Descripción general
Puedes usar el microcontrolador UNO R3 y agregar componentes externos para completar una variedad de experimentos asombrosos, como la construcción de un robot inteligente. Cuando construyas tu robot, es necesario utilizar la placa controladora de motores para conducir los motores DC, sin embargo, a veces es necesario conectar la placa controladora de motores al UNO mediante muchos cables puente, lo que puede resultar bastante incómodo.
El shield de motores se puede alimentar directamente desde Arduino o desde una fuente de alimentación externa. Se recomienda encarecidamente utilizar una fuente de alimentación externa para alimentar el shield de motores.
Esta placa también proporciona indicadores LED de dirección para ambos canales y esto es muy útil durante la etapa de configuración para verificar el comportamiento del firmware; los indicadores LED también funcionan sin aplicar un motor real a la salida.
Características
- Pin out estándar para UNO Shield
- Basado en el chip controlador de motor L293DD
- Conduce 2 motores de corriente continua o 1 motor paso a paso
- Entrada de energía externa disponible
- Interruptor de encendido externo
- Botón de reinicio (RST)
- Interfaces de energía de 5V/3.3V/GND
- Jumper de interruptor de energía del controlador de motor
- Interfaz de hardware UART/Interfaz de software UART
- Interfaces de sensores
- Todos los pines GPIO disponibles
- Cableado conveniente para el motor a través de jumpers
- 4 luces indicadoras de dirección
