In dieser Lektion werden wir ein Projekt zur Hindernisvermeidung mit autonomen Fahren durchführen. Wir verwenden ein Ultraschallmodul, um das Hindernis “zu sehen”, und das Auto wird automatisch von dem Hindernis abbiegen.
Bevor Sie mit dieser Lektion fortfahren, müssen Sie Lektion 1 abschließen.
1) Installieren Sie das Ultraschallmodul mit 4 Stück M1,5*8 Schrauben und M1,5 Muttern an der Montagehalterung.
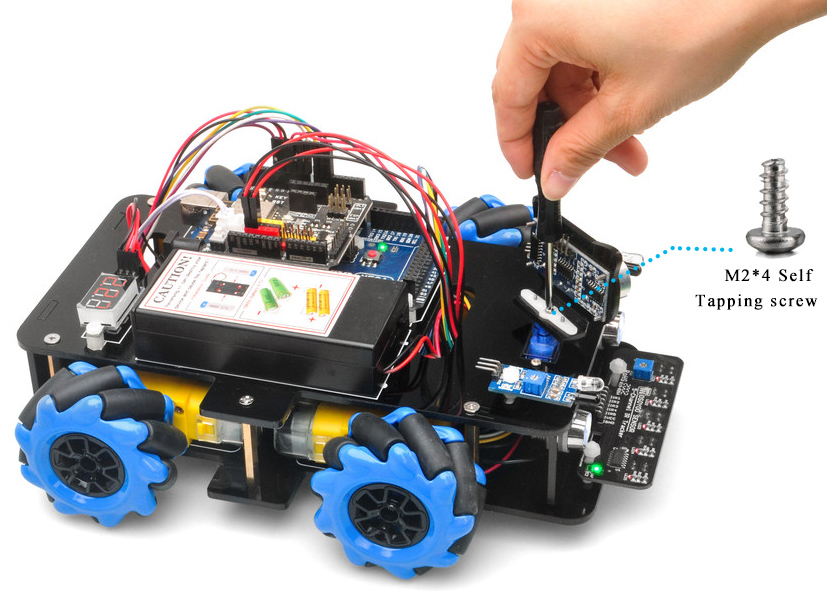
2)Installieren Sie die Montagehalterung für das Ultraschallmodul mit M2*4 selbstschneidenden Schrauben auf dem Servomotor.
