Wir haben in Lektion 3 das Konzept der ADC-Analogeingabe und der PWM-Analogausgabe gelernt. Dieses Mal verwenden wir einige neue Analogeingabegeräte und PWM-Ausgabegeräte.
In dieser Lektion zeigen wir Ihnen, wie Sie ein analoges Signal von einem Potentiometer (einstellbarer Widerstand) über einen Pico ADC-Pin (GP28) lesen können. Wir werden auch einen Servomotor an GP16 anschließen, der ein PWM-Signal erzeugen kann. Der Servo dreht seinen Arm, wenn Sie am Potentiometer drehen.
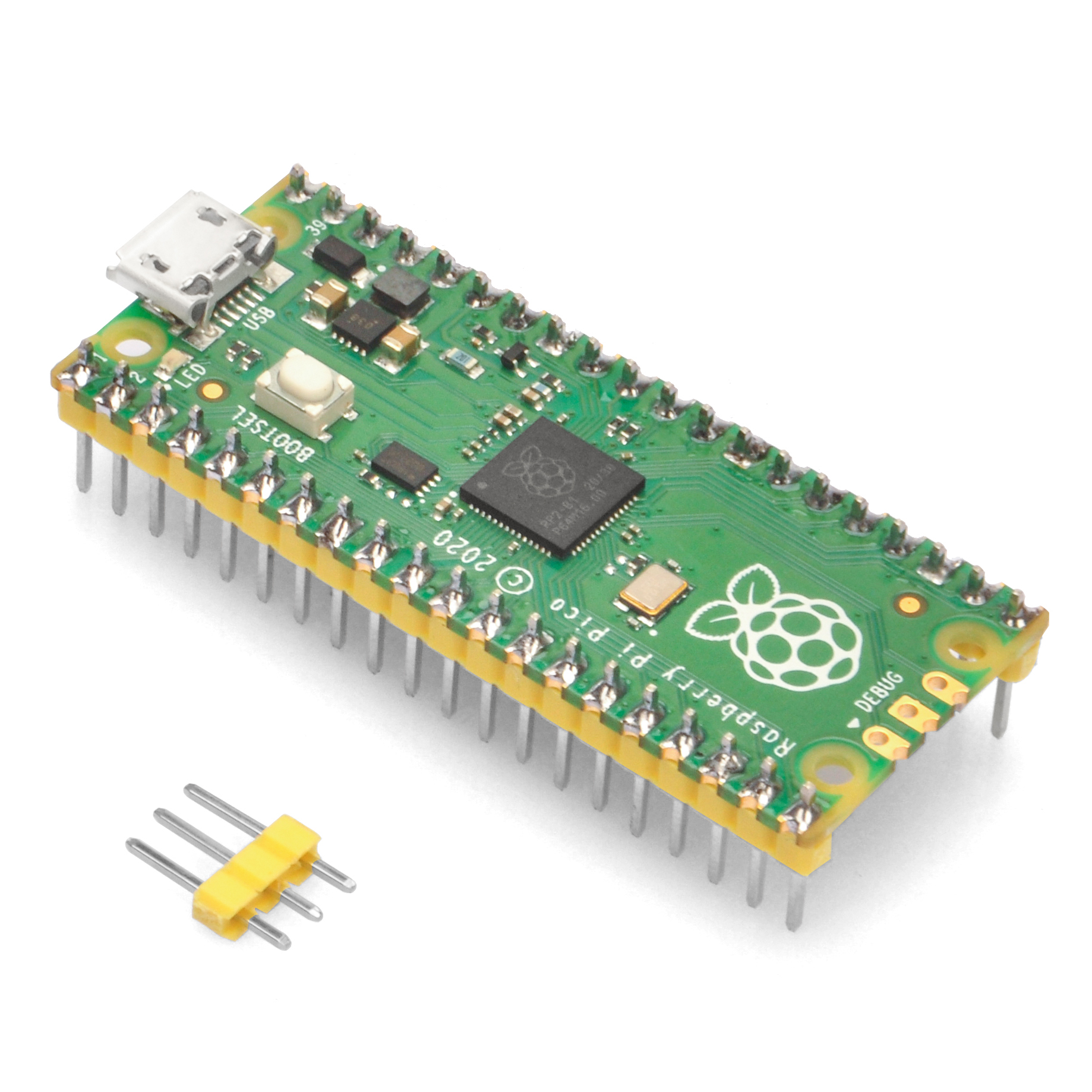
Raspberry Pi Pico Board und MicroUSB-Kabel
Ein Computer zum Ausführen der Thonny Python-IDE
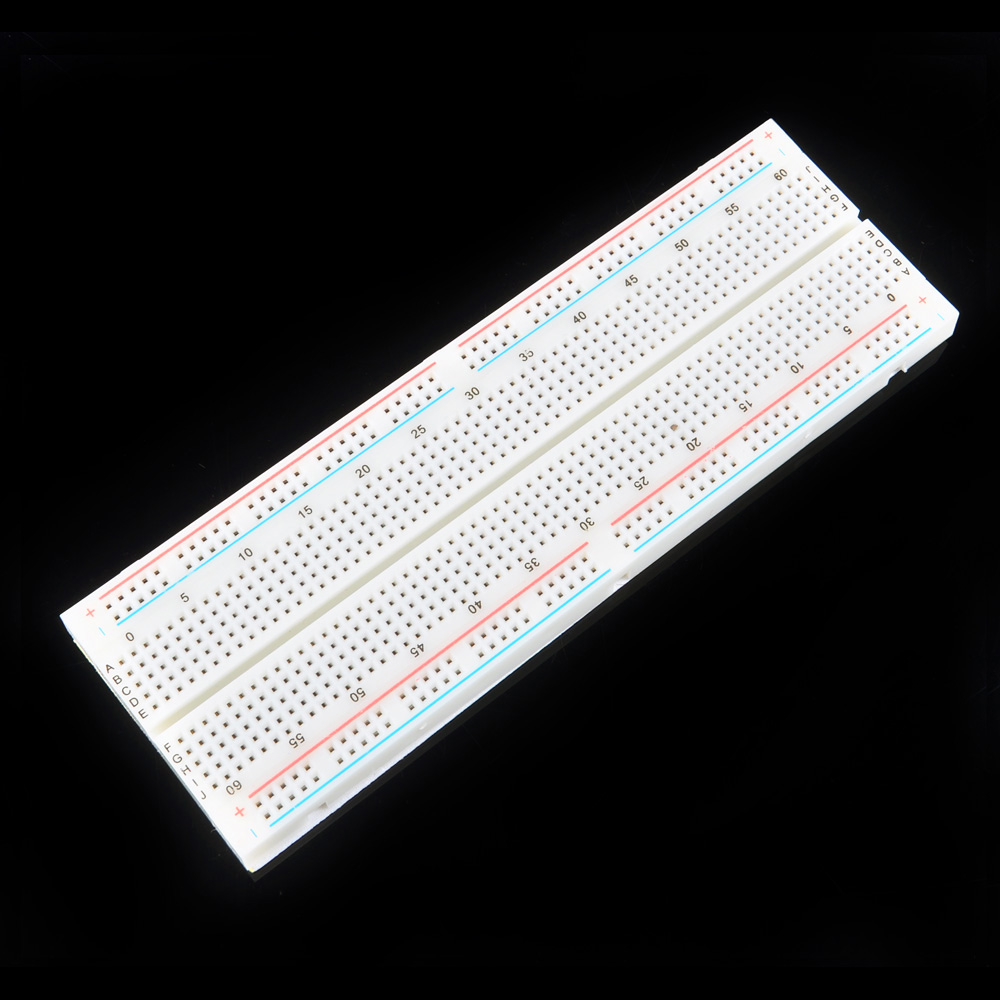
Breadboard x 1
Potentiometer x 1
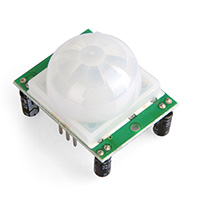
Servomotor x 1
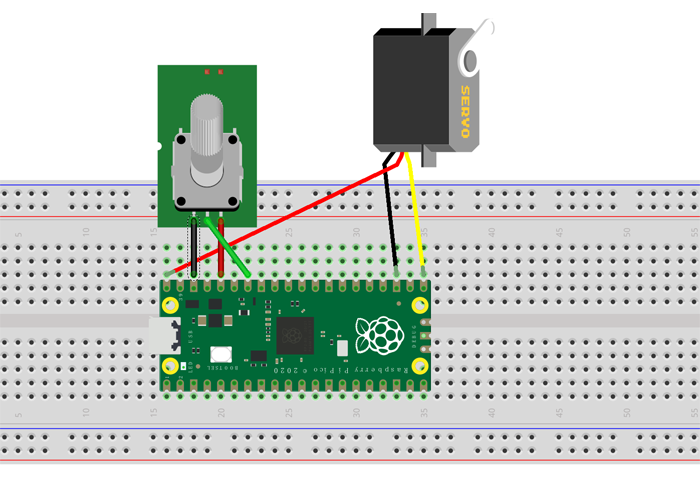
Im obigen Schaltbild können Sie sehen, dass:
Der rote Draht des Servos an den Pico Vbus-Pin (5V) angeschlossen ist.
