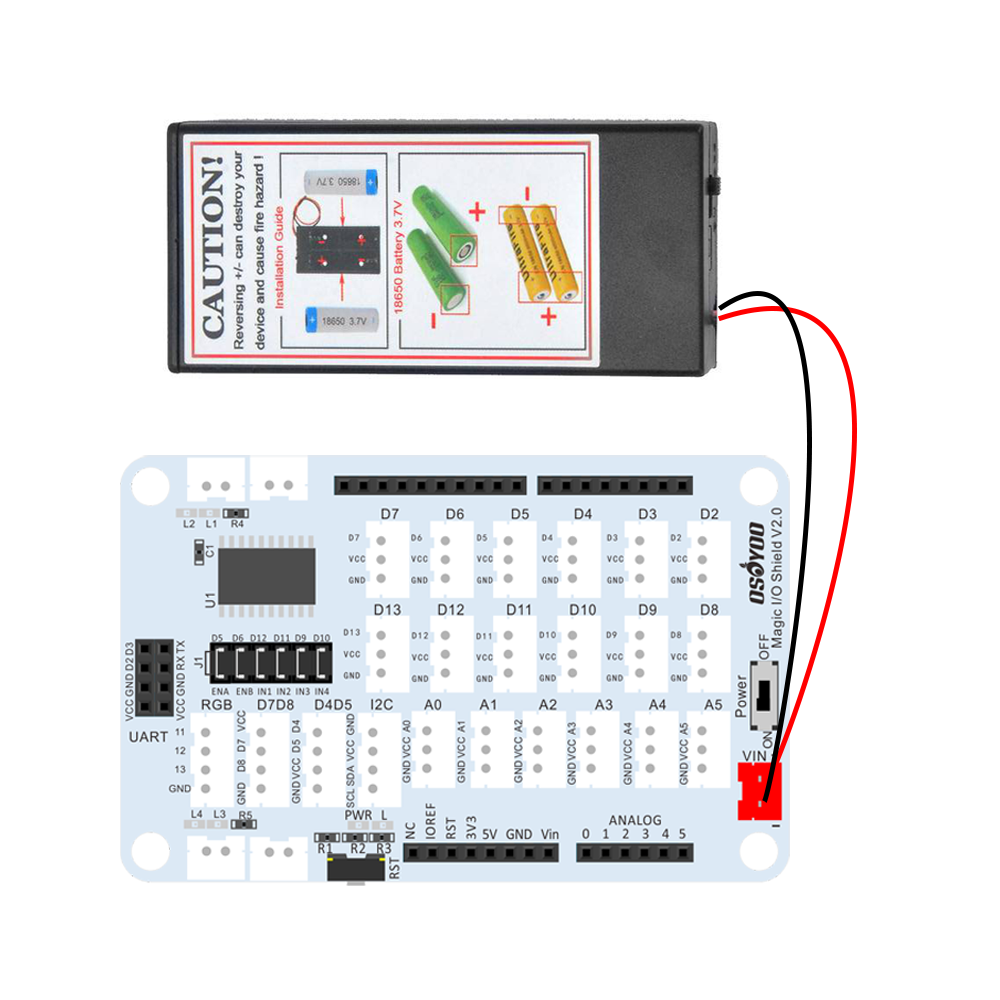
電池ケースをマジックI/Oシールドの電源ポートに以下のように接続します:
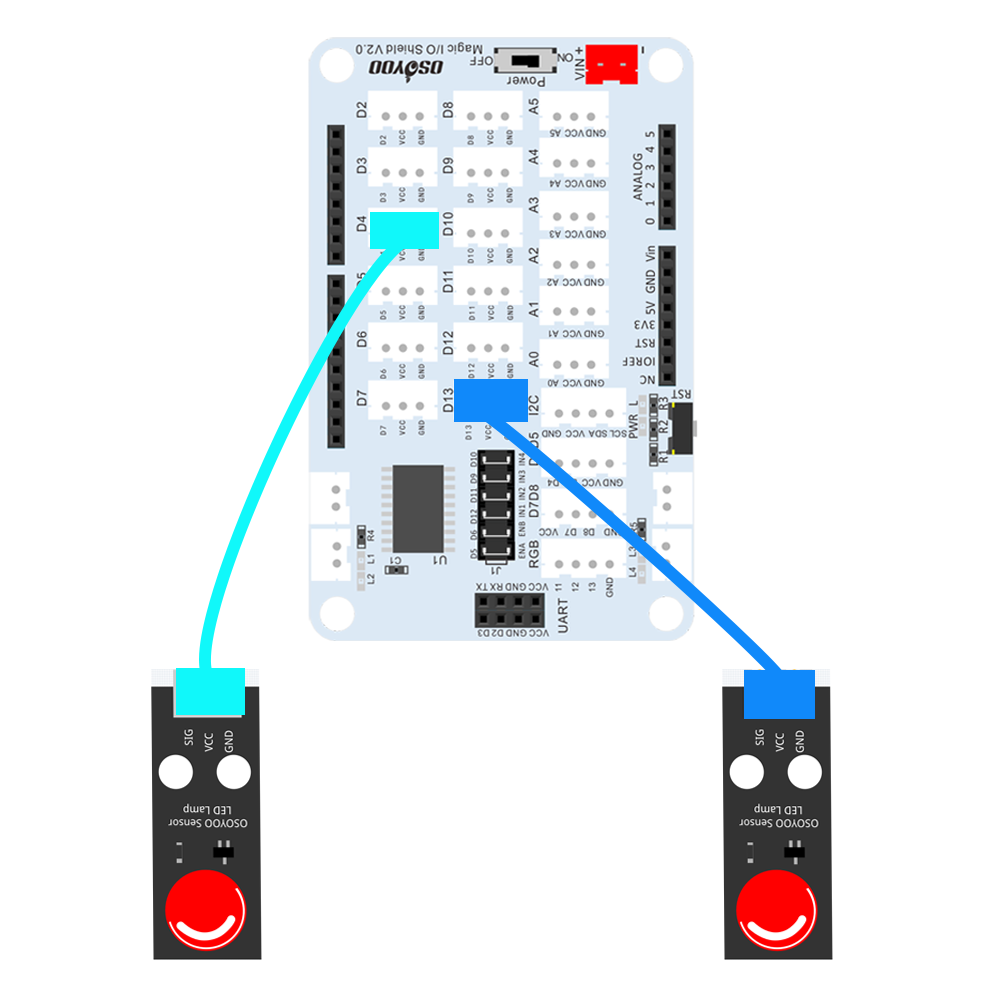
OSOYOO Red LED ModuleをMagic I/Oシールドの電源ポートに以下のように接続してください:
左LED – D4
右LED – D13

ステップ1:
最新のIDEをインストールします(IDEのバージョンが1.1.16以降の場合は、このステップをスキップしてください)。
https://www.arduino.cc/en/software からIDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:
ダウンロードPWMServoライブラリzipファイルから https://osoyoo.com/driver/sg90car/PWMServo.zip ,
次に、Arduino IDEにライブラリをインポートします(Arduino IDEを開く->スケッチをクリック->ライブラリを含める->.Zipライブラリを追加する)。

