In dieser Lektion werden wir eine mobile App verwenden, um unser Roboterauto zu steuern und eine Imitationsfahrt durchzuführen. Da es sich um eine simulierte Fahrt handelt, werden wir in unserer App ein virtuelles Lenkrad und einen virtuellen Gang verwenden, um ihre Entsprechungen im echten Auto zu imitieren.
OSOYOO Mecanum-Rad-Roboterfahrwerk x1
OSOYOO Räder und Motoren x4 (linke Räder x2 / rechte Räder x2)
OSOYOO Mega2560 Board, vollständig kompatibel mit Arduino UNO/Mega2560 x1
OSOYOO Uart Wi-Fi Shield x1
OSOYOO Modell Y Treiberplatine x1
OSOYOO Spannungsmesser x1
OSOYOO Bluetooth-Module x1
OSOYOO Batteriekasten x1
OSOYOO 3-poliges weibliches zu weibliches Jumper-Kabel x1
OSOYOO 6-poliges männliches zu weibliches Jumper-Kabel x2
OSOYOO 10-poliges männliches zu weibliches Jumper-Kabel x1
OSOYOO 2-poliges XH.25 weibliches zu weibliches Kabel x1
18650 Batterien (3,7V) x2
Batterieladegerät x1
Schritt 1: Du musst Lektion 1 (das Zusammenbauen des Autos) abschließen, bevor du mit dieser Lektion fortfährst.
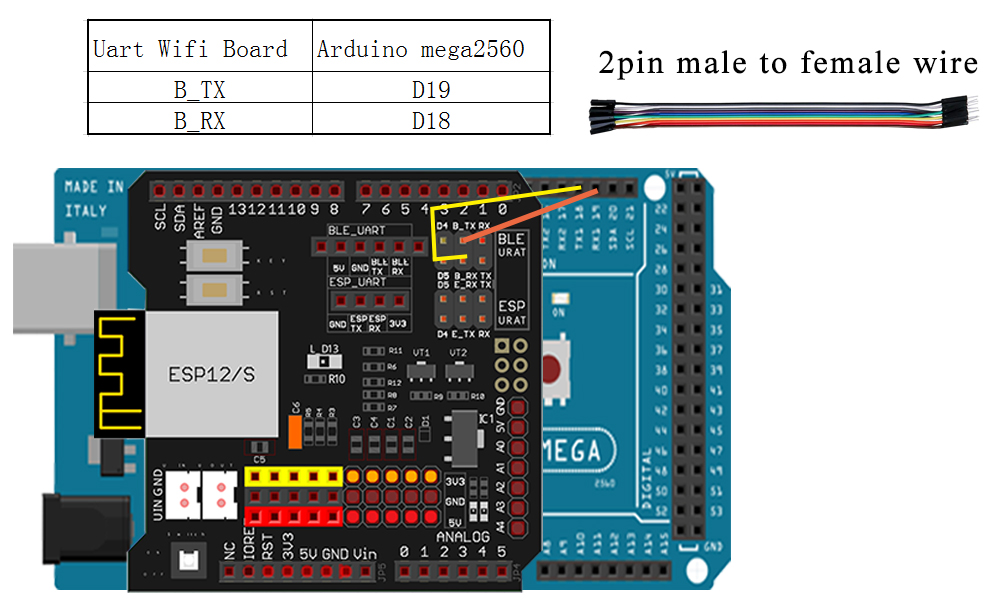
Schritt 2: Verbinde die Bluetooth TX/RX-Ports mit D19 und D18 mit Jumper-Kabeln. (Hinweis: Du musst 2 Stück männlich-weibliche Jumper-Kabel aus unserem 10er-Paket verwenden. Die Farbe der Kabel aus dem Paket spielt keine Rolle. Die restlichen 8 Kabel dienen als Ersatzteile für potenziell gebrochene oder beschädigte Kabel.)
