En esta lección, usaremos una aplicación móvil para controlar nuestro Auto Robot y hacer una conducción por imitación. Dado que se trata de un simulacro de conducción, utilizaremos un volante y un reloj indicador virtual en nuestra aplicación para imitar a sus contrapartes en un automóvil real.
– Chasis de Auto Robot OSOYOO Mecanum x1 – Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 y ruedas derechas x2) – Placa OSOYOO Mega2560 totalmente compatible con Arduino UNO/Mega2560 x1 – Escudo OSOYOO Uart Wifi x1 – Placa de controladora OSOYOO modelo Y x1 – Medidor de voltaje OSOYOO x1 – Módulo OSOYOO Bluetooth x1 – Caja de batería OSOYOO x1 – Cable de puente OSOYOO hembra a hembra de 3 pines x1 – Cable de puente OSOYOO macho a hembra de 6 pines x2 – Cable de puente OSOYOO macho a hembra de 10 pines x1 – Cable de puente OSOYOO hembra a hembra 2 pines XH.25 x1 – Baterías 18650 (3.7V) x2 – Cargador de batería x1
Paso 1: debe completar la Lección 1 (ensamblar el robot) antes de continuar con esta lección.
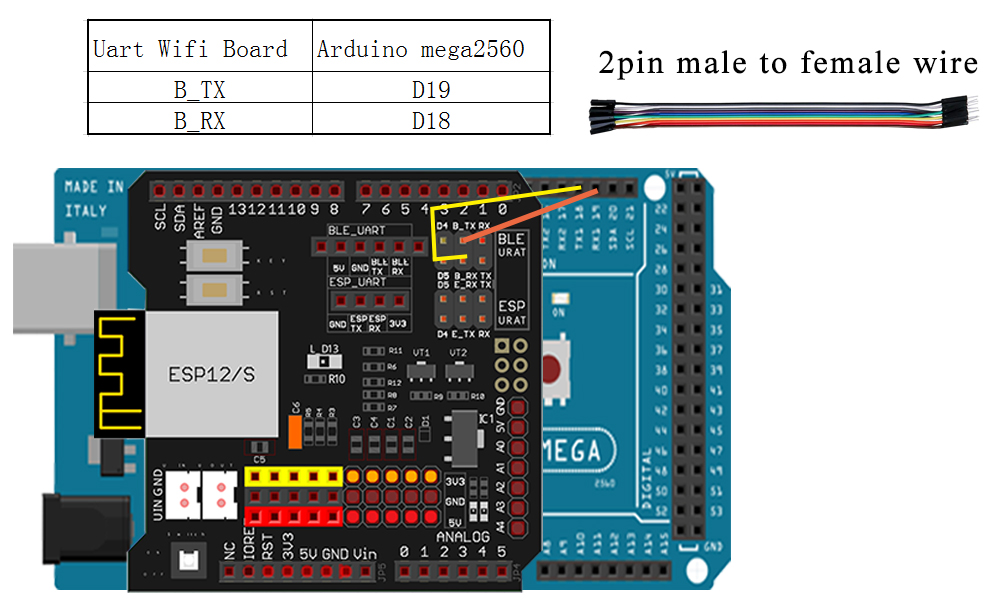
Paso 2: conecte los puertos Bluetooth TX/RX a D19 y D18 con los cables puente. (Nota: necesita dividir 2 piezas de cables puente de macho a hembra de nuestro paquete de cables puente de 10 piezas. Cualquier color del paquete estará bien. El resto de los cables de 8 piezas son piezas de repuesto para posibles cables rotos o dañados.)
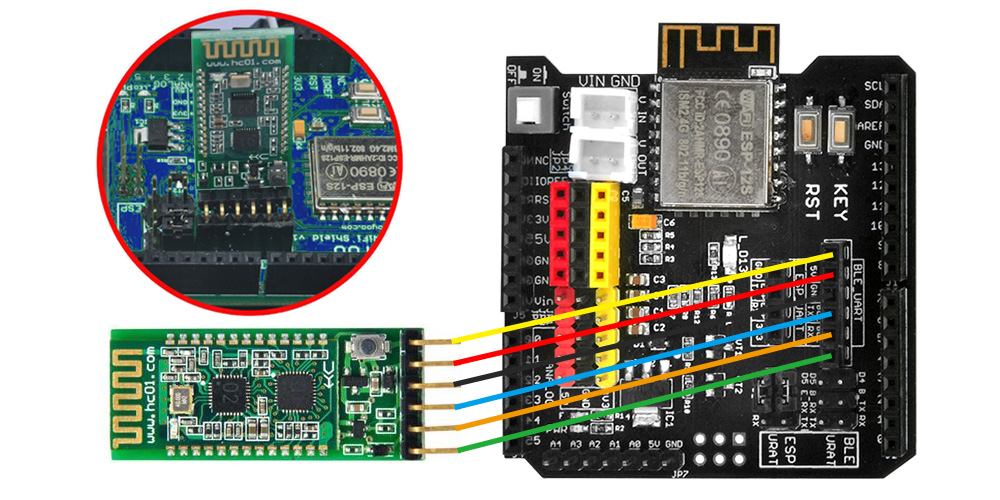
Paso 3: El módulo Bluetooth debe insertarse en la ranura Bluetooth de 6 pines en la placa OSOYOO Wifi.