あなたはポップアップウィンドウが表示されます、今、あなたのダウンロードフォルダに移動し、PWMServo.zipファイルを選択し、Arduinoのライブラリにこのファイルをアップロードすることができます。
ステップ3:
https://osoyoo.com/driver/2022008400/lesson2.zip をダウンロードし、解凍すると、lesson2というフォルダが表示されます。
ステップ4:
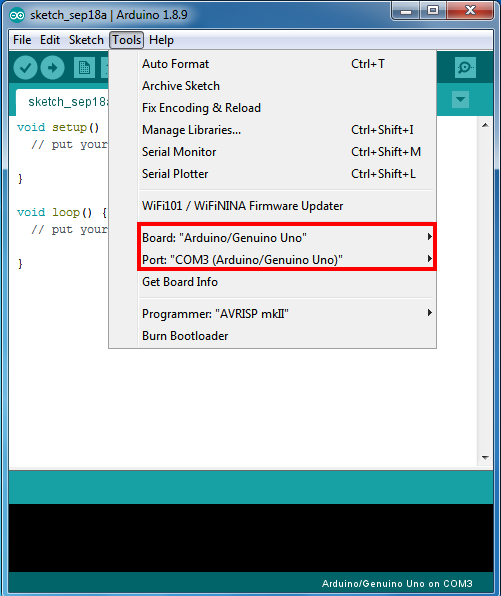
UNO R3ボードをUSBケーブルでPCに接続し、IDEを開いて、プロジェクトに対応するボード/ポートを選択します。
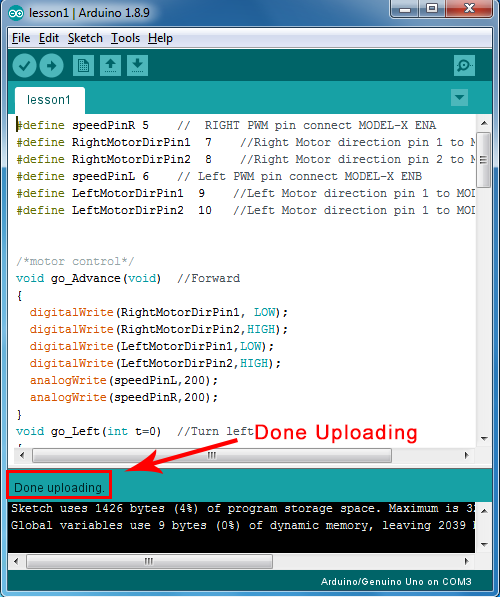
注意事項 スケッチコードをOSOYOO Basic Board for Arduinoにアップロードするときは、バッテリーを切るか、電源アダプタを抜いてください。
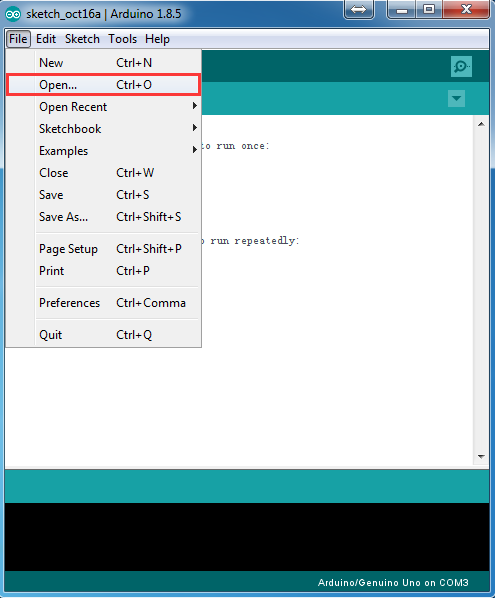
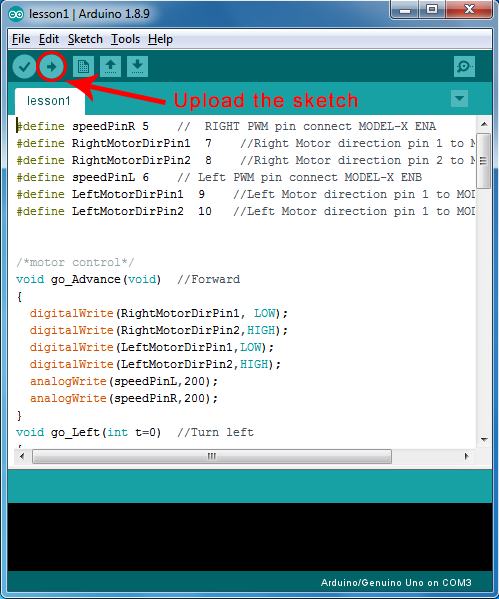
