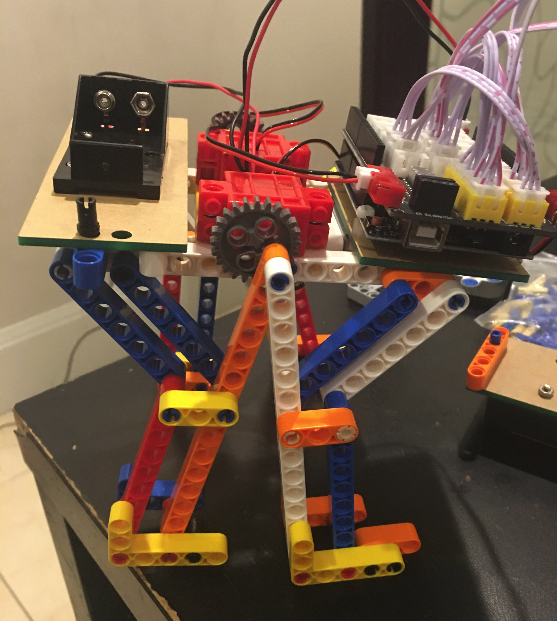
In this lesson, we will show how to assemble a robot dog and make some simple movement.
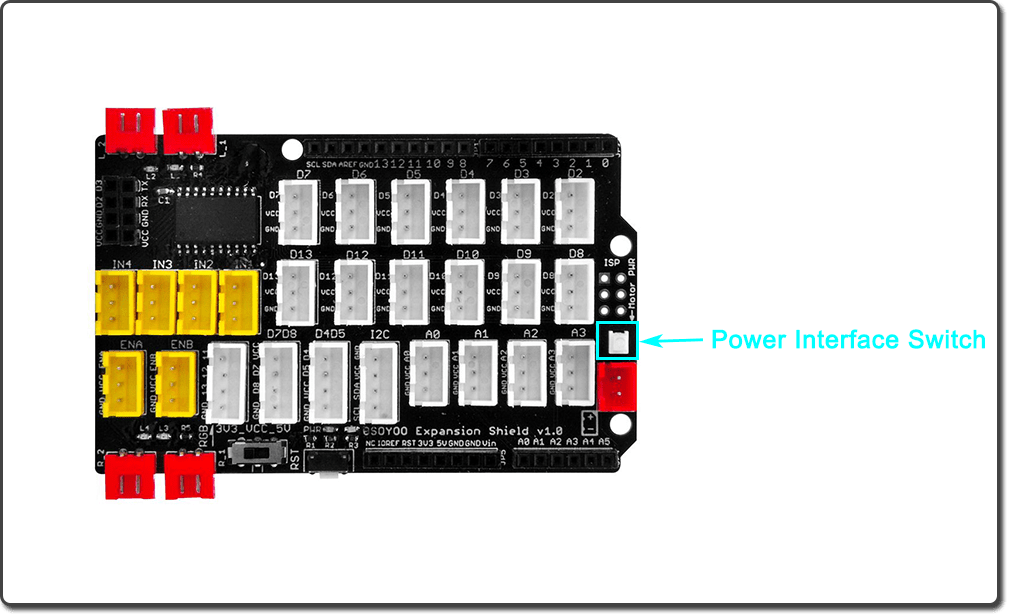
OSOYOO Magic I/O Shield for Arduino
OSOYOO UNO Board
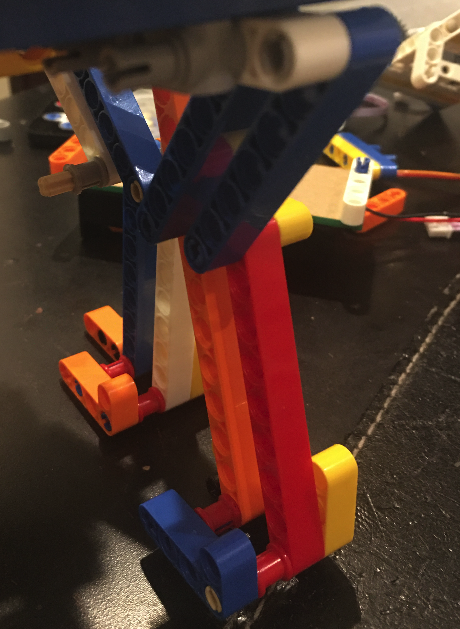
OSOYOO building blocks
Wheels
Acrylic Chassis
Two DC motors
OSOYOO 3-Pin PNP Cable
OSOYOO 4-Pin PNP Cable
USB Cable
PC
Notice:
Not much is needed for this lesson, Make sure you have a good quality syncing cable, do not pick a ‘charge only’ USB cable.