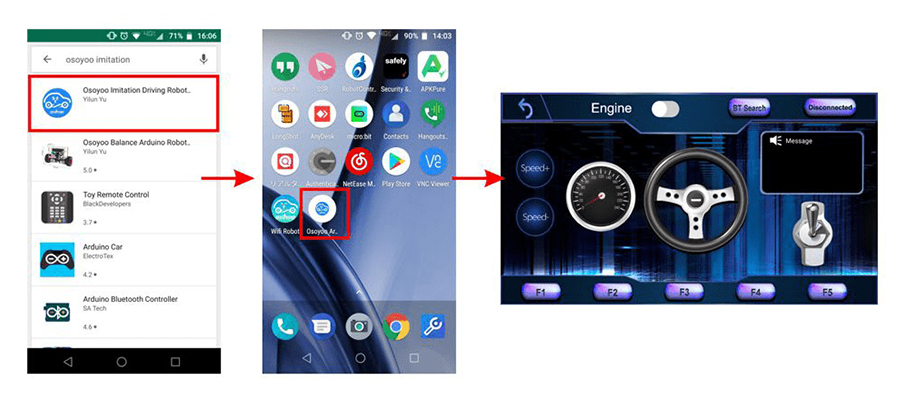
Paso 4: Aplicación móvil: Vaya a su tienda de aplicaciones Google Play ó Apple y busque el nombre de la Aplicación “Conducción por imitación de OSOYOO”, descargue la app de la siguiente manera e instálela en su teléfono inteligente.
Conecte el Bluetooth HC-02 en el teléfono Android. Hay un botón de búsqueda de BT en la aplicación de Android: cuando haga clic en este botón, verá una lista de dispositivos Bluetooth que se han emparejado con su aplicación. Seleccione el dispositivo HC-02 para conectar el Robot. Una vez que el HC-02 esté conectado, el estado de Bluetooth cambiará de Desconectar a Conectar. Sólo puede controlar su Auto Robot cuando el Bluetooth está conectado.
Conecte HC-02 bluetooth en iPhone/iPad, simplemente haga clic en el botón Conectar , aparecerá un dispositivo HC-02 en una lista emergente. Haga clic en ese dispositivo HC-02 para conectar el módulo Bluetooth a su iPhone. Luego, el botón Conectar cambiará de nombre a Desconectar .
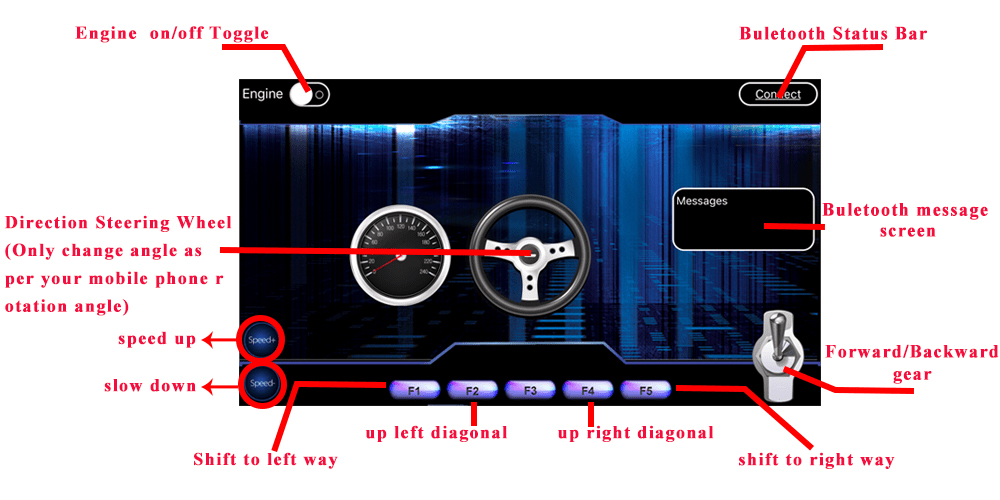
Alternancia del motor: cuando la alternancia del motor está en APAGADO (blanco), el automóvil se detendrá y todos los botones de la aplicación se desactivarán. Cuando la palanca del motor está en ON (rojo), el Robot comenzará a moverse. Todos los demás botones de control de movimiento estarán activos.