- Disipador de calor para un mejor rendimiento
- Función de IoT de Wifi cuando se trabaja con el módulo de Wifi OSOYOO (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Función Bluetooth cuando se trabaja con el módulo Bluetooth HC-02 (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)PRECAUCIÓN:
El CI controlador y el disipador de calor pueden volverse muy calientes cuando se trabaja con una corriente superior a 1000mA.
Especificaciones
- Voltaje de entrada de la parte lógica VD: 5V
- Voltaje de entrada (recomendado): 7 ~ 12V
- Voltaje de entrada (límite): 6-20V
- Corriente de trabajo de la parte lógica Iss: <36mA
- Corriente de funcionamiento de la parte de conducción Io: 1.2A
- Disipación máxima de potencia: 25W (T = 75 Celsius)
- Nivel de entrada de señal de control: Alto 2.3V bajo -0.3V
- Temperatura de trabajo: -25 + 130 Celsius
- Toma de corriente de tornillo: Terminal de paso de 5.0mm
- Clip de cinturón y se puede controlar a través del acceso de fila frontal de la señal
- Tipo de controlador: Controlador de puente H de doble potencia
- Ocupación de pines: D7 ~ D10 control directo del motor
- Admite control de velocidad del motor en modo PWM / PLL
- Peso 29 g
- Dimensiones 68.5 x 53 mm
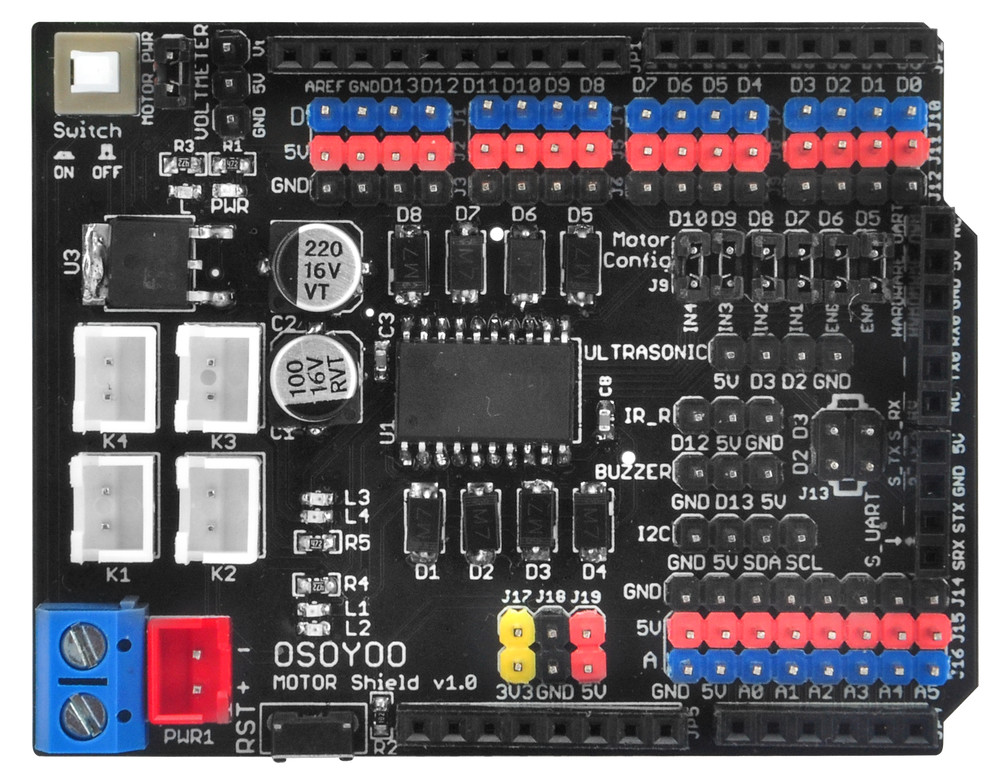
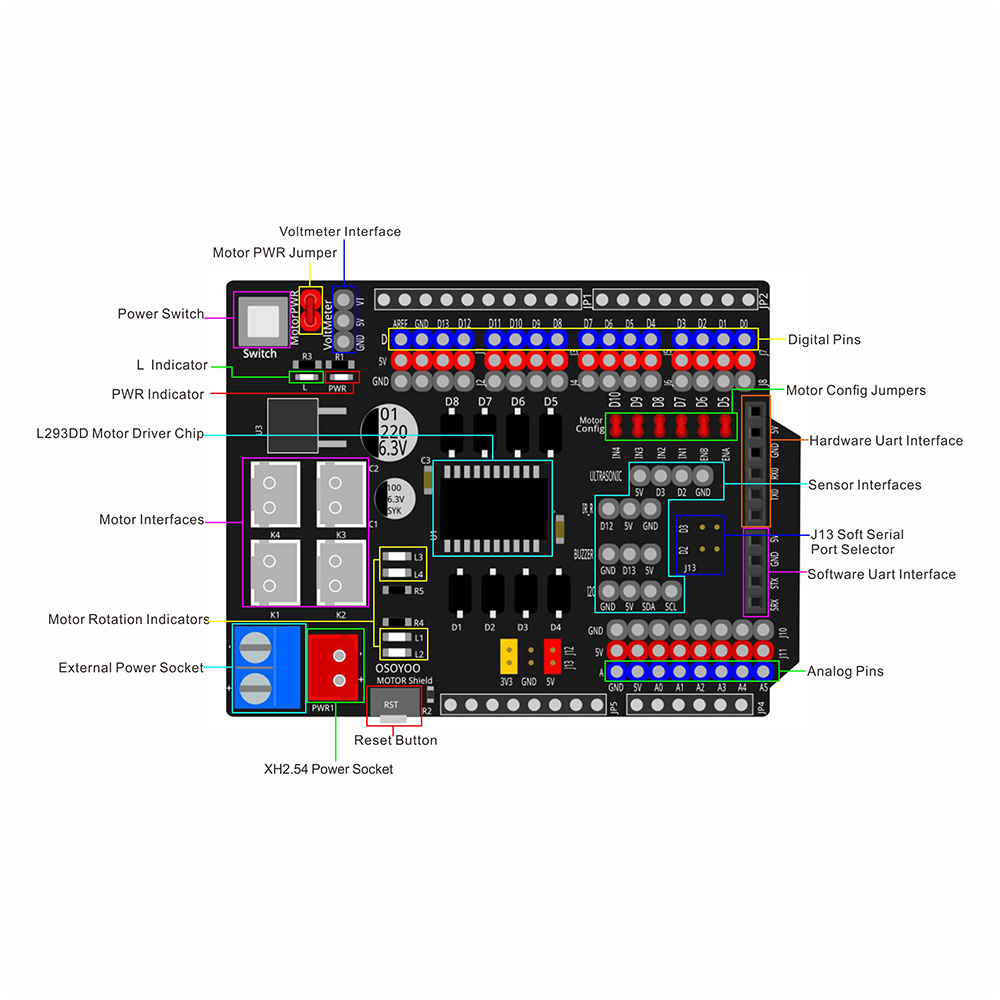
Resumen del hardware:
-
- Interruptor de alimentación: Controla la entrada de energía externa, presiona el interruptor para encender la energía y vuelve a presionar para apagarla.
