Mecanum Wheel Robot Car Komplettpaket (mit 18650 Batterien)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In dieser Lektion verwenden wir Mobile, um unser Roboterauto zu steuern und eine Fahrimitation zu machen. Da es sich um ein Scheinfahren handelt, werden wir in unserer APP ein virtuelles Lenkrad und ein virtuelles Getriebe verwenden, um ihre Gegenstücke in einem echten Auto zu imitieren.
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 x linke Räder/2 x rechte Räder und Motor x 4)
OSOYOO Mega2560 Board voll kompatibel mit Arduino x 1
OSOYOO WiFi-Schild x 1
OSOYOO Modell Y Motortreiber x 1
OSOYOO HC02 Bluetooth-Modul
OSOYOO MG90 Servomotor x 1
OSOYOO Ultraschallsensormodul x1
OSOYOO Ultraschallhalterung
OSOYOO Batteriekasten x 1
OSOYOO 3-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 6-Pin-Überbrückungskabel von Stecker zu Buchse x2
OSOYOO 2-polige XH.25-Buchse auf Buchse x1
OSOYOO 10-Pin-Überbrückungskabel Stecker auf Buchse x1
18650 Batterien (3,7 V) x 2
Sie müssen Lektion 1 (Zusammenbau des Autos) abschließen, bevor Sie mit dieser Lektion fortfahren. Sie müssen nichts ändern, lassen Sie einfach die Hardware-Kabelverbindung so wie sie ist.
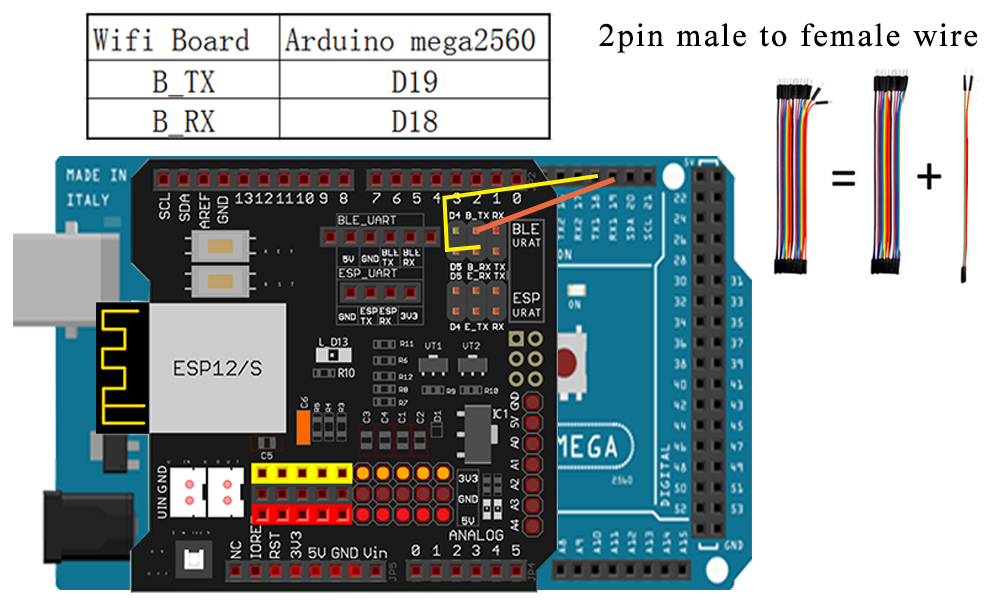
Schritt 1: Verbinden Sie B_TX und B_RX mit D19 und D18.
(Hinweis: Sie müssen 2 Stück Stecker-zu-Buchse-Überbrückungsdrähte aus unserem 10-teiligen Überbrückungskabelbündel aufteilen. Jede Farbe aus dem Bündel ist in Ordnung. Die restlichen 8 Stück Drähte dienen als Ersatzteile für möglicherweise gebrochene oder beschädigte Drähte.)