Der braune Draht des Servos an Pico GND angeschlossen ist.
Der gelbe Draht des Servos an den Pico PWM-Pin (GP16) angeschlossen ist.
Der GND des Potentiometers an Pico GND angeschlossen ist.
Das VCC des Potentiometers an Pico 3,3V angeschlossen ist.
Der mittlere Pin des Potentiometers an den Pico ADC-Pin (GP28) angeschlossen ist.
Sie können Thonny verwenden, um pico-lesson5.py zu öffnen und später auf Pico zu laden.
Hier ist der vollständige Code mit Kommentaren:
from machine import Pin, PWM,ADC #import libraries for Pin, PWM, ADC
from time import sleep
adc = ADC(Pin(28)) #set Potentiometer analog input from GP28 pin
servoPin = PWM(Pin(16)) #set servo pwm output to GP16 pin
servoPin.freq(50) #set servo frequency 50
def servo(degrees): #rotate servo arm to degrees position
# limit degrees beteen 0 and 180
if degrees > 180: degrees=180
if degrees < 0: degrees=0
# set max and min duty
maxDuty=9000
minDuty=1000
# new duty is between min and max duty in proportion to its value
newDuty=minDuty+(maxDuty-minDuty)*(degrees/180)
# servo PWM value is set
servoPin.duty_u16(int(newDuty))
while True:
value=adc.read_u16() #read Potentiometer value
print(value)
degree=value*180/65500 #convert Potentiometer value to a servo position angle
servo(degree). #rotate servo to that angle
sleep(0.001)
Schritt 1: Verbinden Sie das Pico-Board mit einem der USB-Anschlüsse an Ihrem PC.
Schritt 2: Wenn Sie Thonny-Software noch nicht installiert haben oder nicht wissen, wie man die Thonny-IDE benutzt, lesen Sie bitte Lektion 1.
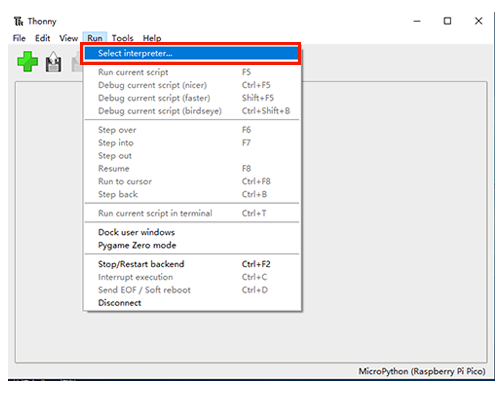
Schritt 3: Öffnen Sie jetzt die Thonny Python-IDE, klicken Sie auf “Run”, um MicroPython für Raspberry Pi Pico als Interpreter auszuwählen.