Interruptor de marcha adelante/atrás: este interruptor de marcha puede controlar que el Robot se mueva hacia adelante o hacia atrás como la marcha real del automóvil.
Botón personalizado F1,F2,F3,F4,F5. En esta lección, sólo usamos F3 que pausa el movimiento del Robot. La diferencia entre F3 y el botón Engine OFF es que cuando se toca el botón Engine OFF, todos los demás botones se desactivarán. Debe alternar el botón Motor nuevamente para habilitar otro botón. Por otro lado, cuando se hace clic en F3, el Robot se detendrá pero todos los demás botones seguirán activos. Presione F1 para cambiar hacia la izquierda, F2 hacia arriba en diagonal izquierda, F3 para hacer una pausa, F4 hacia arriba en diagonal derecha, F5 para cambiar hacia la derecha.
Volante de dirección: cuando gira el ángulo de su teléfono móvil, el volante cambiará de ángulo según el ángulo de rotación de su teléfono móvil. Esto hará que su Robot cambie de dirección. Por ejemplo, cuando el volante gira en el sentido de las agujas del reloj, el Robot se moverá hacia la izquierda. Recuerde, el volante y el instrumento de avance/retroceso deben funcionar juntos como si estuviera conduciendo un automóvil real. Por ejemplo, cuando desee llevar su Robot de regreso a un estacionamiento del lado derecho, debe configurar en la posición R y girar la dirección en sentido contrario a las agujas del reloj.
Velocidad+ : hace que el Robot acelere.
Velocidad- : hace que el robot disminuya la velocidad.
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descargue Arduino IDE desde https://www.arduino.cc/en/Main/Software?setlang=en, y luego instale el software.
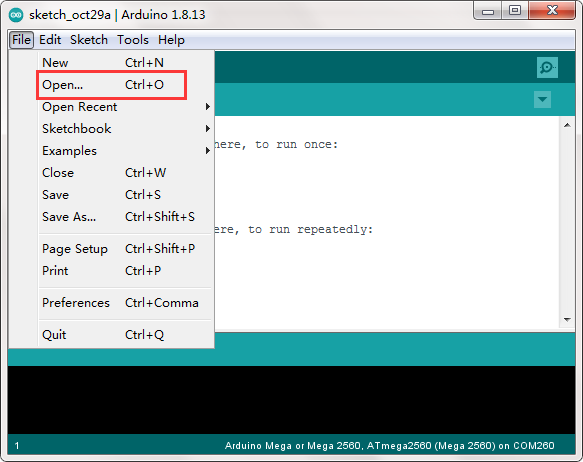
Paso 3: conecte la placa Mega2560 a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código “lesson5.ino” en la carpeta Lesson5, y cargue el código en Arduino.
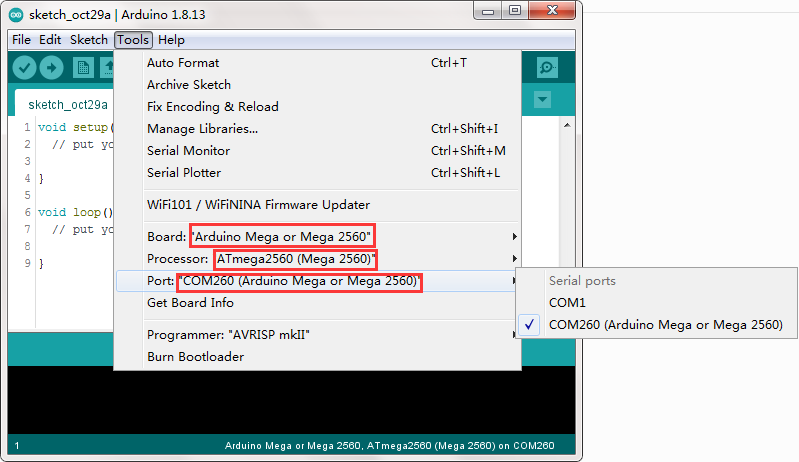
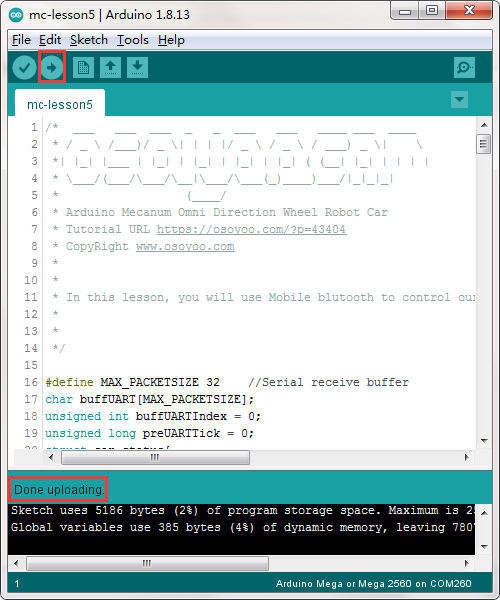
Paso 4: elija la placa/puerto correspondiente para su proyecto y cargue el código en la placa.