Beim Platzieren des Ultraschalls von unten sollten Sie darauf achten, dass sich die selbstschneidenden Schrauben leicht streifen.
A. Stützen Sie den Motor von unten ab, da sich die selbstschneidenden Schrauben leicht streifen können.
B. Setzen Sie die Schraube erst nach dem Ausrichtungsprozess ein.
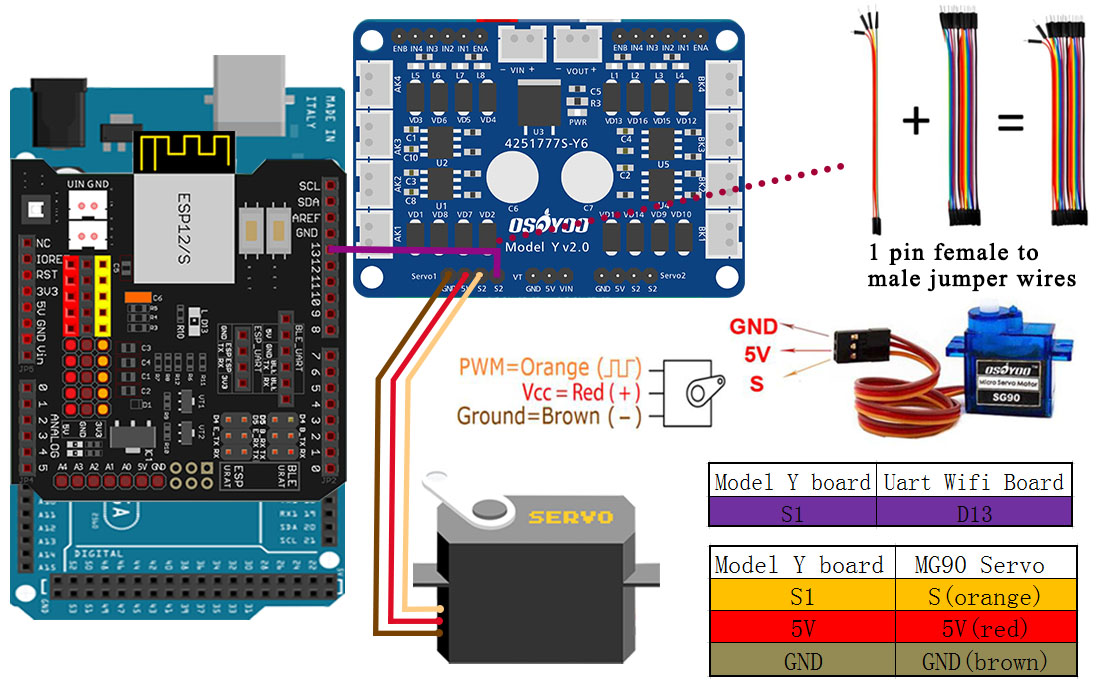
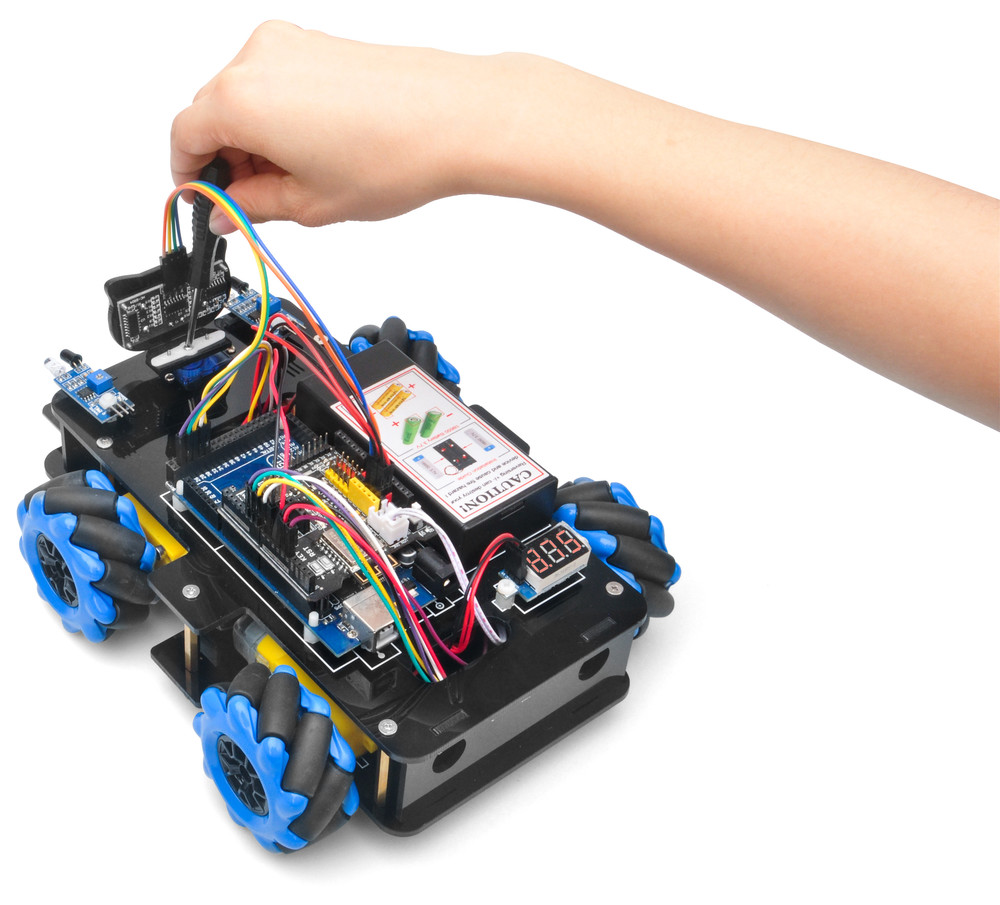
3)Bitte behalten Sie alle Verbindungen aus Lektion 1 unverändert. Bevor Sie die Kabel verbinden, stellen Sie sicher, dass Sie den SG90 Servomotor wie folgt mit dem Model Y Board und dem OSOYOO Uart Wi-Fi Shield verbunden haben.
