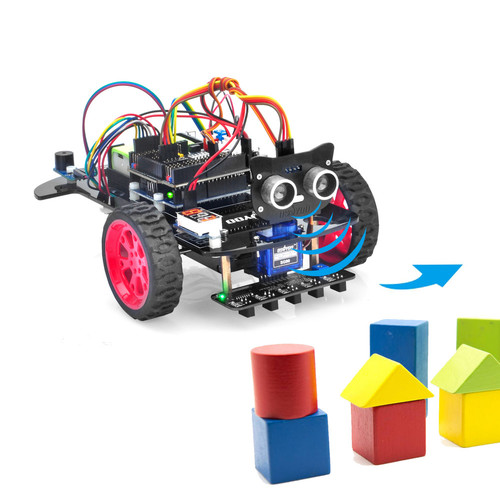
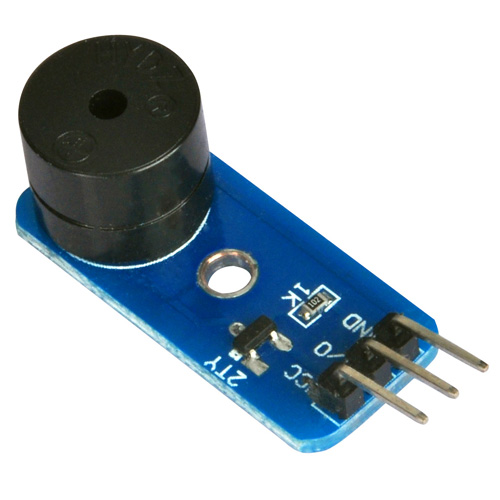
En esta lección, debes completar la lección 4 antes de continuar con esta lección. Usamos el módulo ultrasónico para “ver” obstáculos y medir la distancia. Si la distancia es menor que el valor de umbral predefinido, el zumbador sonará y el coche girará automáticamente alrededor del obstáculo.
Instalación de hardware
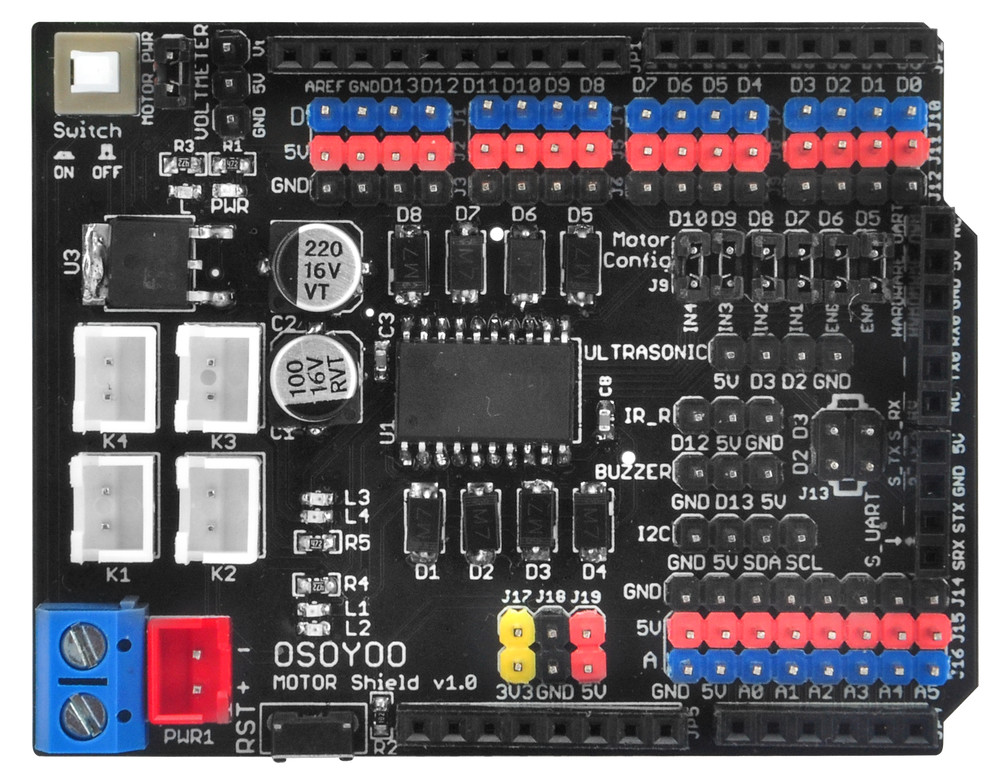
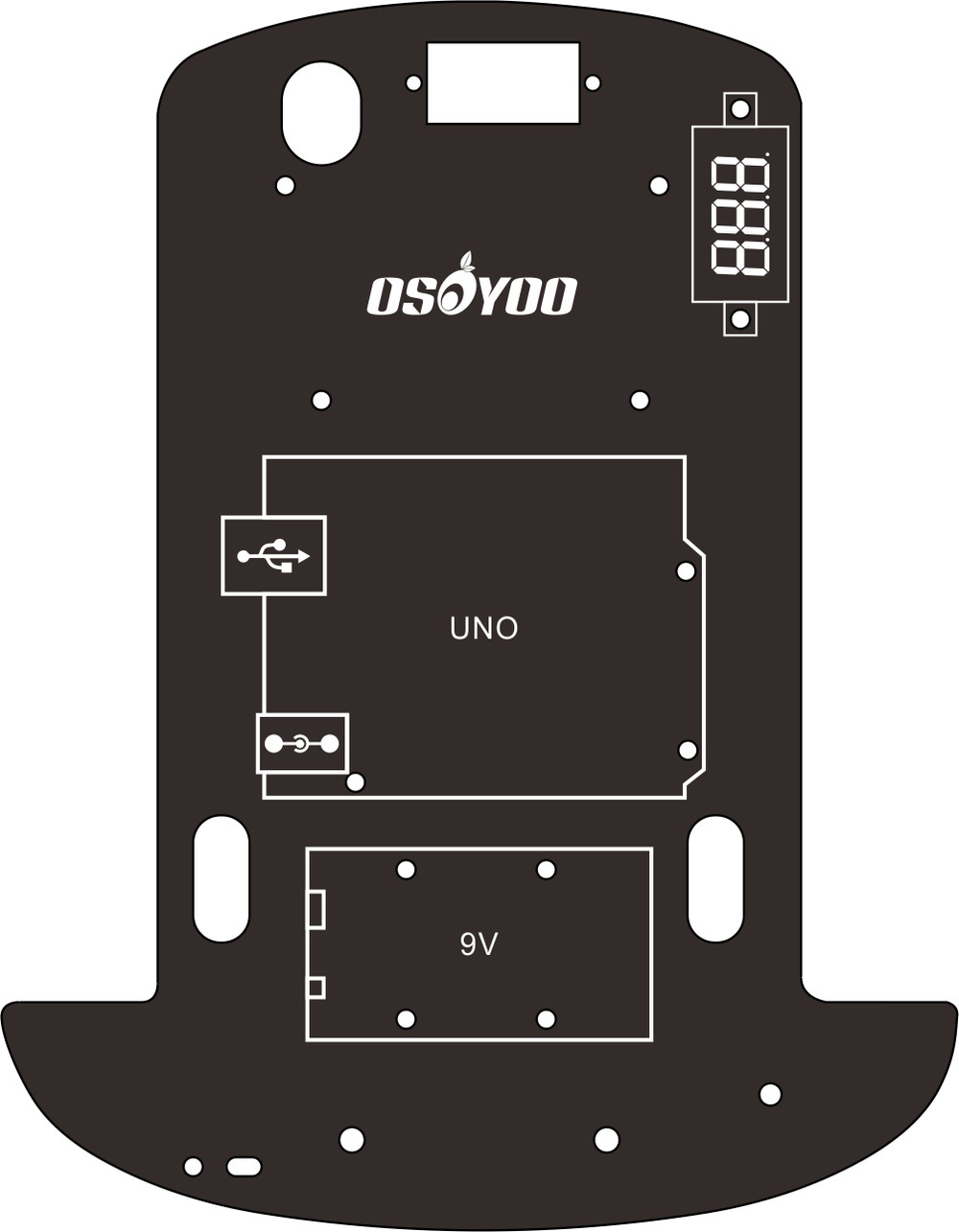
Instale el marco básico del automóvil inteligente según la lección 4 . Si ya ha completado la instalación en la lección 4, déjelo como está.
Descarga Lesson 5 simple code , y descomprime el archivo zip descargado lesson5.zip, verás una carpeta llamada lesson5.
Paso 3:
Conecte la placa básica OSOYOO para Arduino a la PC con un cable USB, abra el IDE -> haga clic en Archivo -> haga clic en Abrir -> elija el código “lesson5.ino” en la carpeta lesson5, cargue el código en la placa.
Aviso: Apague la batería o desconecte el adaptador de energía al cargar el código de programa en la Placa Básica OSOYOO para Arduino.
