正規オンライン販売店:
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
Buy from JP |
 |
 |
 |
 |
 |
 |
 |
正規オンライン販売店:
1 概要
以前のレッスンでは、インターネットを介してOSOYOO Basic Boardにアクセスする方法をWebブラウザーで示しました。これらの例では、HTTPと呼ばれるプロトコルを使用しました。
このレッスンでは、電子メールサービスや制御信号に一般的に使用される非常にシンプルで強力なプロトコルであるUDPを使用する方法を教えます。私たちは、携帯電話のアプリを使用して、リモートメインボードに角度制御信号を送信し、サーボを特定の角度で回転させるようにします。
2 部品と装置
| 部品 |
数量 |
| OSOYOO Basic Board |
1 |
| Ethernet Shield W5100 |
1 |
| USB ケーブル |
1 |
| Servo motor SG90 |
1 |
| ジャンパーワイヤー |
数本 |
| ブレッドボード |
1 |
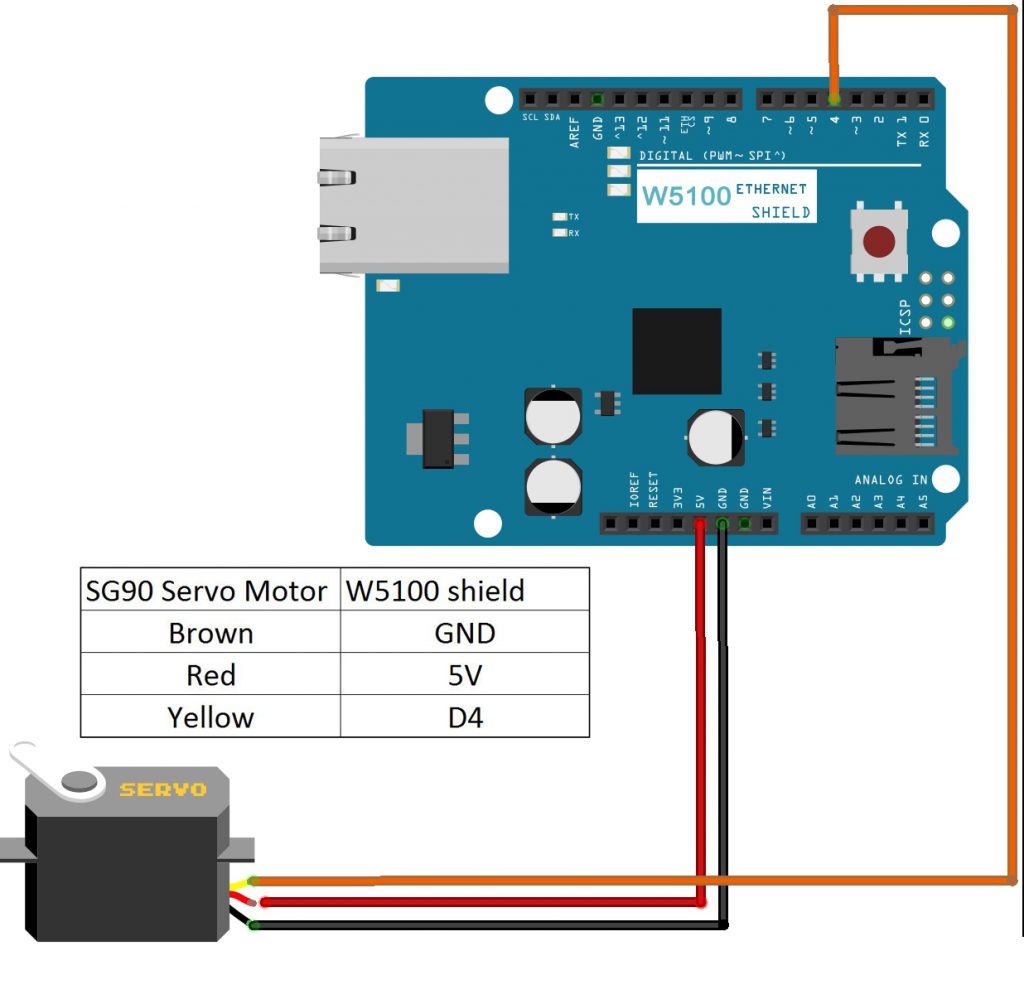
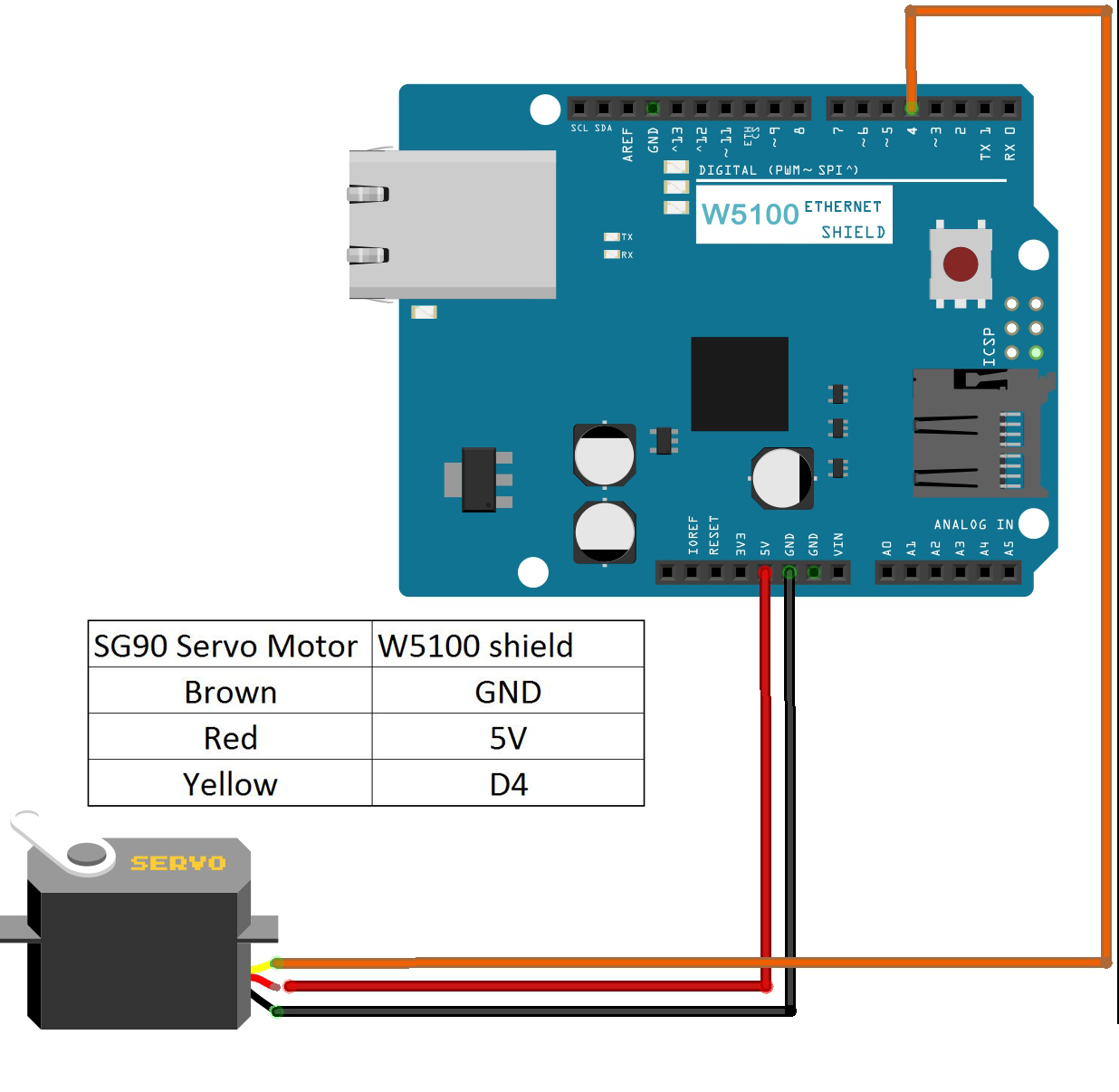
3 ハードウェア回路図
以下の図に従って、サーボモーターSG90をOSOYOO Basic Boardに接続します。
4)ソフトウェアのインストール
Step A)サーボライブラリのインストール:(すでにサーボライブラリをインストールした場合は、この手順をスキップしてください)
ライブラリをダウンロードします:
https://osoyoo.com/driver/Servo.zip
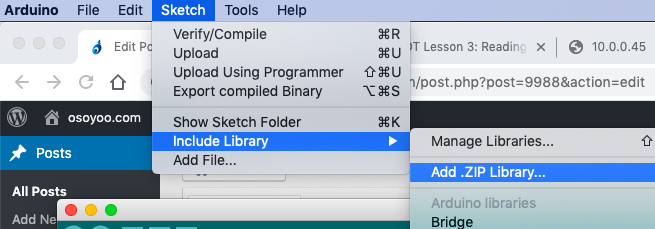
