Sie können das Benutzerhandbuch von herunterladen:

In diesem Lernprogramm werden wir das Auto benutzen, um einige einfache Bewegungen auszuführen. Sobald die Installation des Autos abgeschlossen ist, ist es sehr wichtig, die Installation und den Beispielcode zu testen. Wenn Sie die Testbewegung dieser Lektion bestanden haben, bedeutet dies, dass das OSOYOO Basic Board für Arduino, das Motorsteuerungsmodul, die Motoren, die Batterien, das Chassis und die Kabelverbindungen zwischen diesen Teilen gut funktionieren.
Wenn Sie den Rahmen des Autos nicht fertigstellen können, lesen Sie bitte Lektion 1


Anschluss: (Achtung bitte: es gibt sechs Steckbrücken auf ENA/ENB/IN1/IN2/IN3/IN4)
IN1 an D12 (Überbrückungskappe)
IN2 an D11 (Überbrückungskappe)
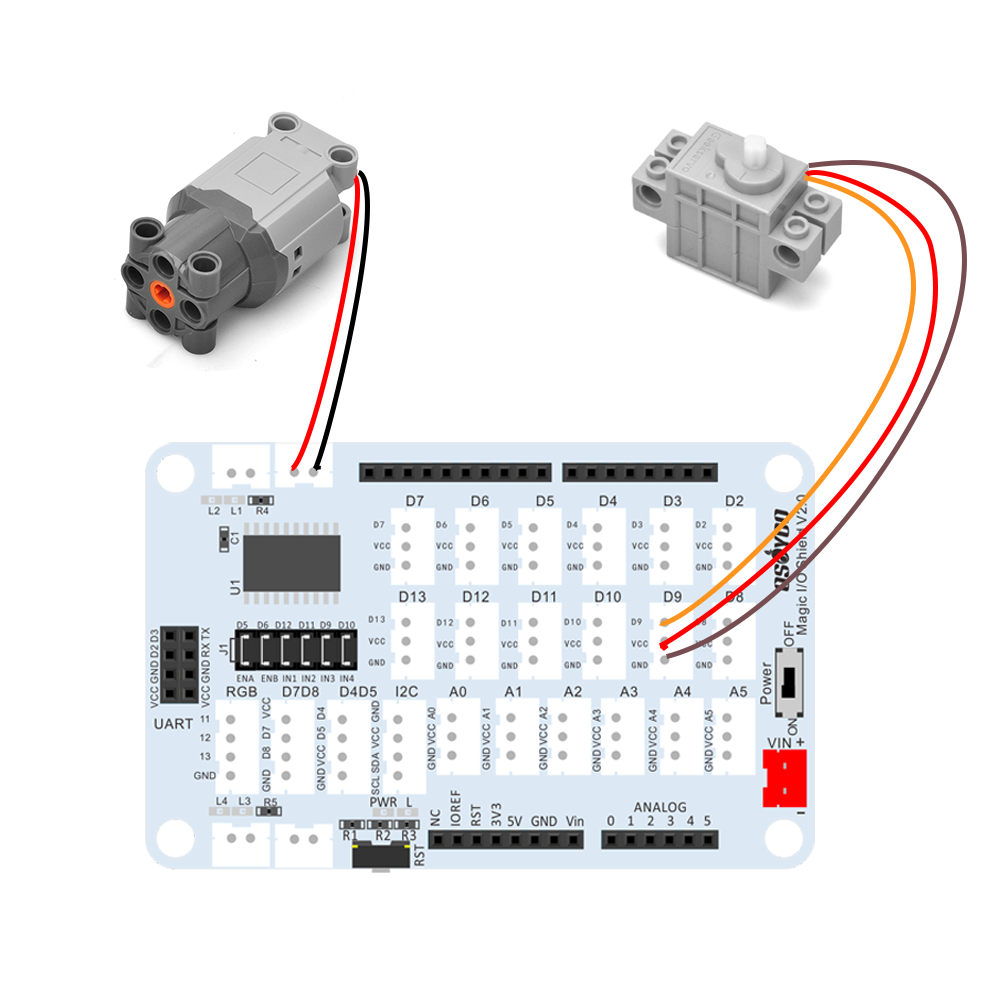
Motor an L1
Servo an D9
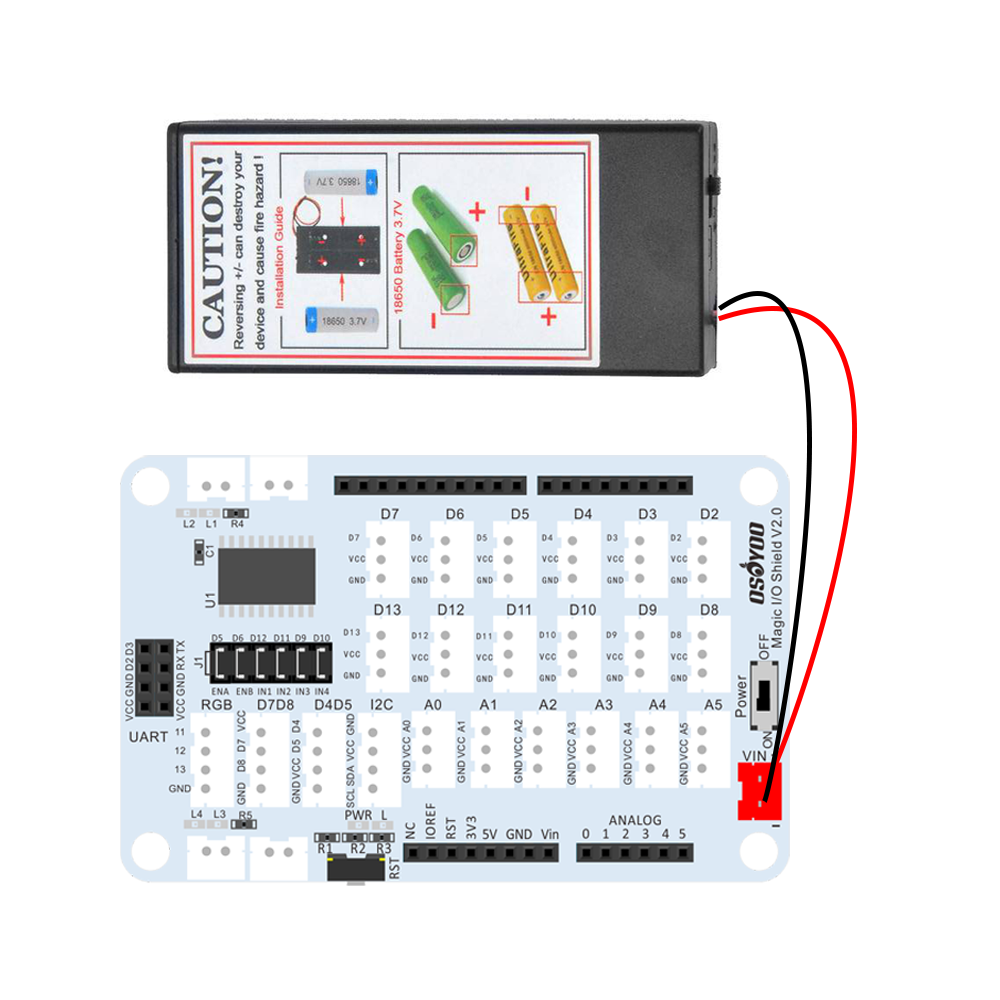
Schließen Sie das Batteriefach wie folgt an den Stromanschluss des Magic I/O Shield an:
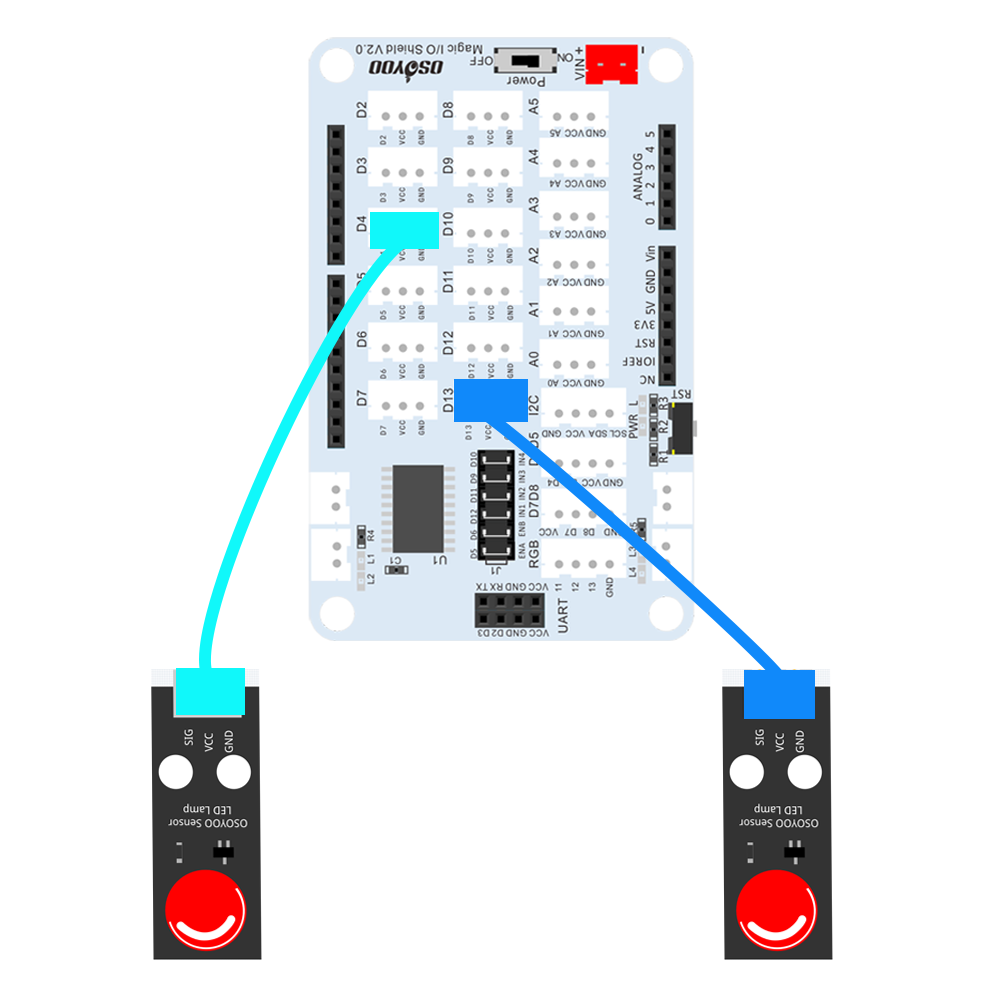
Schließen Sie das rote LED-Modul von OSOYOO wie folgt an den Stromanschluss des Magic I/O Shields an:
Linke LED – D4
Rechte LED – D13

SCHRITT 1:
Installieren Sie die neueste IDE (Wenn Sie eine IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt).
Laden Sie die IDE von https://www.arduino.cc/en/software herunter, und installieren Sie die Software.
SCHRITT 2:
Laden Sie die Zip-Datei der PWMServo-Bibliothek von https://osoyoo.com/driver/sg90car/PWMServo.zip herunter,