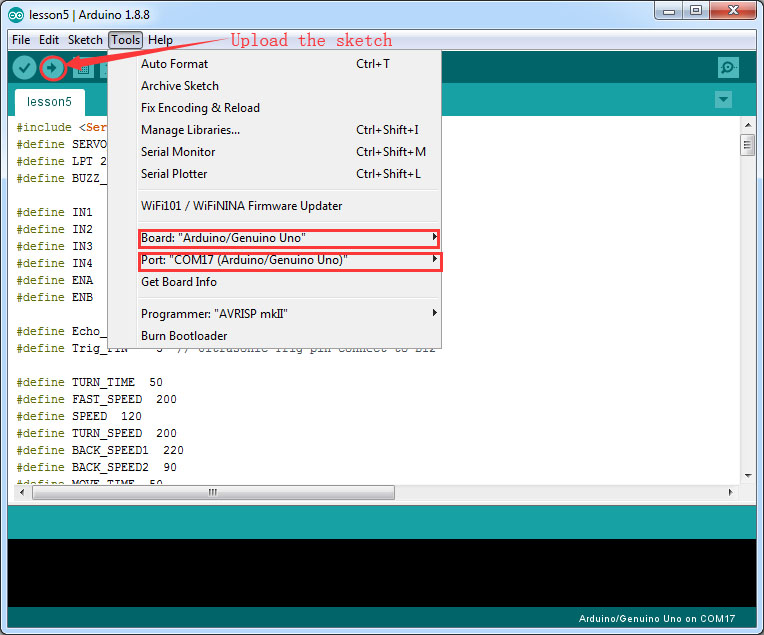
Paso 4:
Elija la placa y el puerto correspondientes para su proyecto, cargue el bosquejo en la placa.
Paso 5:
Alineación inicial de la dirección del servo del sensor ultrasónico
Después de encender el coche, escuchará un sonido largo de pitido, luego el servo realizará algunos movimientos y finalmente se detendrá en una dirección durante 5 segundos.
Durante estos primeros cinco segundos, debe asegurarse de que el sensor ultrasónico (dos ojos) esté mirando hacia adelante.
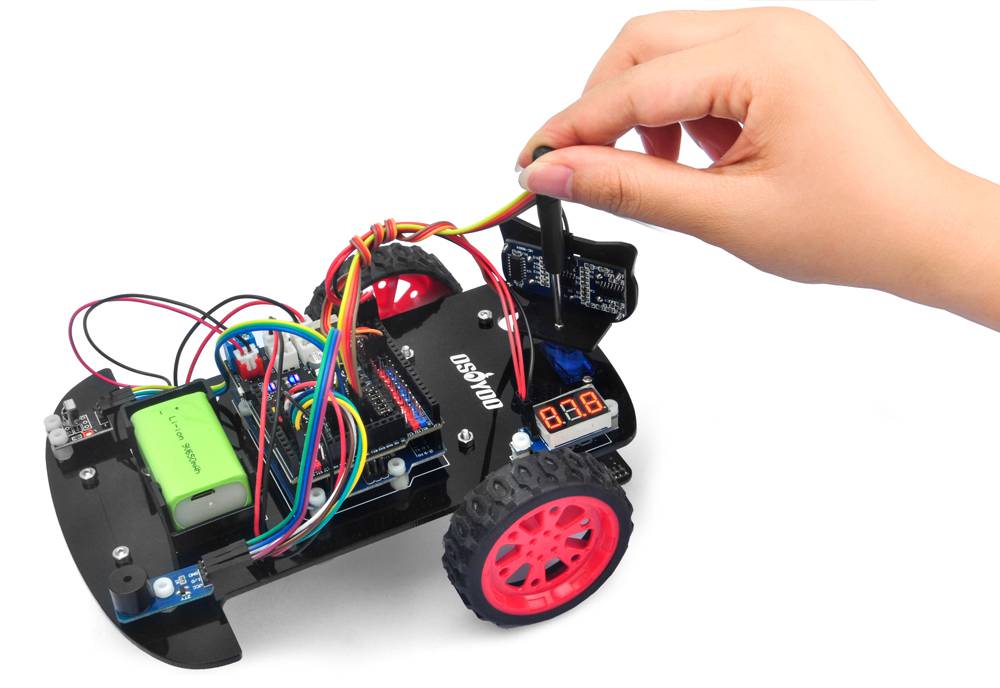
Si no está mirando hacia adelante, debe apagar el coche de inmediato, quitar el sensor del servo, reinstalarlo y hacer que mire hacia adelante en la dirección correcta, como se muestra en la imagen a continuación. De lo contrario, el programa de evasión de obstáculos no funcionará correctamente.
Después de ajustar la dirección del sensor, encienda el coche de nuevo. Después de escuchar el pitido largo, el sensor debe estar mirando hacia adelante como en la imagen a continuación. Si su dirección no es hacia adelante, apague el coche y realice nuevamente la alineación de dirección.