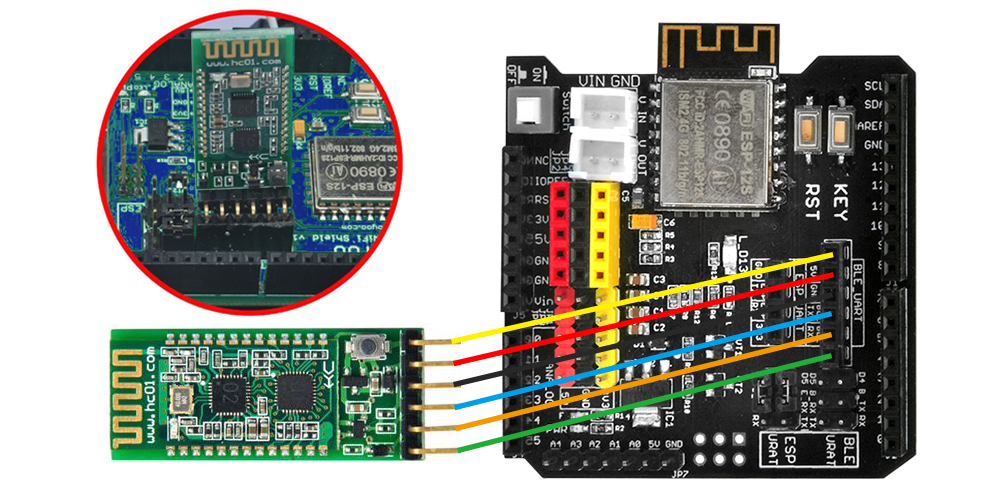
Schritt 2: Das Bluetooth-Modul sollte in den 6-poligen Bluetooth-Steckplatz im OSOYOO WiFi Board eingesetzt werden.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt). Laden Sie die Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en , installieren Sie dann die Software.
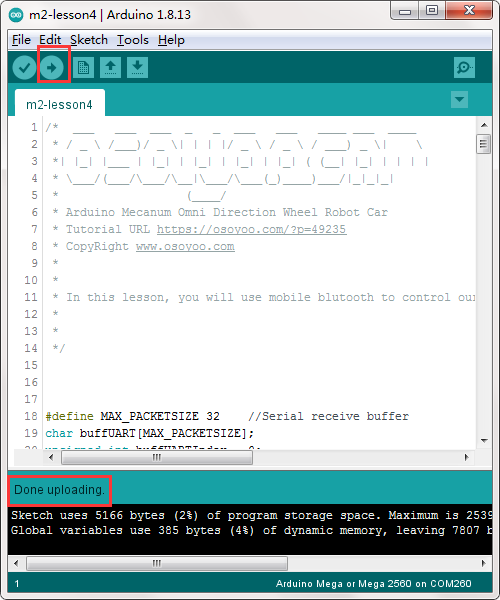
Schritt 3: Schließen Sie das Mega2560-Board mit einem USB-Kabel an den PC an, öffnen Sie die Arduino IDE -> klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code „m2-lesson4.ino“ im Ordner m2-lesson4, laden Sie den Code in Arduino.
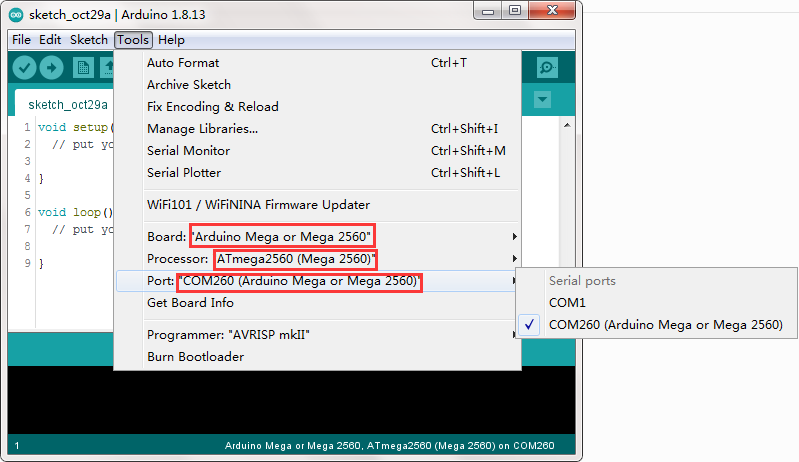
Schritt 4: Wählen Sie das entsprechende Board / Port für Ihr Projekt, laden Sie die Skizze auf das Board hoch.