Hinweis: Sie müssen 1 Stück männlich-weibliches Jumperkabel aus unserem 10-teiligen Jumperkabel-Set abtrennen. Eine beliebige Farbe aus dem Set ist in Ordnung. Die restlichen Kabel dienen als Ersatzteile für potenziell beschädigte oder defekte Kabel
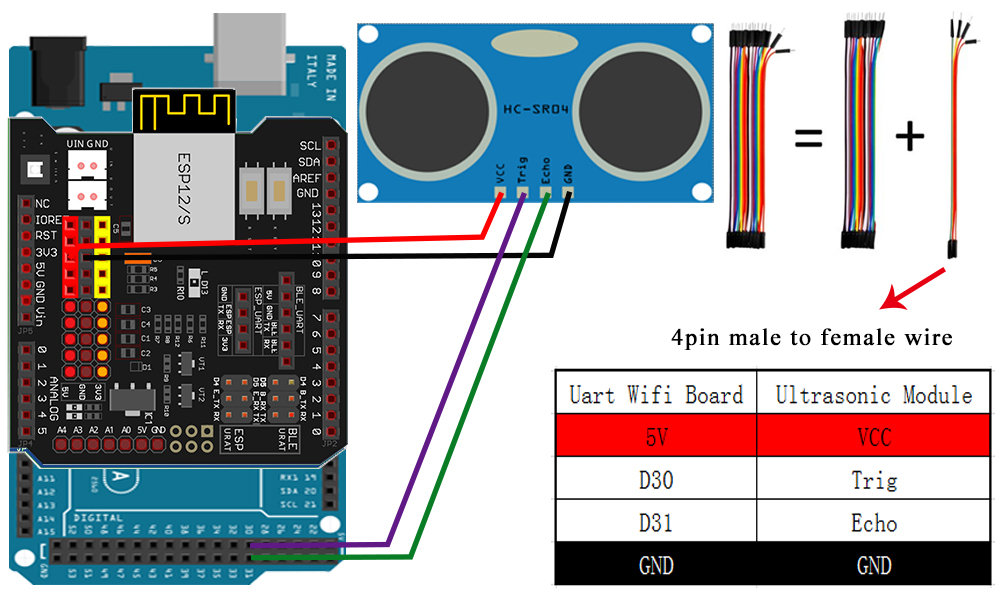
4)Verbinden Sie das Ultraschallmodul wie folgt mit dem OSOYOO Uart Wi-Fi Shield:
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie bereits eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie diesen Schritt bitte). Laden Sie die Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en, herunter und installieren Sie die Software.
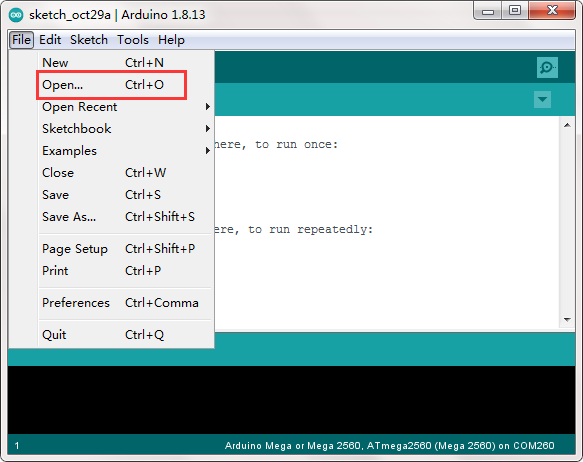
Schritt 3: Verbinden Sie das Mega2560-Board über das USB-Kabel mit dem PC. Öffnen Sie die Arduino IDE → klicken Sie auf “Datei” → klicken Sie auf “Öffnen” → wählen Sie den Code “lesson2.ino” im Ordner “lesson1” aus. Laden Sie den Code in den Arduino.