Ahora que ha instalado su hardware y software para esta lección, ¡conduzcamos nuestro Robot!
Paso 1) Coloque su Auto Robot en el suelo y encienda el interruptor.
Paso 2 ) Vaya a su teléfono móvil -> Configuración -> Configuración de Bluetooth y busque un dispositivo Bluetooth llamado HC-02 y conéctelo con el código 1234.
Conectarse con un dispositivo Android: si usa un dispositivo Android y no ha emparejado el módulo Bluetooth con su teléfono celular, primero empareje el módulo Bluetooth antes de abrir la Aplicación. En la Configuración de su teléfono celular -> Bluetooth, busque un dispositivo Bluetooth llamado HC02, vincúlelo con la contraseña 1234. Después de emparejar el dispositivo Bluetooth HC02, abra la Aplicación. Haga clic en el botón de búsqueda de BT para conectar la aplicación al dispositivo HC02.
Conectarse con un dispositivo iOS: si usa un dispositivo iOS, simplemente abra la Aplicación, haga clic en el botón Conectar, verá una lista de Bluetooth, seleccione el dispositivo HC02.
Paso 3 ) Abre la aplicación del robot de conducción por imitación OSOYOO, haz clic en el botón de búsqueda de BT y encuentre el Bluetooth que has emparejado.
Paso 4) Encienda la palanca del motor, haga clic en Speed+ para hacer que el robot acelere ya que el Robot es muy lento al principio. Cuando gira el ángulo de su teléfono móvil, su automóvil cambiará de dirección.
Paso 5) Haga clic en el botón del instrumento para cambiar a la dirección hacia adelante o hacia atrás.
Paso 6) Presione F1 para cambiar a la izquierda, F5 para cambiar a la derecha, F2 para arriba en diagonal izquierda, F4 para arriba en diagonal derecha y F3 para hacer una pausa.
Ajuste de la velocidad del motor para un mejor rendimiento
Para obtener un mejor resultado del rendimiento de funcionamiento, el valor de potencia (velocidad) del motor debe ajustarse correctamente según el nivel de la batería. Si el valor de la potencia (velocidad) del motor es demasiado alto, su automóvil podría funcionar demasiado rápido y fácilmente fuera de control. Si la potencia del motor (velocidad) es demasiado baja, es posible que el robot ni siquiera se mueva.
Para ajustar el valor de la potencia del motor, debe cambiar las 4 constantes de las líneas 27, 28, 29 y 30 en el archivo del código mecanum-2560-lesson4.ino:
MIN_SPEED es la potencia mínima necesaria para arrancar el Robot. Si cuando el interruptor del motor de la aplicación se cambia a ROJO, pero su automóvil no se mueve, debe aumentar este valor; si el robot funciona demasiado rápido en el momento del arranque del motor, debe reducir este valor.
Los valores TURN_SPEED y SLOW_TURN_SPEED determinan las velocidad de giro de su Robot. Si su Robot gira demasiado rápido, necesita reducir estos dos valores, si gira demasiado lento o no gira, aumente estos dos valores. Siempre haga SLOW_TURN_SPEED alrededor de 20 a 30 por debajo del valor TURN_SPEED.
El valor BACK_SPEED determina la velocidad de marcha atrás inversa.
Después de que las baterías se estén agotando, es posible que deba aumentar el valor de estas 3 constantes. Puede agregar o reducir gradualmente 10 cada vez en estos valores y comparar qué valores tienen el mejor rendimiento de seguimiento.