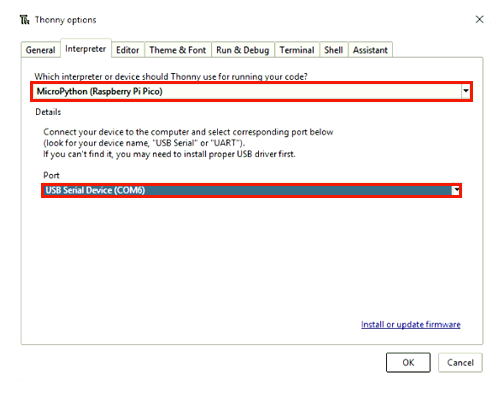
Wählen Sie auch den COM-Port aus, an den Ihr Pico-Board angeschlossen ist.:
Klicken Sie dann auf OK, um die Einstellungen zu speichern.
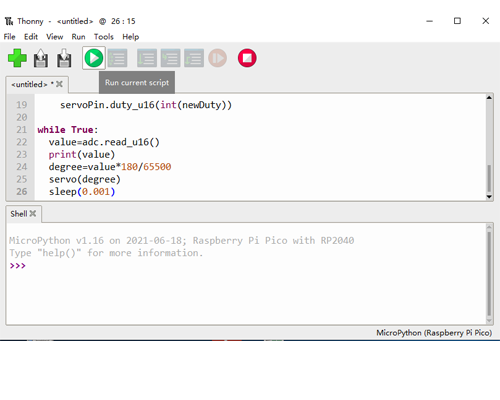
Schritt 4: Kopieren Sie jetzt den Python-Code in das Thonny-Fenster wie folgt:
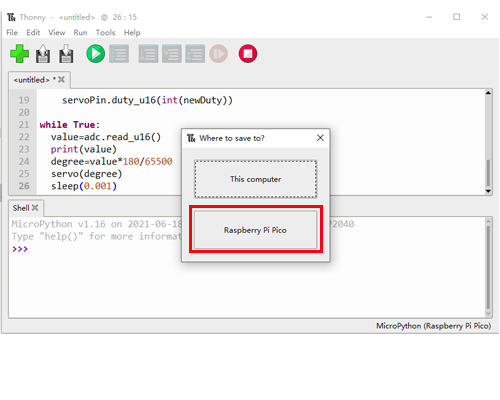
Schritt 5: Klicken Sie auf den kleinen ►-Button und das Speicherdialogfeld wird wie in folgendem Foto angezeigt.Wählen Sie Raspberry Pi Pico als Ziel aus.
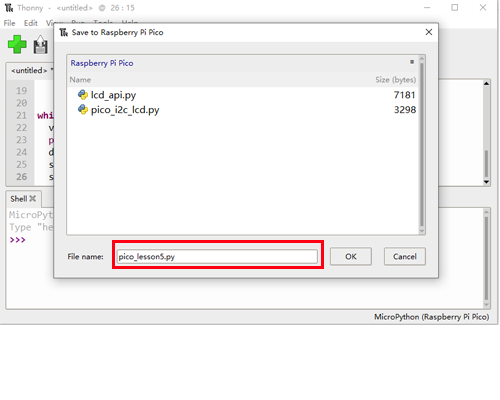
Schritt 6: Benennen Sie die Datei als pico-lesson5.py und klicken Sie dann auf OK.
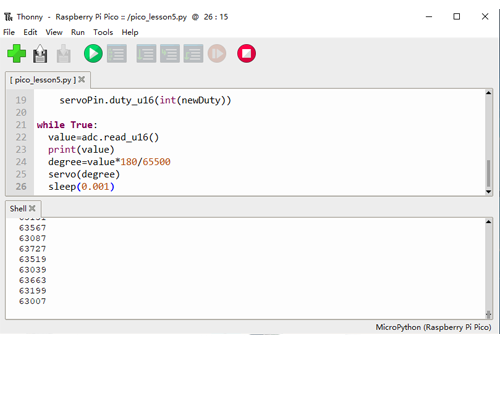
Schritt 7: Klicken Sie erneut auf den kleinen ►-Button, um den Python-Code auszuführen.
etzt können Sie das Potentiometer drehen, und Sie werden sehen, dass der Servoarm entsprechend rotiert.
Nach Abschluss des Vorgangs drücken Sie Strg+C, um den Befehl zu beenden.