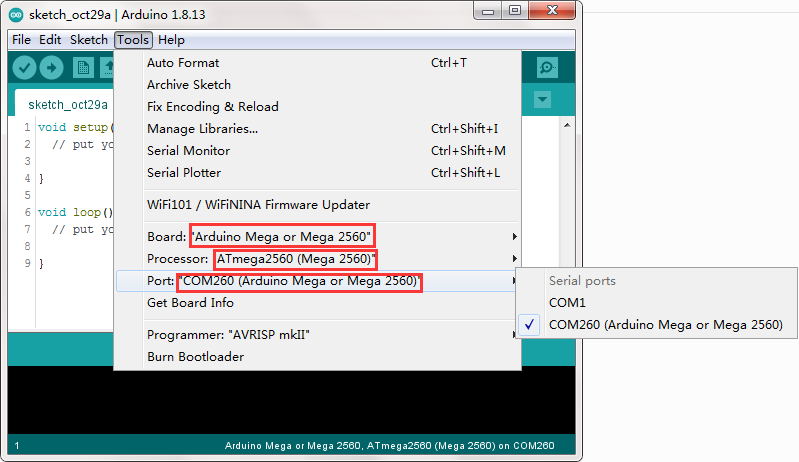
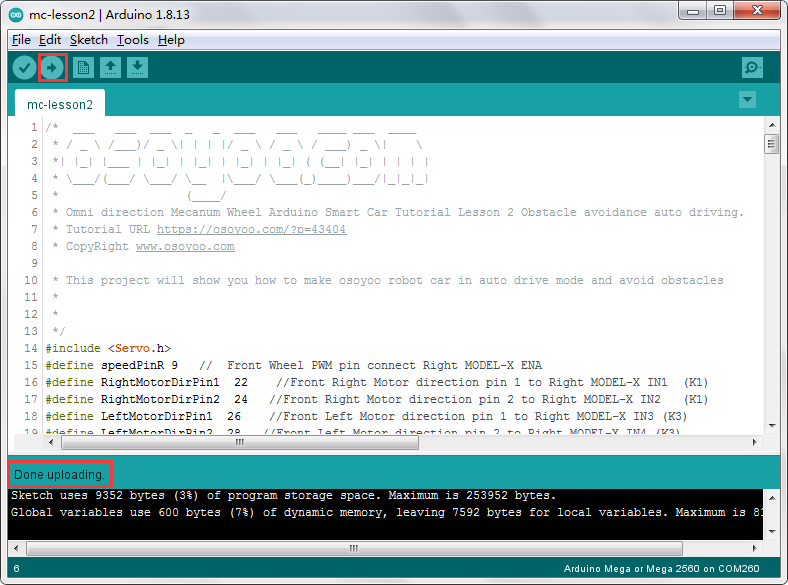
Schritt 4: Wählen Sie das MEGA2560-Board als Board-Typ und den richtigen Port für Ihr Projekt gemäß dem folgenden Bild aus. Laden Sie das Sketch auf das Board hoch.
Ausrichtung der Anfangsrichtung des Ultraschallsensorservos
Nach dem Einschalten der Batterie führt der Servo einige Bewegungen aus und bleibt schließlich für 3 Sekunden in der vorderen Richtung stehen.