App:
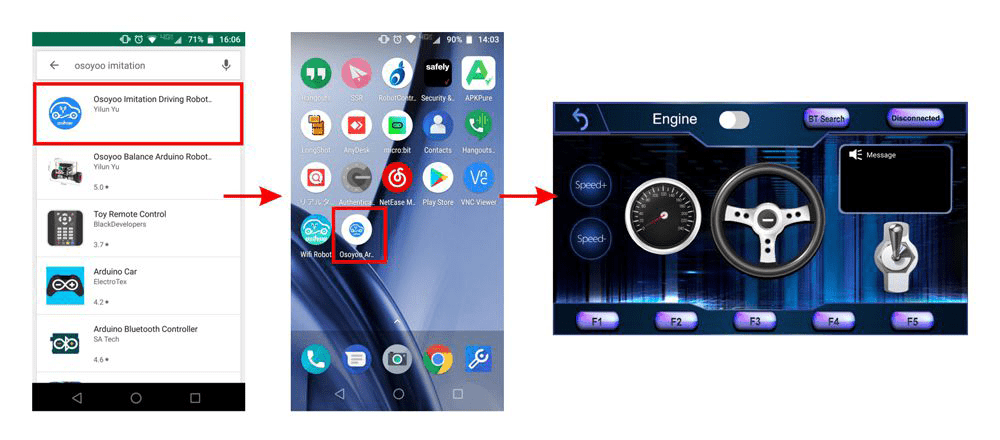
Gehen Sie zu Ihrem Google Play oder Apple APP Store und suchen Sie nach dem APP-Namen „OSOYOO Imitation Driving“, laden Sie die APP wie folgt herunter und installieren Sie sie auf Ihrem Smartphone.
Verbinden Sie das HC-02 Bluetooth mit dem Android-Telefon. Es gibt eine BT-Suchschaltfläche in der Android-APP: Wenn Sie auf diese Schaltfläche klicken, sehen Sie eine Bluetooth-Geräteliste, die mit Ihrer APP gekoppelt wurde. Wählen Sie das HC-02-Gerät, um das Auto zu verbinden. Sobald der HC-02 verbunden ist, ändert sich der Bluetooth-Status von Getrennt zu Verbunden. Sie können Ihr Auto nur steuern, wenn Bluetooth verbunden ist.
Verbinden Sie das HC-02 Bluetooth mit dem iPhone/iPad, klicken Sie einfach auf die Schaltfläche „Verbinden“, ein HC-02-Gerät wird in einer Popup-Liste angezeigt. Klicken Sie auf das HC-02-Gerät, um das Bluetooth-Modul mit Ihrem iPhone zu verbinden. Dann ändert die Schaltfläche “Verbinden” den Namen in Trennen.
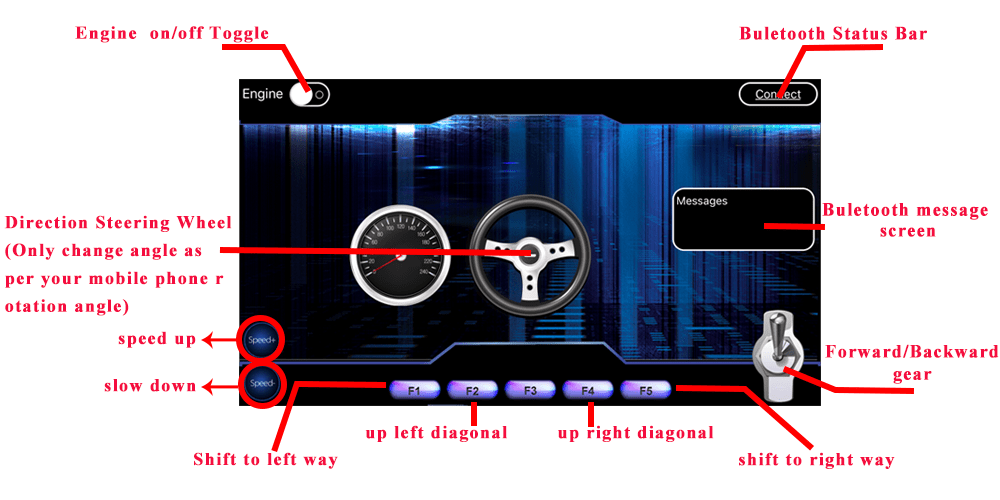
Anzeigeschnittstelle
Schalten Sie den Roboter ein und öffnen Sie die APP.