dann importieren Sie die Bibliothek in die Arduino IDE (Öffnen Sie die Arduino IDE-> klicken Sie auf Sketch->Include Library->Add .Zip Library)

Sie werden ein Pop-up-Fenster sehen, jetzt können Sie zu Ihrem Download-Ordner gehen und die PWMServo.zip-Datei auswählen und diese Datei in die Arduino-Bibliothek hochladen.
SCHRITT 3:
Laden Sie https://osoyoo.com/driver/2022008400/lesson2.zip herunter, entpacken Sie die Datei, und Sie werden einen Ordner namens lesson2 sehen.
SCHRITT 4:
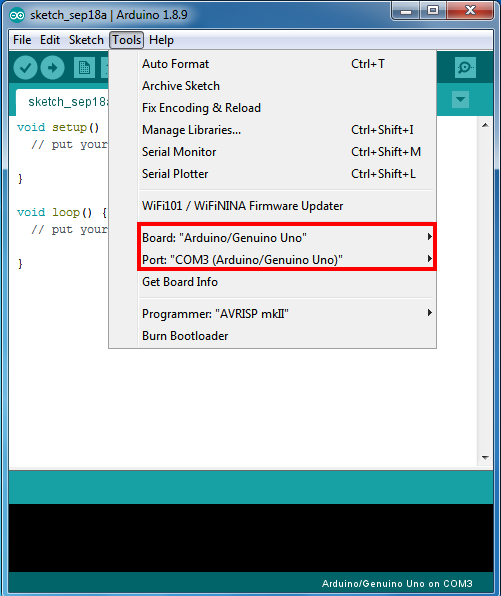
Verbinden Sie das UNO R3 Board mit einem USB-Kabel mit dem PC, öffnen Sie die IDE und wählen Sie das entsprechende Board/Port für Ihr Projekt.