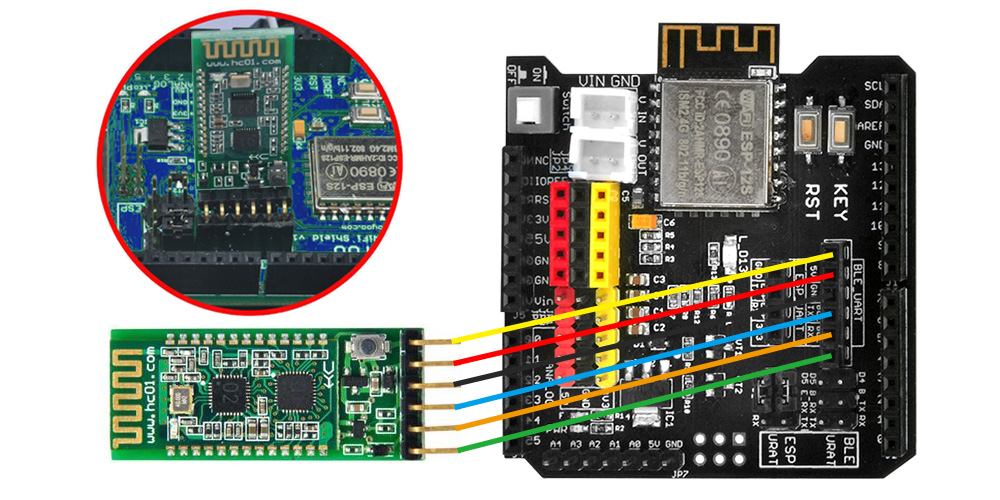
Schritt 3: Das Bluetooth-Modul sollte in den 6-poligen Bluetooth-Steckplatz auf dem OSOYOO Wi-Fi Board eingesteckt werden.
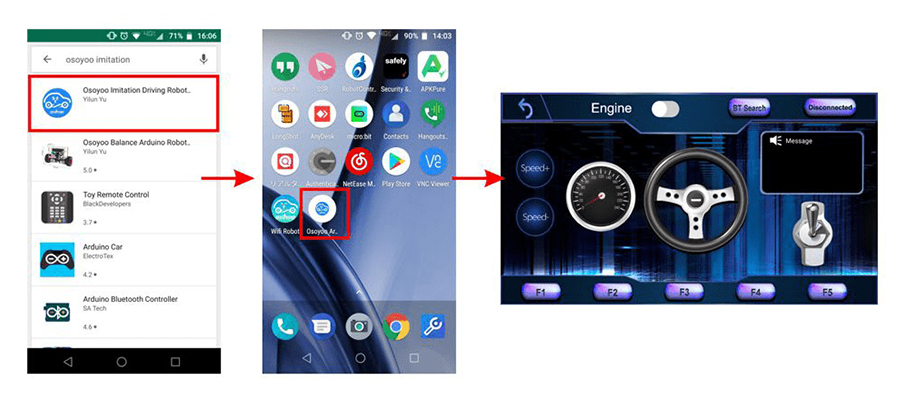
Schritt 4: Mobile App:
Gehe zum Google Play Store oder Apple App Store und suche nach der App mit dem Namen “OSOYOO Imitationsfahrt”. Lade die App herunter und installiere sie anschließend auf deinem Smartphone.
Verbinde das HC-02 Bluetooth mit einem Android-Telefon. In der Android-App gibt es eine Schaltfläche namens “BT-Suche”. Wenn du auf diese Schaltfläche klickst, wird eine Liste der Bluetooth-Geräte angezeigt, die mit deiner App gekoppelt wurden. Wähle das HC-02-Gerät aus, um das Auto zu verbinden. Sobald HC-02 verbunden ist, ändert sich der Bluetooth-Status von “Getrennt” zu “Verbunden”. Du kannst das Auto nur steuern, wenn die Bluetooth-Verbindung hergestellt ist.