Pruebas:
Encienda el coche, si el módulo ultrasónico se gira hacia la posición de vista frontal, significa que no necesita ajustar la posición del sensor nuevamente. Solo espere 5 segundos. Si no se detecta ningún obstáculo, el coche avanzará. Si se detecta algún obstáculo, el coche se detendrá, el módulo ultrasónico se moverá de derecha a izquierda para detectar obstáculos circundantes. El coche robot decidirá girar a la izquierda, a la derecha o hacia atrás según los datos de detección de obstáculos y nuestro algoritmo de evasión de obstáculos.
Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
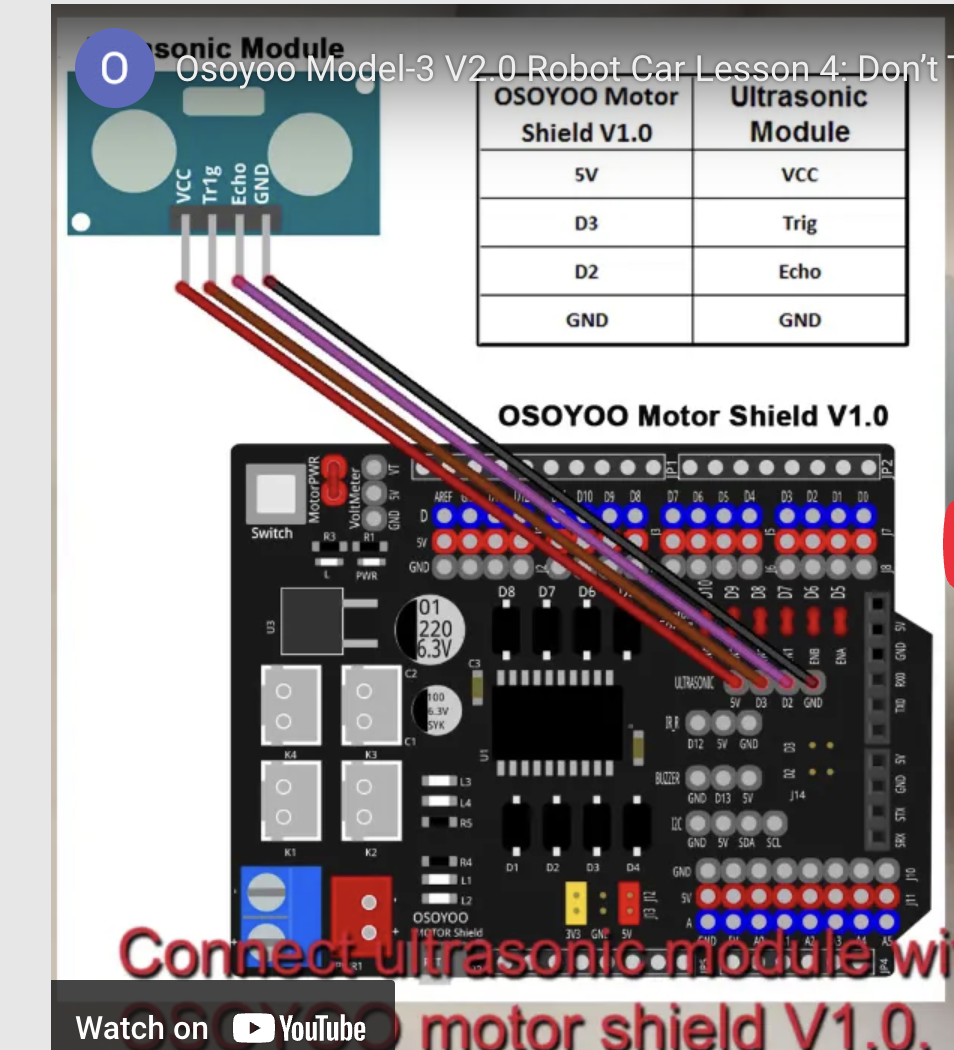
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.





























Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
bonjour je ne comprend pas la voiture tourne sa tête mais au lieu d’avancer, elle recule de plus elle ne répond plus a la télécomande Merci
If you meet this problem in the lesson Obstacle avoidance, please check the wires on Ultrosonic Sensor or change another Ultrosonic Sensor
Hi, when i did this lesson the car kept on moving back without doing anything and the car when i plug it in my computer it trys to move back
Hi, the robot is just seeing obstacles everywhere? So it scans around, then turns 90 degrees eternally – what’s wrong here?
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
Don’t you guys have a mblock graphic programming for this one like the one for the Model T. Would be very didactic for the little kids.
Thanks
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.