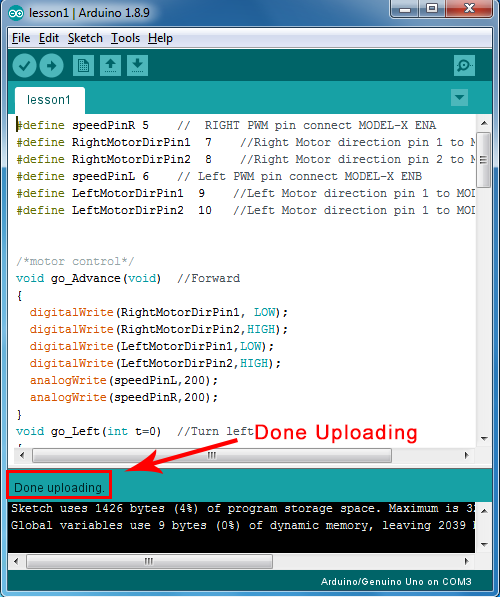
Beachten Sie: Schalten Sie die Batterie aus oder ziehen Sie den Netzadapter ab, wenn Sie den Sketch-Code auf das OSOYOO Basic Board für Arduino hochladen.
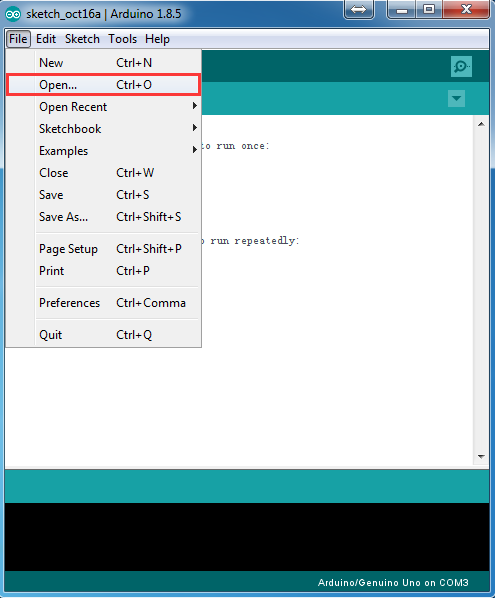
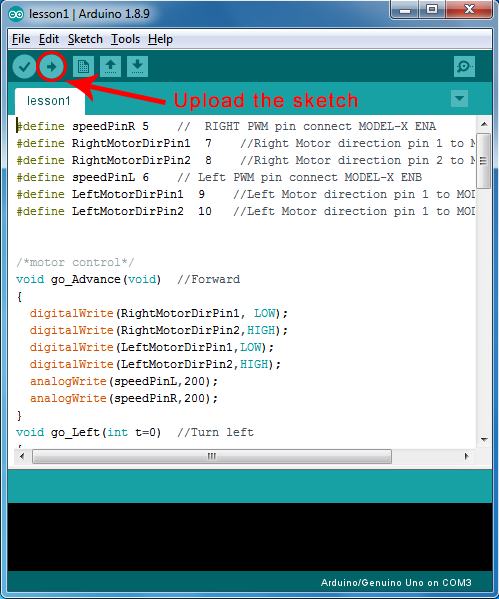
Klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code “lesson2.ino”, laden Sie den Code in das OSOYOO Basic Board for Arduino und laden Sie dann den Sketch auf das Board.