Verbinde das HC-02 Bluetooth mit einem iPhone/iPad, Klicke einfach auf die Schaltfläche “Verbinden”. Ein HC-02-Gerät wird in einer Popup-Liste angezeigt. Klicke auf dieses HC-02-Gerät, um das Bluetooth-Modul mit deinem iPhone zu verbinden. Dann ändert sich der Name der Schaltfläche von “Verbinden” zu “Trennen”.
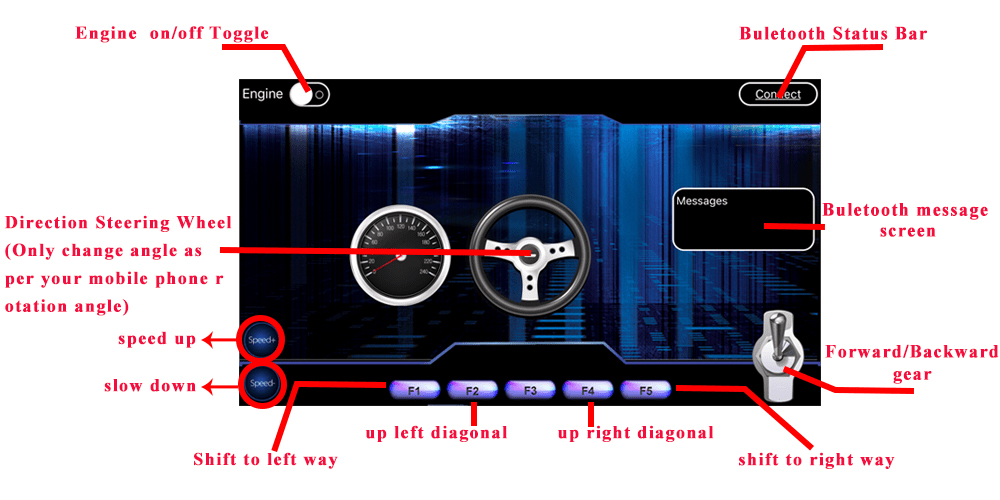
Motorschalter : Wenn der Motorschalter auf AUS (weiß) eingestellt ist, bleibt das Auto stehen und alle Schaltflächen in der App sind deaktiviert. Wenn der Motorschalter auf EIN (rot) eingestellt ist, beginnt das Auto zu fahren. Alle anderen Bewegungssteuerungsschaltflächen werden aktiviert.
Vorwärts-/Rückwärtsgangschalter: Dieser Gangschalter kann das Auto vorwärts oder rückwärts fahren lassen, ähnlich wie bei einem echten Autogangschalter.
Benutzerdefinierte Tasten F1, F2, F3, F4, F5: In dieser Lektion verwenden wir nur die Taste F3, die die Bewegung des Autos pausiert. Der Unterschied zwischen F3 und dem Motorschalter-AUS besteht darin, dass beim Berühren des Motorschalters alle anderen Schaltflächen deaktiviert werden. Du musst den Motorschalter erneut umschalten, um andere Schaltflächen zu aktivieren. Wenn jedoch F3 gedrückt wird, bleibt das Auto stehen, aber alle anderen Schaltflächen sind weiterhin aktiv. Drücke F1, um nach links zu wechseln, F2 für eine diagonale Bewegung nach oben links, F3 zum Pausieren, F4 für eine diagonale Bewegung nach oben rechts und F5, um nach rechts zu wechseln.
Lenkradrichtung: Wenn du das Handy drehst, ändert sich der Lenkradwinkel entsprechend der Drehung des Handys. Dadurch ändert das Auto seine Richtung. Zum Beispiel bewegt sich das Auto nach links, wenn das Lenkrad im Uhrzeigersinn gedreht wird. Denke daran, dass das Lenkrad und der Vorwärts-/Rückwärtsgang zusammenarbeiten sollten, so wie du ein echtes Auto fährst. Wenn du zum Beispiel dein Auto rückwärts in einen rechtsseitigen Parkplatz stellen möchtest, musst du den Gang auf die R-Position stellen und das Lenkrad gegen den Uhrzeigersinn drehen.