1) Verbinden Sie die APP mit dem HC-02 Bluetooth-Modul
Mit Android-Gerät verbinden:
Wenn Sie ein Android-Gerät verwenden und das Bluetooth-Modul nicht mit Ihrem Mobiltelefon gekoppelt haben, koppeln Sie bitte zuerst das Bluetooth-Modul, bevor Sie die APP öffnen. Suchen Sie in den Einstellungen Ihres Mobiltelefons -> Bluetooth nach einem Bluetooth-Gerät namens HC02 und koppeln Sie es mit dem Passwort 1234. Öffnen Sie nach dem Koppeln des Bluetooth-HC02-Geräts die APP. Klicken Sie auf die BT-Suchschaltfläche, um die APP mit dem HC02-Gerät zu verbinden.
Mit iOS-Gerät verbinden:
Wenn Sie ein iOS-Gerät verwenden, öffnen Sie einfach die APP, klicken Sie auf die Schaltfläche Verbinden, Sie sehen eine Bluetooth-Liste, wählen Sie das HC02-Gerät aus.
2) Klicken Sie auf Engine Switch, um das Auto zu starten/stoppen
3) Klicken Sie auf die Schaltfläche Geschwindigkeit +/-, um die Geschwindigkeit zu beschleunigen oder zu verringern
4) Drehen Sie das Mobiltelefon, um die Richtung zu ändern (das Lenkrad dreht sich, während Sie das Telefon drehen).
5) Klicken Sie auf die Zahnrad-Schaltfläche, um den Gang in die Vorwärts- oder Rückwärtsrichtung zu wechseln.
6) Drücken Sie F1, um nach links zu wechseln, F5, um nach rechts zu wechseln, F3, um diagonal nach links oben zu wechseln, F4, um diagonal nach rechts oben zu wechseln.
Motordrehzahl-Tuning für bessere Leistung
Um ein besseres Laufleistungsergebnis zu erzielen, sollte der Wert der Motorleistung (Geschwindigkeit) entsprechend dem Batteriestand richtig eingestellt werden. Wenn die Motorleistung (Geschwindigkeit) zu hoch ist, kann Ihr Auto zu schnell und leicht außer Kontrolle geraten. Wenn die Motorleistung (Geschwindigkeit) zu niedrig ist, bewegt sich das Auto möglicherweise nicht einmal.
Um den Motorleistungswert anzupassen, müssen Sie die 3 Konstanten Zeile 24,25,26,27,28 in der Skizzendatei m2-lektion4 ändern:
MIN_SPEED ist die zum Starten des Fahrzeugs erforderliche Mindestleistung. Wenn der APP-Motorumschalter auf ROT geschaltet wird, Ihr Auto sich jedoch nicht bewegt, müssen Sie diesen Wert erhöhen. Wenn das Auto beim Motorstart zu schnell fährt, müssen Sie diesen Wert verringern.
Der Wert TURN_SPEED , SLOW_TURN_SPEED bestimmt die Wendegeschwindigkeit Ihres Autos. Wenn Ihr Auto zu schnell dreht, müssen Sie diese beiden Werte reduzieren, wenn es zu langsam oder gar nicht dreht, erhöhen Sie diese beiden Werte. Stellen Sie SLOW_TURN_SPEED immer etwa 20 bis 40 niedriger als den TURN_SPEED-Wert ein.
Der Wert BACK_SPEED bestimmt die Rückwärts-Rücklaufgeschwindigkeit.
Wenn die Batterien zur Neige gehen, müssen Sie möglicherweise den Wert dieser 3 Konstanten erhöhen. Sie können diese Werte schrittweise um jeweils 10 erhöhen oder verringern und vergleichen, welche Werte die beste Tracking-Leistung aufweisen.















The app is not available for my android version 13.
Thanks