SCHRITT 5:
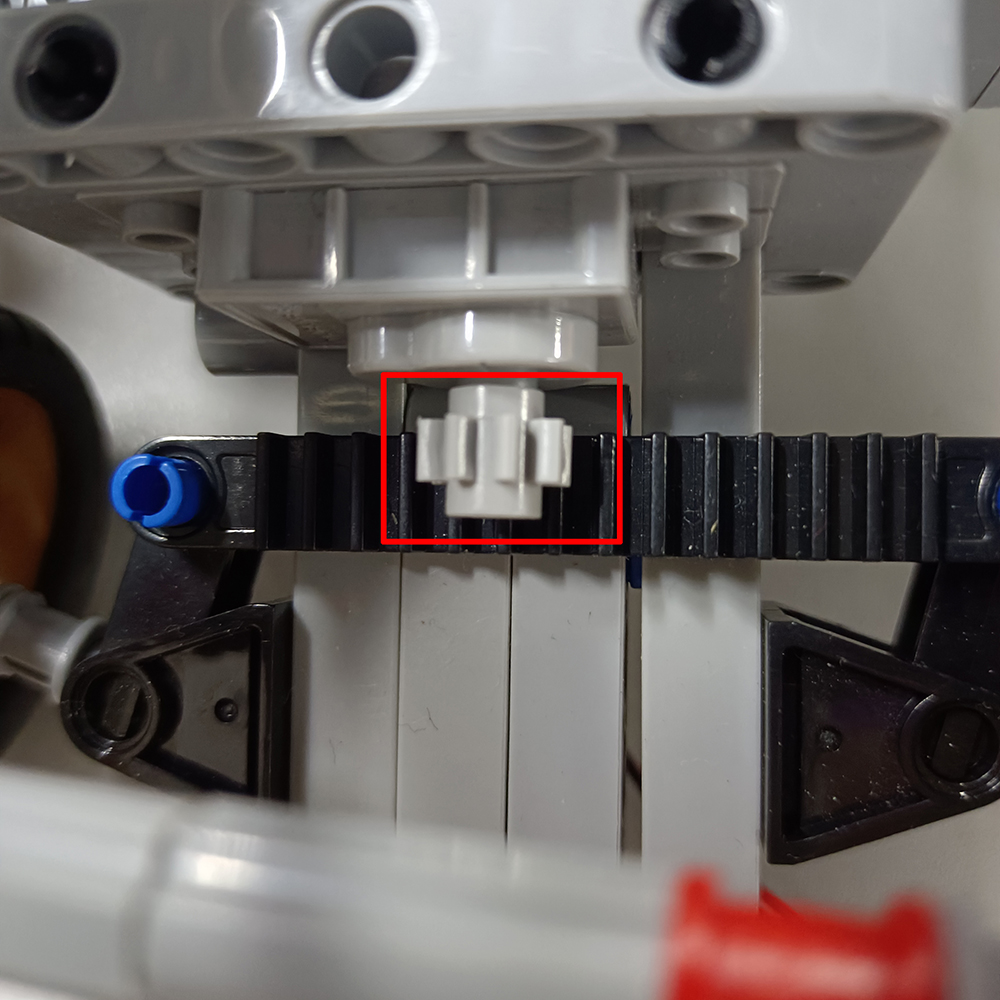
Servo-Ausrichtung: Wenn Ihr Lenkservo nicht in die vordere Mitte zeigt, haben Sie zwei Möglichkeiten:
Option 1 ) Sie können das kleine Zahnrad vom Servo entfernen, die Richtung des Vorderrads manuell neu ausrichten und dann das kleine Zahnrad wieder auf dem Servo installieren.
Option 2) Sie können den Standardwert der folgenden Linie ändern:
#define FRONT 90 // 90 degree means steering to front
Wenn Ihre Lenkräder nach links neigen, erhöhen Sie den Wert von 90 auf 95, 100, 105 …
wenn Ihre Lenkräder nach rechts neigen, verringern Sie den Wert von 90 auf 85,80,75 …
Führen Sie die Skizze erneut aus, bis Ihre Lenkräder schließlich nach vorne zeigen.
Dann notieren Sie den FRONT-Wert. Wir werden diesen Wert verwenden, um den Lektion3,4,5-Sketchcode zu ändern und das Lenkservo immer mit dem Standardwert FRONT nach vorne zu stellen.

1. trennen Sie das OSOYOO Basic Board für Arduino vom PC und vergewissern Sie sich, dass der Netzschalter des OSOYOO Motor Shields ausgeschaltet ist, dann vergewissern Sie sich, dass sich die Batterie im Batteriefach befindet.
(Hinweis: Vergewissern Sie sich, dass die Polarität korrekt ist, sonst kann Ihr Gerät zerstört werden und es besteht Brandgefahr).
2. Stellen Sie das Auto auf den Boden, schalten Sie den Schalter der Batteriebox und des OSOYOO Motor Shields ein, das Auto sollte vorwärts, rückwärts, links, rechts, rückwärts, zurück nach rechts, zurück nach links fahren und dann anhalten.
Hinweis: Wenn sich das Auto nicht wie oben beschrieben bewegt, sollten Sie die Kabelverbindung, die Überbrückungskappen auf dem OSOYOO Motor Shield und die Batteriespannung (muss über 7,2 V liegen) überprüfen..
3. Wenn Sie den Winkel der rechten oder linken Seite ändern wollen, editieren Sie bitte die folgende Zeile des Codes und laden Sie die Skizze erneut hoch:
int RIGHT=FRONT+80;
int LEFT=FRONT-38;
4. Wenn Sie die Geschwindigkeit des Autos ändern wollen, überarbeiten Sie bitte den folgenden Code des Sketches (Hinweis: der maximale Wert ist 255)
#define SPEED 190
#define HI_SPEED 220