前后定义,万向轮为前方,双轮为后方
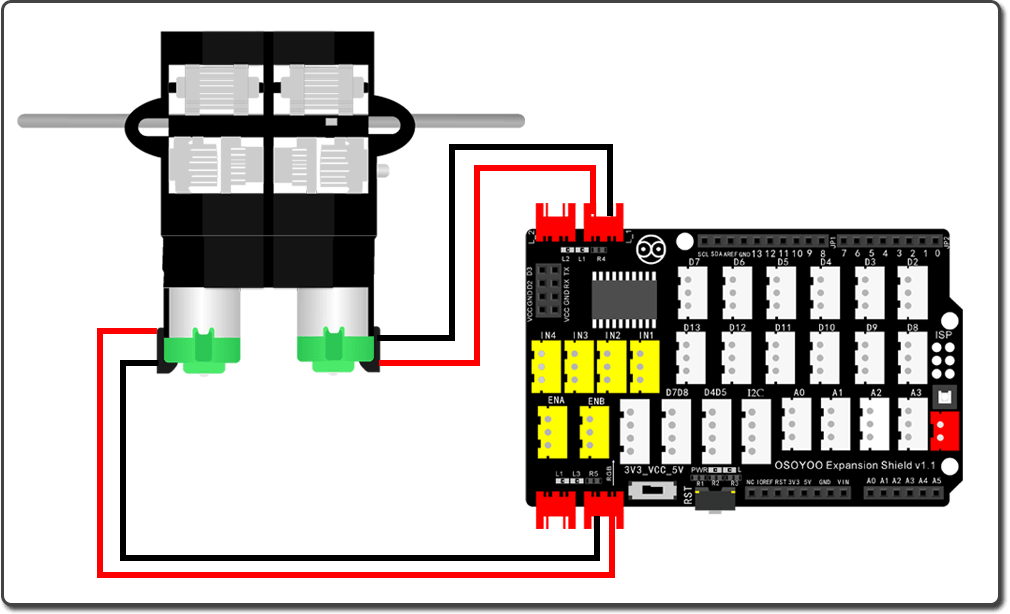
由于积木电机旋转方向与黄色电机相反,因此左右电机接法与传统Model 3小车相反
左轮电机接 R1 or R2
右轮电机接L1 or L2
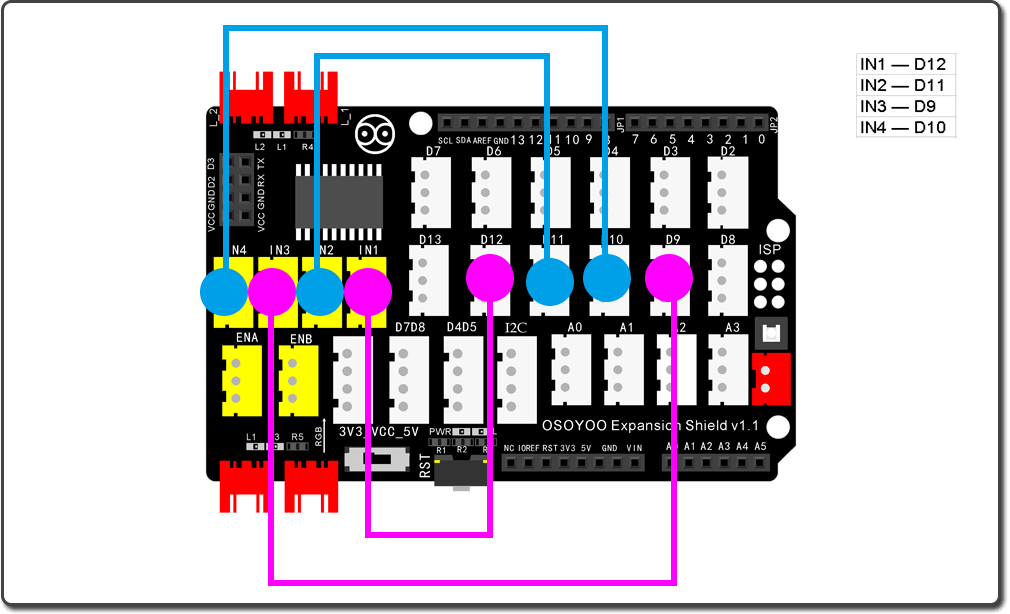
IN1 —D12 //L1 L2 motor direction
IN2 —D11 //L1、L2 motor direction
IN3 —D9 //R1、R2 motor direction
IN4 —D10 //R1、R2 motor direction
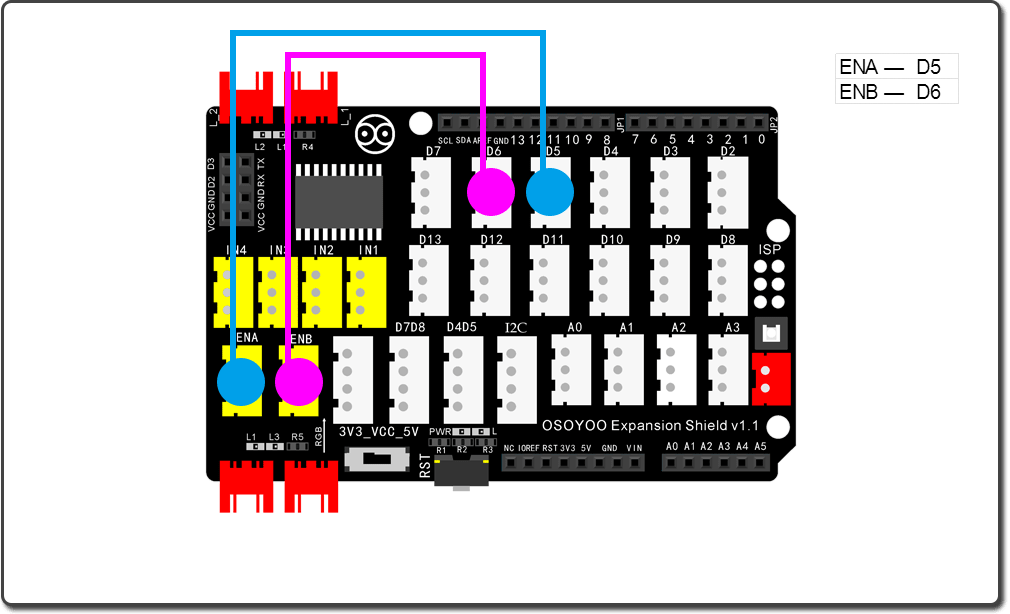
ENA —D5 // Needs to be a PWM pin to be able to control motor speed ENA
ENB —D6 // Needs to be a PWM pin to be able to control motor speed ENB
Step 1) If you haven’t install mBlock software in your PC, please read Lesson 1, download and install the software. Step 2) Run the mBlock PC software by double click the lovely Panda icon. Drag and Drop osoyoo_uno_mext file(downloaded in Step 1) to mBlock software as following:
Now you will see a new device firmware in mBlock, see following picture:
Now mBlock software and OSOYOO_UNO device firmware have been successfully installed in our PC!