- Puente Motor PWR: Conecta la tapa del puente, el chip de control del motor funciona normalmente, quita la tapa del puente y deja de funcionar.
- Interfaz del voltímetro: Interfaz de voltímetro digital de tres hilos, muestra el voltaje de la fuente de alimentación externa.
- Salida de pin digital: Conecta las interfaces de señal digital.
- Indicador L: Conectado con el pin de Arduino D13.
- Indicador de potencia:
- Puentes de configuración del motor: cuando el puente está conectado, el pin de control del chip del motor se conecta al puerto io de Arduino correspondiente de forma predeterminada. Si es necesario, también puede quitar la tapa del puente y conectar otros puertos io de Arduino a través de un cable Dupont para controlar el motor. Motor IN1-Arduino D7 Motor IN2-Arduino D8 Motor IN3-Arduino D9 Motor IN4-Arduino D10 Motor ENA-Arduino D5 Motor ENB-Arduino D6
- Interfaz del motor: K1 y K2 (K3 y K4) pueden conectar el Motor A (B) para el motor CC.
- Chip del controlador del motor L293DD
- Indicadores de rotación del motor
- Toma de alimentación externa (toma de alimentación azul/toma de alimentación XH2.54): Fuente de alimentación externa para el escudo del motor, rango de 6-15V.
- Botón de reinicio: Presiona para reiniciar el escudo y Arduino.
- Salida de pin analógica
- Interfaces de sensores: Para facilitar el cableado, diseñamos interfaces correspondientes para los sensores más comúnmente utilizados y los conectamos a los pines de señal de Arduino
- Interfaz de hardware Uart: Conecte el Arduino D1 a TX0, conecte el Arduino D0 a RX0.
- Interfaz de software Uart: Conéctese a aquellos pines que permiten la comunicación serial en Arduino.
- Selector de puerto serie suave J13: J13 proporciona una forma conveniente de configurar el puerto serie suave. Puede utilizar un puente para configurar los puertos D2 y D3 como puertos serie suave. Si necesita utilizar otros pines, puede quitar la tapa del puente y utilizar cables puente para conectar S_TX/S_RX a aquellos pines que permiten la comunicación serial en Arduino.
- Descarga del archivo de pieza Fritzing:
https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip









Hello!
I want to use Arduino attachInterrupt() to pins D2 and D3 (to perform pulse counting). Are these used by the UltraSonic sensor?
D3 does not seem to rise above 2.5V and I am trying to understand why.
Many thanks,
– jon
FWIW: This was my coding error. Pin3 was set to output using pinMode(Trig_PIN, OUTPUT); I need to move the echo sensor to other, unused, pins.
Hi,
I am trying to use the soft UART serial ports SRX and STX on the motor project for two-port receive. What should I define the two pins as(using SoftwareSerial Library)?
Also, if I were to use the J13 serial ports and the SRX/TX ports at the same time, would the arduino communicate with both ports at the same time? If so, what should I write in my code to declare them as?
Hi there!
I want to know how can I, using block programming, reverse the motors direction but as one of them is connected to Digital Pin 8 and another to Pin 10 (K2 & K3 or K1 and K2) I have no mean to do it through the normal HIGH/LOW values (full speed vs. stop, but no reverse).
Thanks!
in order to use mBlock programming, you need connect
IN1 —D12 //Left motor direction
IN2 —D11 //Left motor direction
IN3 —D9 //Right motor direction
IN4 —D10 //Right motor direction
ENA —D5 // Needs to be a PWM pin to be able to control motor speed ENA
ENB —D6 // Needs to be a PWM pin to be able to control motor speed ENB
You can use Forward Block to make car move forward and Backward to make car make reverse roate.
For more information, please read following project:
https://osoyoo.com/2021/08/22/arduino-graphic-programming-learning-kit-lesson-14-basic-car/