次に、IDE->スケッチ->ライブラリをインクルード->.ZIPライブラリを追加を選択し、ダウンロードしたこれらの2つのzipファイルをアップロードします。
Step B) https://osoyoo.com/driver/ethernet_iot/lesson7/w5100-lesson7.zipからサンプルコードをダウンロードし、ファイルを解凍してw5100-lesson5.inoファイルをダブルクリックして、スケッチをIDEにロードします。
シリアルモニターを開くと、ルーターがメインボードにIPアドレスを割り当てることができることがわかります。
上記の結果では、私のメインボードのIPアドレスが10.0.0.45であることがわかります。これをUDP送信/受信携帯電話アプリに設定します。
Step C)AndroidまたはiOSのUDP送受信アプリをダウンロードします。どのUDP送受信アプリでも使用できます。このレッスンでは、Google Playストアの無料の「UDP Sender/receiver」というアプリを使用します。iPhoneを使用している場合は、同様のアプリを取得するためにUPD senderを検索できます。
UDP Sender/Receiverアプリを開いた後、以下のUIに従います:
ローカルポートは1から10000の間の任意の値にできますが、空白にはできません。私たちのサンプルと同じ2391を使用することをお勧めします。
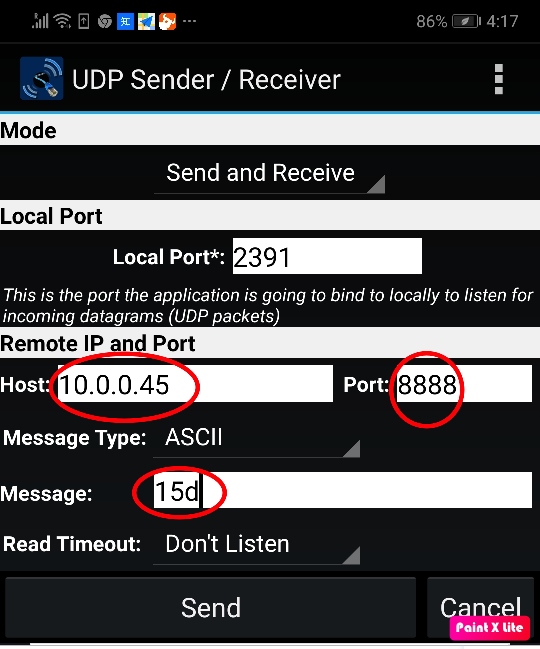
上記のUIでは、3つのフィールドを記入します:
ホスト:10.0.0.45、これはIDEシリアルモニターから取得したメインボードIPです。
ポート:8888、これはレッスン7のスケッチの24行目で定義されたUDPリッスンポートです。
メッセージ:15d、これはサーボを15度の位置にしたいことを意味する制御メッセージです。
テスト:
今、送信ボタンをクリックすると、メッセージ「15d」がリモートメインボードに送信され、サーバーが15度回転します。
メッセージテキストフィールドに「180D」と入力して送信ボタンをクリックすると、サーボが180度の位置に回転します。
メッセージ「0D」を送信すると、サーボは0度の位置に戻ります。















May 17, 2018
The servo does not move.
Transfer and dashboard settings are normal.
we have updated our on-line instruction of lesson 7. could you please have a try again?
we have updated our on-line instruction of lesson 7. could you please have a try again?
Servo does’nt move. In the UDP send receive app (same as in your instructions) local port info (2391 in your example) is empty. When fill up with any value the msg text seems to be sent but nothing happen
You need set local port by yourself. It can any value between 1 to 10000, can not be blank. If you like, you can use 2391 same as our example.
Hi,
Not Working.
Any tips?
thanks,
M