Now we will show you how to use blocks to turn above idea into reality.
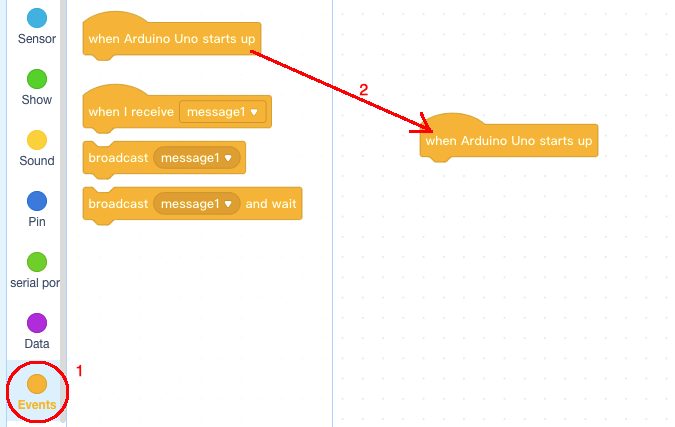
Step 1: Click Events, add when Arduino Uno starts upblock to coding area:
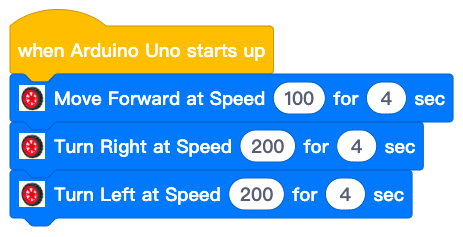
Now we have completed the block programming. The final blocks look like following:
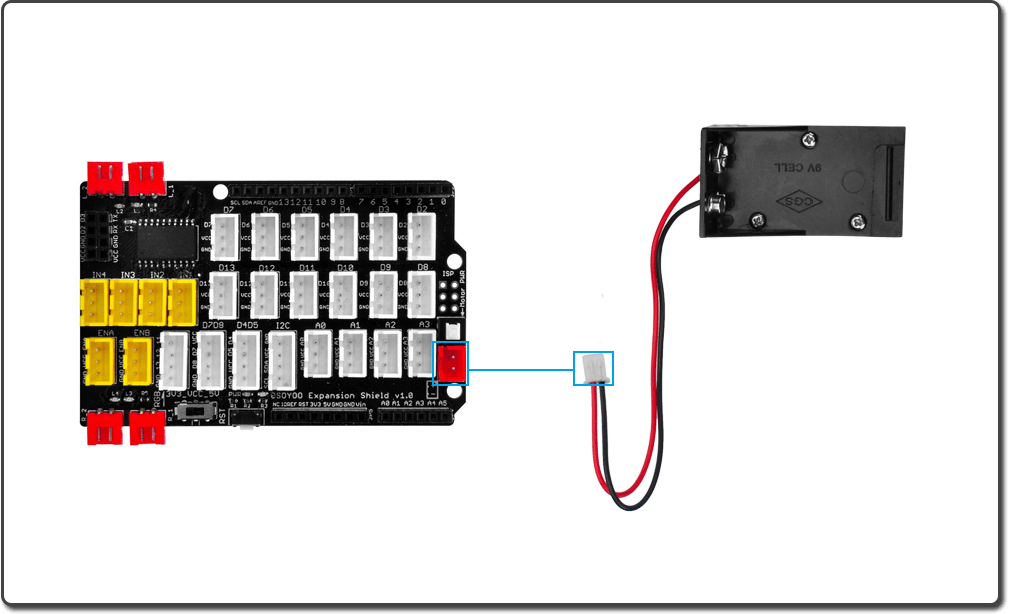
Disconnect Arduino from PC, turn on battery power.
Put the car on the ground, press the Motor Power switch on the OSOYOO Magic I/O Shield for Arduino, the dog will move forward for 4 seconds, then left turn for 4 seconds then right turn for 4 seconds.