ユーザーマニュアルは、以下からダウンロードできます:

このレッスンでは、モバイルを使用してロボットカーを制御し、模擬運転を行います。模擬運転なので、APPで仮想のハンドルとギアを使い、実車と同じように模擬運転することになります。
このレッスンに進む前に、レッスン2の「基本的な動き」を完了しておく必要があります。
もし、車のフレームが完成していない場合は、レッスン1を復習してください。


基本的なワイヤーの接続が完了していない場合は、レッスン2を確認してください。
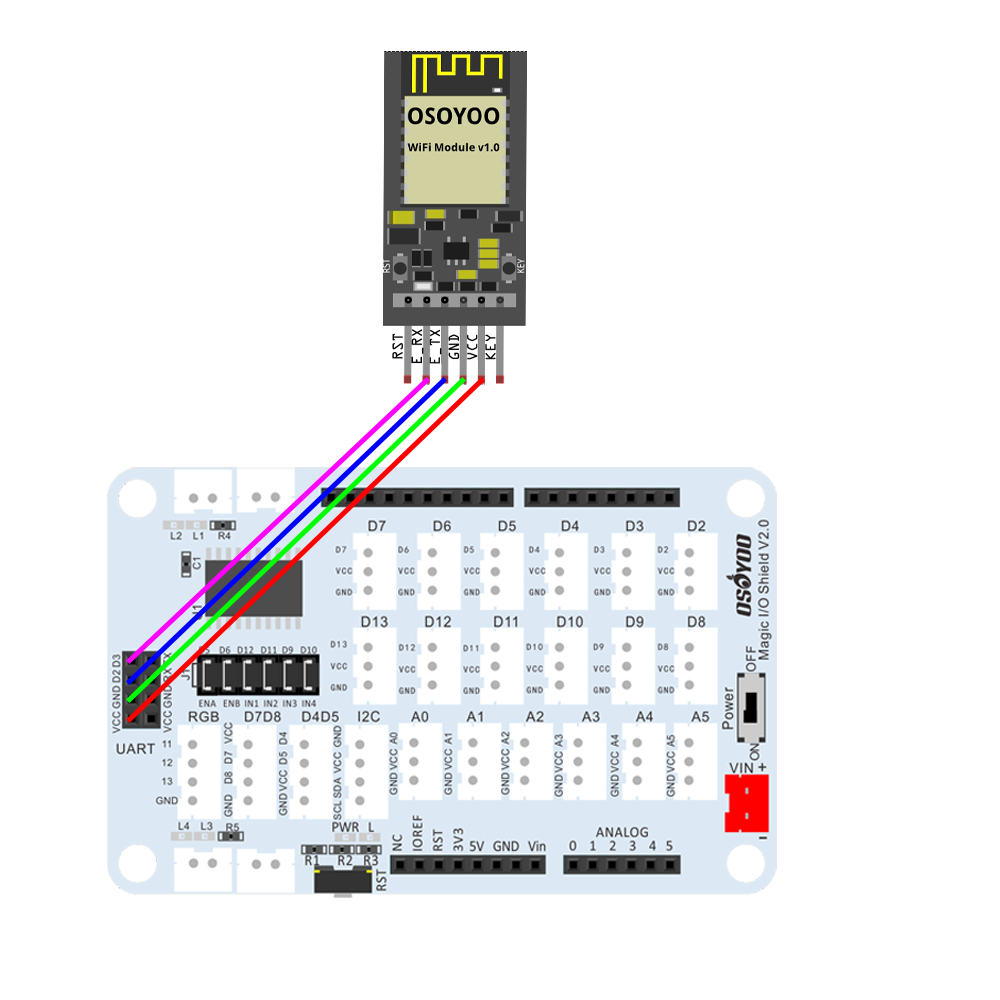
接続します:
ENB,IN3,IN4のジャンパキャップを外します。
WiFiモジュール(VCC,GND,D2,D3)をOSOYOOモーターシールドに以下のグラフのように挿入します(注意:Lesson2でインストールした既存のワイヤーを取り外さないでください):
| パート |
モーターシールド |
| IN1 ジャンパー |
D12 |
| IN2 ジャンパー |
D11 |
| ENA ジャンパー |
D5 |
| ステアサーボ |
D9 |
| バックモーターケーブル |
K1/K2 |
| 左トラッキングセンサー |
D6 |
| 右トラッキングセンサー |
D7 |
| E_TX ジャンパー |
D4 |
| E_RX ジャンパー |
D11 |