Geschwindigkeit+: Erhöht die Geschwindigkeit des Roboterauto
Geschwindigkeit-: Verringert die Geschwindigkeit des Roboterautos
Schritt 1: Installiere die neueste Arduino IDE (Wenn du bereits die Version 1.1.16 oder höher der Arduino IDE hast, überspringe diesen Schritt bitte). Lade die Arduino IDE von [Download-Link] herunter https://www.arduino.cc/en/Main/Software?setlang=en, then install the software.
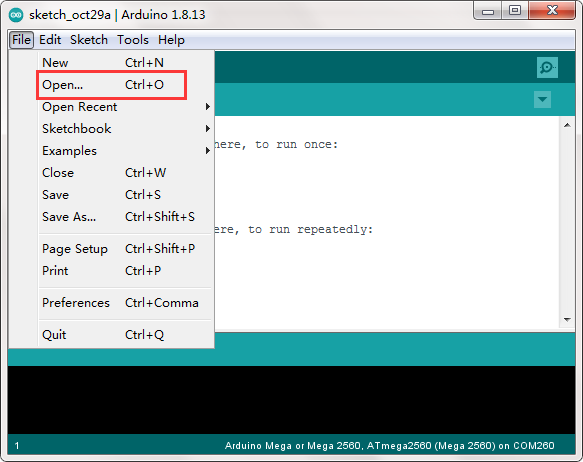
Schritt 3: Verbinde das Mega2560-Board mit dem PC über das USB-Kabel. Öffne die Arduino IDE → klicke auf “Datei” → klicke auf “Öffnen” → wähle den Code “lesson5.ino” im Ordner “lesson5” aus und lade den Code in Arduino.
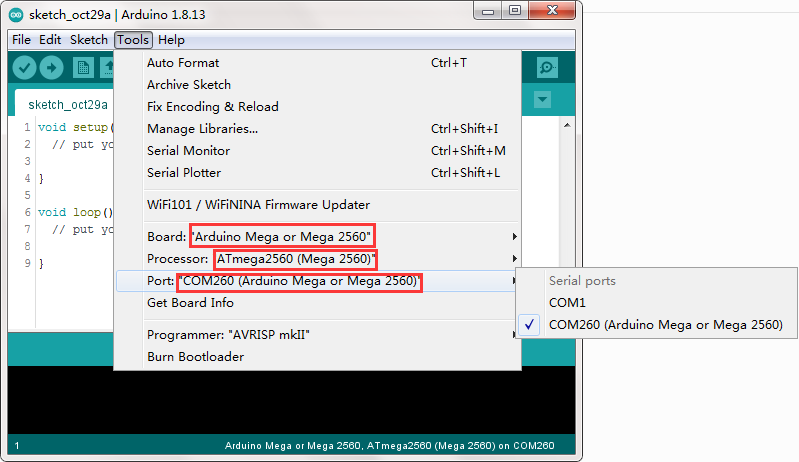
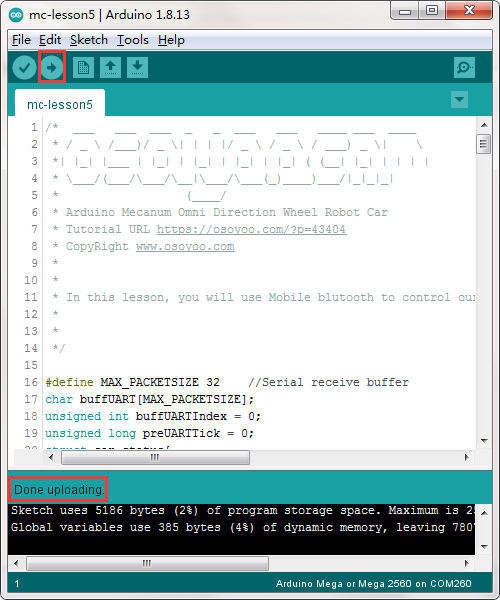
Schritt 4: Wähle das entsprechende Board/Port für dein Projekt aus und lade das Sketch auf das Board hoch.