Wenn der Ultraschallsensor während dieser ersten 3 Sekunden nicht nach vorne ausgerichtet ist, sollten Sie die Batterie sofort ausschalten, den Sensor vom Servo entfernen, ihn erneut installieren und sicherstellen, dass er gerade nach vorne zeigt, wie auf dem Bild dargestellt. Andernfalls funktioniert das Hindernisvermeidungsprogramm nicht ordnungsgemäß.
Nachdem Sie die Richtung des Sensors angepasst haben, schalten Sie die Batterie erneut ein. Der Sensor sollte nach vorne ausgerichtet sein, wie auf dem Bild gezeigt. Wenn seine Richtung nicht geradeaus ist, schalten Sie die Batterie aus und führen Sie erneut eine Richtungsausrichtung durch
.
Endgültiger Test :
Nach dem Einschalten des Batterieschalters am Batteriekasten, wenn sich das Ultraschallmodul in die vordere Position dreht, bedeutet dies, dass Sie die Position des Sensors nicht mehr anpassen müssen. Warten Sie einfach 3 Sekunden. Wenn kein Hindernis erkannt wird, fährt das Auto geradeaus. Wenn ein Hindernis erkannt wird, bleibt das Auto stehen und das Ultraschallmodul dreht sich von rechts nach links, um die umgebenden Hindernisse zu erfassen. Das Roboter-Auto entscheidet dann je nach Hindernissensordaten und unserem Hindernisvermeidungsalgorithmus, ob es nach links abbiegen, nach rechts abbiegen oder rückwärts fahren soll.
Manchmal kann es vorkommen, dass Ihr Auto kollidiert und die Position Ihres Ultraschallsensors sich ändert. Denken Sie daran, die Ausrichtung der Sensorrichtung erneut vorzunehmen, wie im Link “Ultraschallsensor Servo-Initialrichtungsausrichtung” beschrieben.
Fehlerbehebung
Manchmal kann es vorkommen, dass sich das Auto bei der Ausführung des Sketch-Codes von Lektion 2 rückwärts bewegt, obwohl kein Hindernis vorhanden ist. Dies bedeutet normalerweise, dass es ein Problem mit der Installation des Ultraschallsensors oder der Verbindung der Kabel gibt. Um das Problem zu lösen, überprüfen Sie bitte Schritt 4 der Hardwareinstallation.
Verwenden Sie 4 neue Jumperkabel, um den Sensor mit dem Arduino Wi-Fi-Board zu verbinden, stellen Sie sicher, dass:
Der VCC des Ultraschallsensors wird mit 5V des Wi-Fi-Boards verbunden.
Der TRIG des Ultraschallsensors wird mit D30 des Wi-Fi-Boards verbunden.
Der ECHO des Ultraschallsensors wird mit D31 des Wi-Fi-Boards verbunden.
Der GND des Ultraschallsensors wird mit GND des Wi-Fi-Boards verbunden.
Nachdem die Sensorleitungen gemäß obiger Anleitung ordnungsgemäß verbunden sind, können Sie einen Test des Sensors durchführen. Laden Sie bitte den Testcode für den Entfernungssensor von https://osoyoo.com/download/code/distance.zip, herunter, stellen Sie sicher, dass Ihr Arduino und Ihr PC mit dem blauen Kabel verbunden sind, und führen Sie dann den Code distance.ino aus. Öffnen Sie nun den Seriellen Monitor in Ihrer Arduino IDE und halten Sie Ihre Hand vor den Sensor.
Sie sollten einen Entfernungs-Wert im Seriellen Monitor sehen. Dieser Wert entspricht der Entfernung zwischen Ihrer Hand und dem Sensor.
Wenn Sie nur den Wert 0 im Seriellen Monitor sehen, bedeutet dies, dass Ihre Sensor-Kabelverbindung falsch ist, das Kabel möglicherweise defekt ist oder der Sensor defekt ist. Sie müssen möglicherweise 4 neue Kabel austauschen oder sich an den OSOYOO-support wenden, um den Sensor zu ersetzen.













Thank You!