ステップ 1)
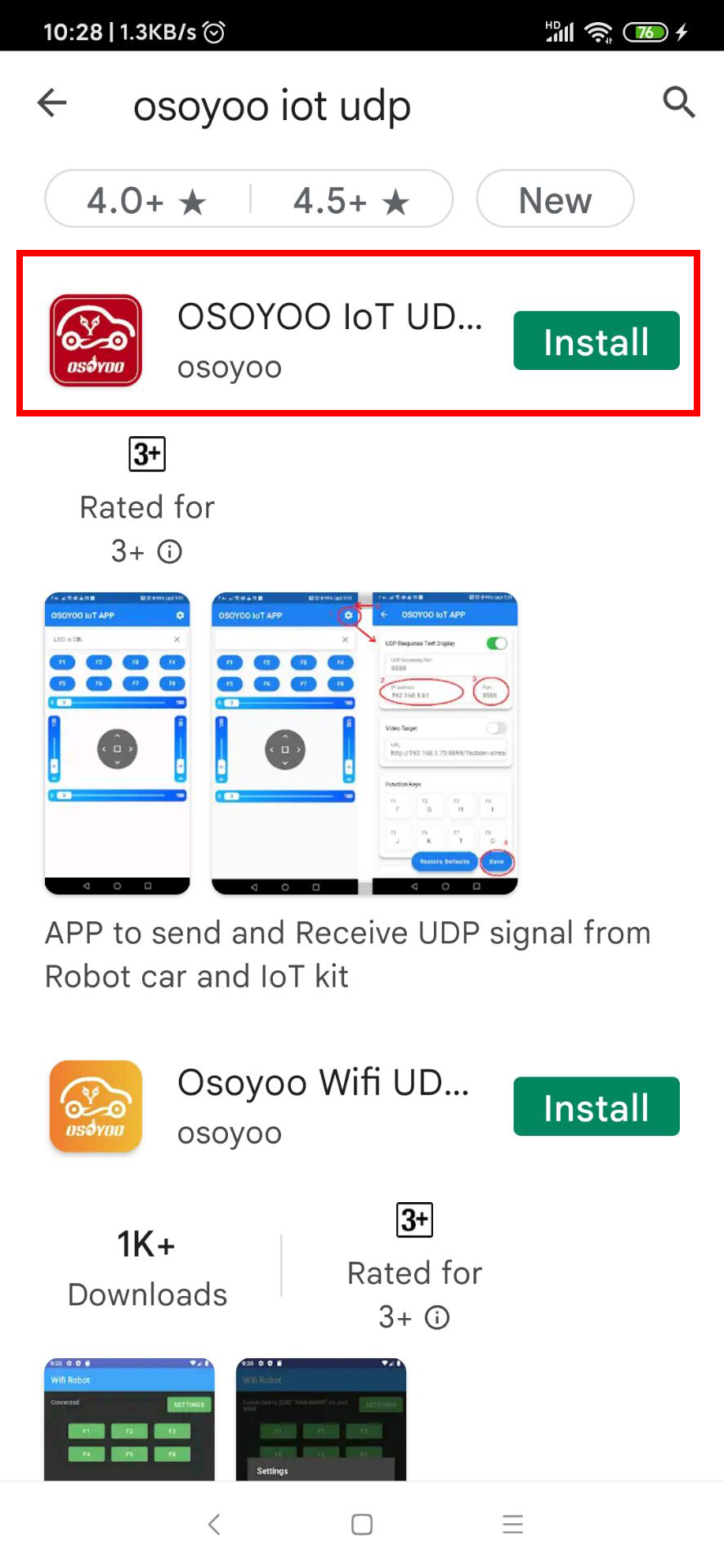
OSOYOO WIFI UDPロボットカーのコントロールAPPをダウンロードします。
Google PlayまたはApple Storeで “OSOYOO iot UDP Robot Car “のキーワードで検索すると、以下のような赤いアイコンのAPPが見つかります:
ステップ 2) あなたはレッスン2でライブラリをインストールしていない場合は、 https://osoyoo.com/driver/sg90car/PWMServo.zip からPWMServoライブラリをダウンロードしてください。
また、WifiESP-Masterライブラリのzipファイルを https://osoyoo.com/driver/WiFiEsp-master.zip からダウンロードしてください。
Arduino IDEを開き、Sketchをクリックし、Include Libraryをクリックし、Add .ZIP libraryをクリックし、OSOYOO Basic Board for Arduinoに上記の2つのZIPファイルをロードします。