Nun hast du deine Hardware und Software für diese Lektion installiert. Lass uns unser Auto fahren!
Schritt 1: Stelle dein Roboter-Auto auf den Boden und schalte den Schalter ein.
Schritt 2: Gehe auf dein Mobiltelefon → Einstellungen → Bluetooth-Einstellungen und suche nach einem Bluetooth-Gerät namens HC-02. Verbinde es mit dem Code 1234.
Verbinde dich mit einem Android-Gerät:
Wenn du ein Android-Gerät verwendest und das Bluetooth-Modul noch nicht mit deinem Handy gekoppelt hast, koppel bitte zuerst das Bluetooth-Modul, bevor du die App öffnest. Gehe in den Einstellungen deines Handys zu Bluetooth und suche nach einem Bluetooth-Gerät namens HC02. Koppel es mit dem Passwort 1234. Nachdem das Bluetooth-Gerät HC02 gekoppelt ist, öffne die App. Klicke auf die Schaltfläche “BT Search”, um die App mit dem HC02-Gerät zu verbinden.
Verbinde dich mit einem iOS-Gerät: Wenn du ein iOS-Gerät verwendest, öffne einfach die App, klicke auf die Schaltfläche “Verbinden” und du siehst eine Bluetooth-Liste. Wähle das HC02-Gerät aus.
Schritt 3: Öffne die OSOYOO Imitation Driving Robot App, klicke auf die Schaltfläche “BT Search” und finde das Bluetooth-Gerät, das du gekoppelt hast.
Schritt 4: Schalte den Motor-Wechselschalter ein und klicke auf Speed+, um den Roboter zu beschleunigen, da das Roboter-Auto anfangs sehr langsam ist. Wenn du dein Mobiltelefon neigst, ändert sich die Richtung deines Autos.
Schritt 5: Klicke auf die Schaltfläche “Gear”, um den Gang in Vorwärts- oder Rückwärtsrichtung zu wechseln.
Schritt 6: Drücke F1, um nach links zu lenken, F5, um nach rechts zu lenken, F2 für die diagonale obere linke Richtung, F4 für die diagonale obere rechte Richtung und F3, um anzuhalten.
Motorgeschwindigkeit optimieren für bessere Leistung
To get better running performance result, motor power (speed) value should be adjusted properly as per battery level. If motor power (speed) value is too high, your car might run too fast and easy to out of control. If motor power (speed) is too low, the car might not even move.
To adjust the motor power value, you need to change the 3 constants line 27,28,29 in mecanum-2560-lesson4.ino sketch file:
MIN_SPEED ist die minimale Leistung, die benötigt wird, um das Auto zu starten. Wenn du den Motorhebel in der App auf ROT schaltest, das Auto sich aber nicht bewegt, musst du diesen Wert erhöhen. Wenn das Auto beim Start des Motors zu schnell fährt, musst du diesen Wert reduzieren.
TURN_SPEED und SLOW_TURN_SPEED bestimmen die Drehgeschwindigkeit deines Autos. Wenn dein Auto zu schnell dreht, musst du diese beiden Werte reduzieren. Wenn das Auto zu langsam dreht oder sich gar nicht dreht, erhöhe diese beiden Werte. Stelle sicher, dass SLOW_TURN_SPEED etwa 20 bis 30 niedriger ist als der Wert von TURN_SPEED.
Der Wert BACK_SPEED bestimmt die Geschwindigkeit beim Rückwärtsfahren.
Nachdem die Batterien fast leer sind, musst du möglicherweise den Wert dieser 3 Konstanten erhöhen. Du kannst den Wert allmählich um jeweils 10 erhöhen oder verringern und vergleichen, welcher Wert die beste Fahrleistung bietet.