ファイルをクリックし、開くをクリックし、コード “lesson2.ino “を選択し、コードをOSOYOO Basic Board for Arduinoにロードし、スケッチをボードにアップロードします。
ステップ5:
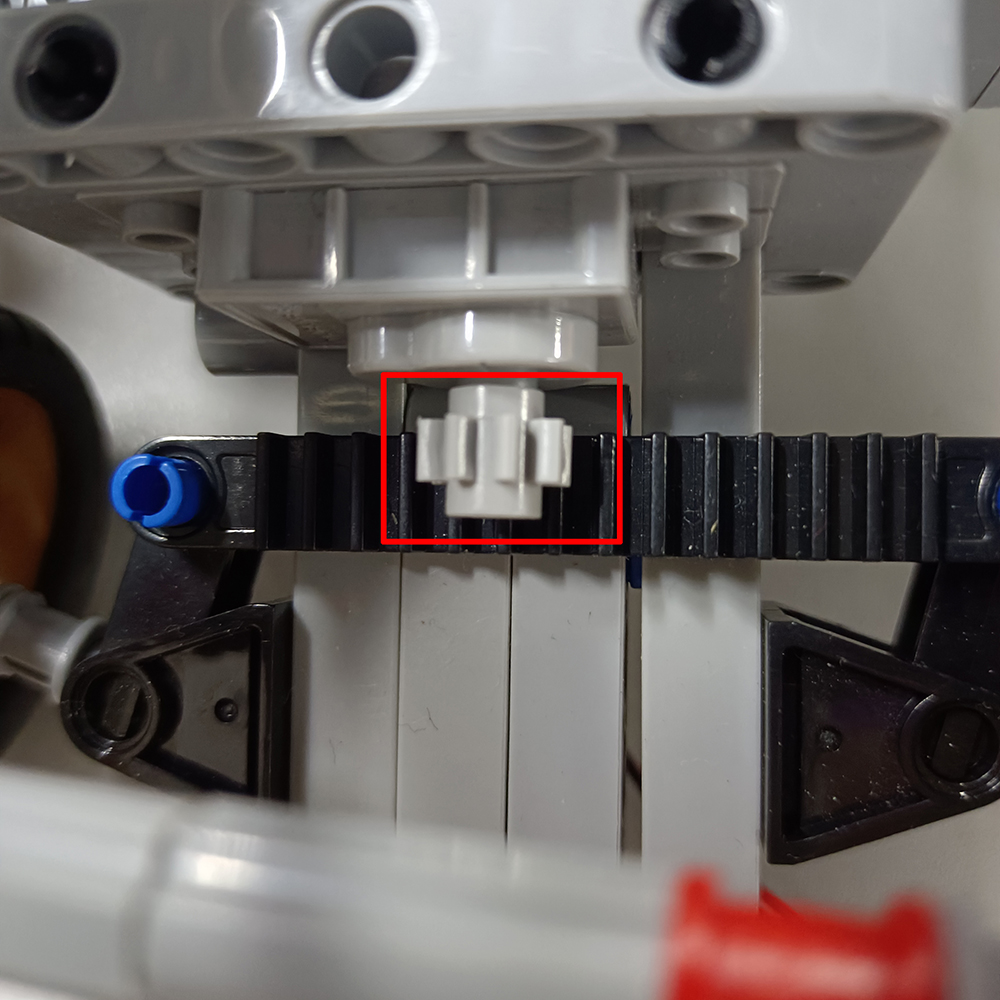
サーボアライメントを行います: もし、ステアリングサーボが前方中央を向いていない場合、2つの選択肢があります:
オプション1 ) サーボからスモールギアを取り外し、手動で前輪の向きを調整し、再びスモールギアをサーボに取り付けます。
オプション2) 以下の行のデフォルト値を変更することができます:
#define FRONT 90 // 90 degree means steering to front
ハンドルが左に寄っている場合は、90から95,100,105…に値を上げてください。
もし、ハンドルが右に傾くようなら、値を90から85,80,75に減らしてください …
ステアリングホイールが最終的に正面を向くまで、スケッチを再度実行します。
この値を使って、lesson3,4,5のスケッチコードを変更し、FRONTのデフォルト値でステアリングサーボが常に正面を向くようにします。

1.OSOYOO Basic Board for ArduinoをPCから取り外し、OSOYOO Motor Shieldの電源スイッチがオフになっていることを確認し、電池が電池ボックスに入っていることを確認する。
(注:極の方向が正しいことを確認してください。そうでなければ、デバイスを破壊し、火災の危険を引き起こす可能性があります).
2. 車を地面に置き、バッテリーボックスとOSOYOO Motor Shieldのスイッチを入れます。
注)上記のように車が動かない場合は、配線の接続、OSOYOO Motor Shieldのジャンパーキャップ、バッテリー電圧(7.2v以上であること)を確認する必要があります。
3. 左右のエンジェルを変更したい場合は、以下のコードを編集して、再度スケッチをアップロードしてください:
int RIGHT=FRONT+80;
int LEFT=FRONT-38;
4. 車の速度を変更したい場合は、スケッチの以下のコードを編集してください。 (注:最大値は255)
#define SPEED 190
#define HI_SPEED 220