ステップ 3) スケッチコードのインストール
1) https://osoyoo.com/driver/2022008400/lesson5.zip からスケッチコードをダウンロードしてください。ファイルを解凍すると、lesson5.inoというフォルダができます。Arduino IDEを開き、ファイルをクリックし、開くをクリックし、上記のフォルダの中のコードファイルlesson5.inoを選択し、OSOYOO Basic Board for Arduinoにコードをロードします。

2) 次の行で、無線LANのSSIDとパスワードを変更する必要があります。
char ssid[] = “***”; // replace *** with your router wifi SSID
char pass[] = “***”; // replace *** your wifi password
3) lesson2のStep5のオプション2のFRONTの値として、以下の行のデフォルト値90を変更してください。もし、lesson2のStep5のオプション1として、車輪の向きを手動で調整する場合は、このステップをスキップしてください。
#define FRONT 90 // steering to front
4) スケッチをOSOYOO Basic Board for Arduinoにアップロードします。最後に、Arduino IDEの右上にあるシリアルモニタウィンドウをクリックすると、以下の結果が表示されます:

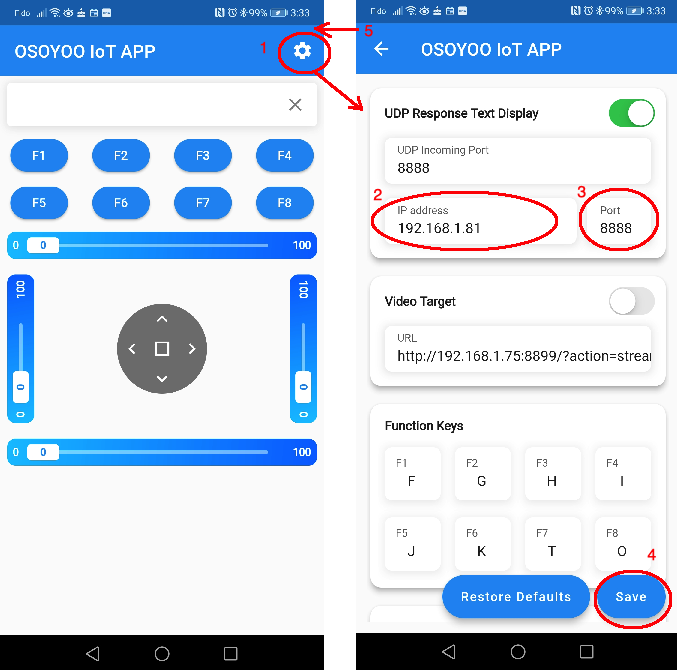
5) このモードでは、ルータから割り当てられたLANのIPアドレスが表示されます。このIPアドレスをメモして、SettingをクリックしてロボットIPアドレスを設定し、このIPアドレスをAPP Settingセクションに、Portを8888に設定してください。
これでロボットカーがLANに接続され、同じLANにある携帯電話でロボットカーを制御することができます。もしAPPがWANにある場合、ルーターコントロールパネルでポート8888をロボットカーLANのIPアドレスに転送し、ルーターIPでロボットカーを制御することができます。この機能により、ロボットカーを本物のインターネットデバイスにすることができます。

ロボットカーの電源を入れます。Settingをクリックし、ロボットのIPアドレスを設定します。
A) 携帯電話をロボットカーのLANサイドに接続し、Arduinoのシリアルモニターに表示されているロボットIPと同じIPアドレスを設定する必要があります。
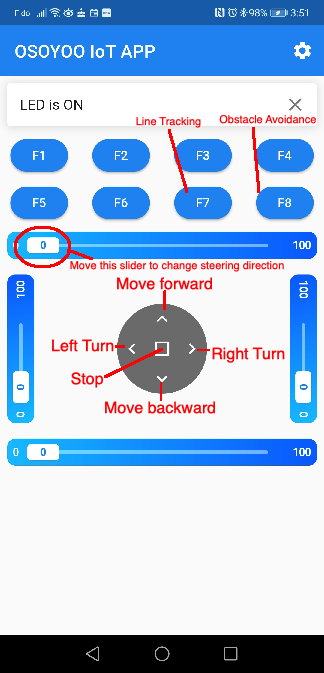
◄ボタンをクリックすると左折(ステアリングを反時計回りに回転)、►ボタンをクリックすると右折(ステアリングを時計回りに回転)することができます。
また、▲ボタンで前進、▼キーで後進となります。
F7キーを押すと、車はライントラッキングを行います。















































































Could I contoll my car with my chrome browser?
thanks