En esta lección, instalaremos sensores de distancia IR de 2 piezas en el Auto Robot y programaremos el Robot para seguir los movimientos de los objetos. El Auto Robot recibe la señal de los sensores de distancia IR y luego el programa conducirá el mismo para tomar medidas. Debe completar la Lección 1 (ensamblar el robot) antes de comenzar esta lección.
Descargar tutoriales en PDF: https://osoyoo.com/manual/2021006600.pdf
Vídeo de instalación del coche robot OSOYOO: https://osoyoo.com/manual/2021006600.html
– Chasis para Ruedas Mecanum OSOYOO de Robot x1 – Ruedas y motores OSOYOO x4 (ruedas izquierdas x2 y ruedas derechas x2) – Placa OSOYOO Mega2560 totalmente compatible con Arduino UNO/Mega2560 x1 – Escudo OSOYOO Uart Wifi x1 – Placa controladora OSOYOO modelo Y x1 – Medidor de voltaje OSOYOO x1 – Sensores de distancia IR OSOYOO x2 – Caja de batería OSOYOO x1 – Cable de puente OSOYOO hembra a hembra de 3 pines x1 – Cable de puente OSOYOO macho a hembra de 6 pines x2 – Cable de puente OSOYOO macho a hembra 10 pines x1 – Cable de puente OSOYOO hembra a hembra 2 pines XH.25 x1 – Baterías 18650 (3,7 V) x2 – Cargador Batería x1
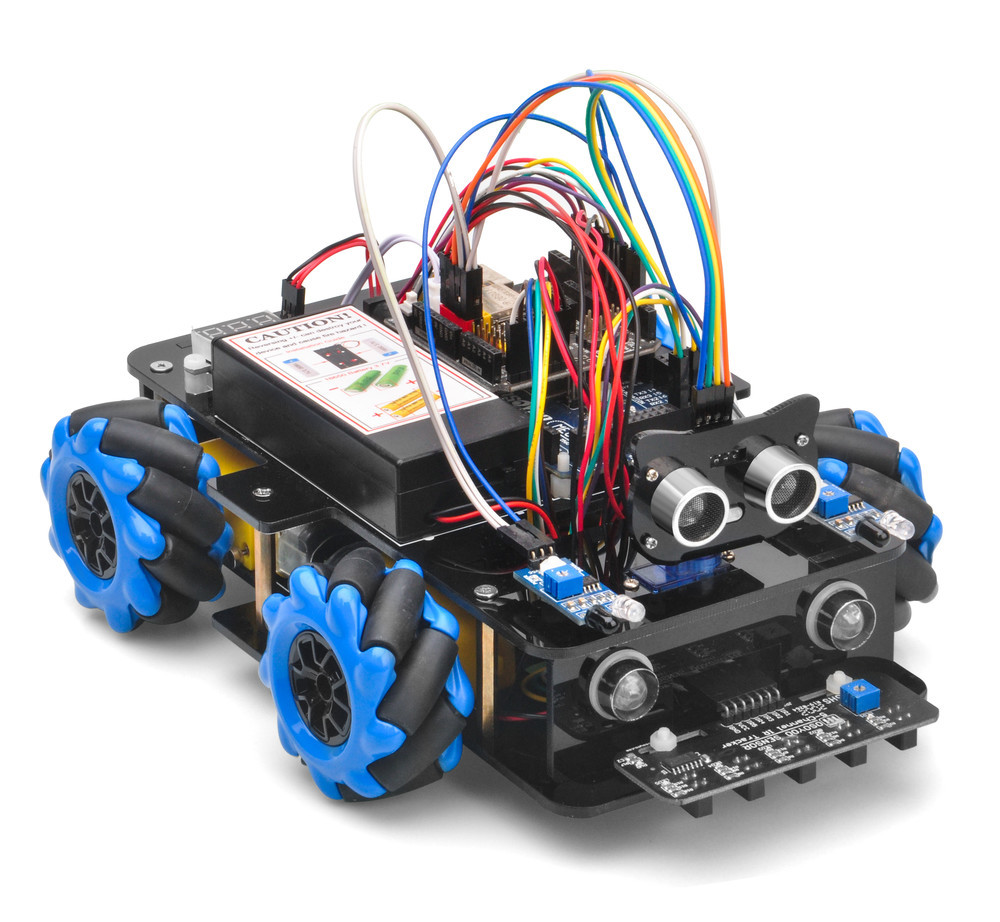
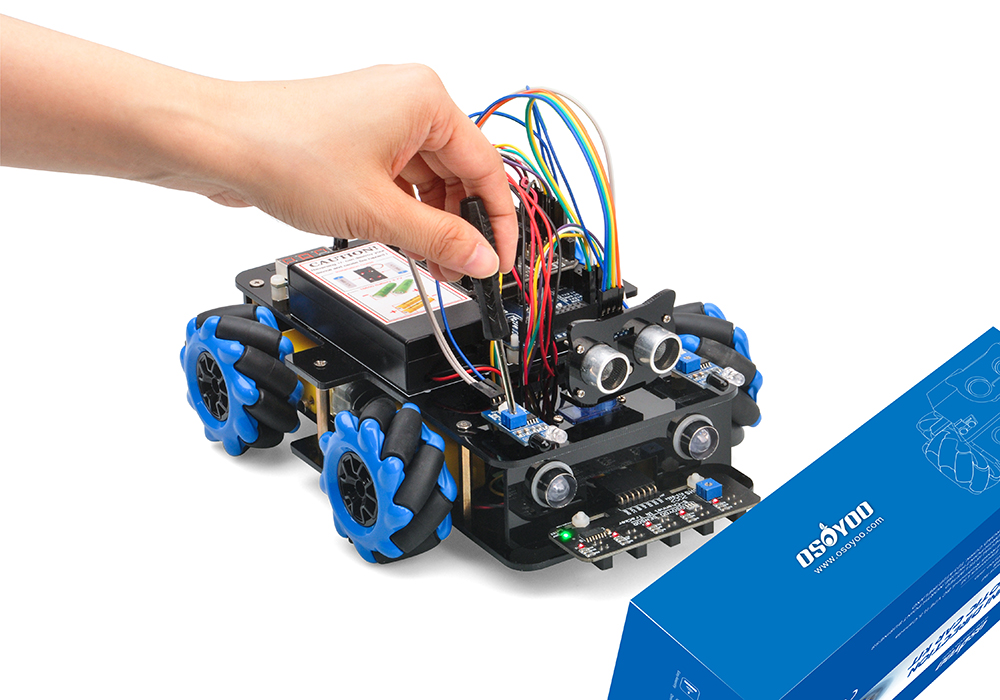
Paso 1: Instale el marco básico del Robot inteligente según la Lección 1. Si ya completó la instalación en la Lección 1, simplemente manténgala como está.
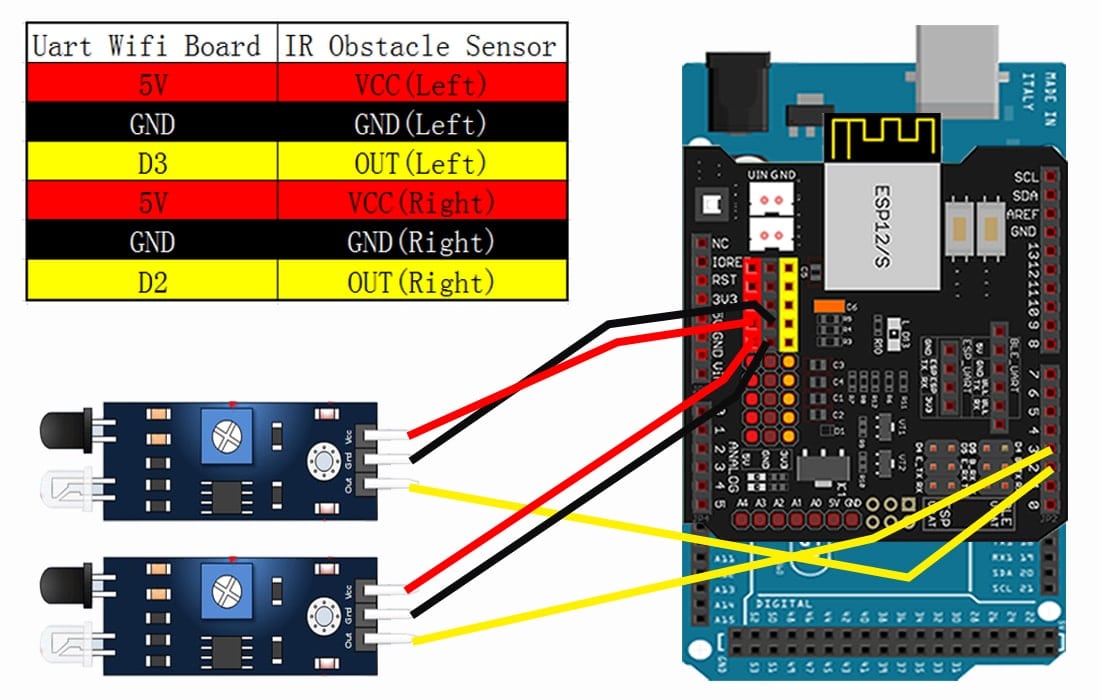
Paso 2: Conecte los 2 módulos de sensores de distancia IR como se muestra a continuación en el diagrama de conexión. (Recuerde: NO retire ningún cable existente instalado en la Lección 1).
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descargue el IDE Arduino desde https://www.arduino.cc/en/Main/Software?setlang=en, luego instale el software.
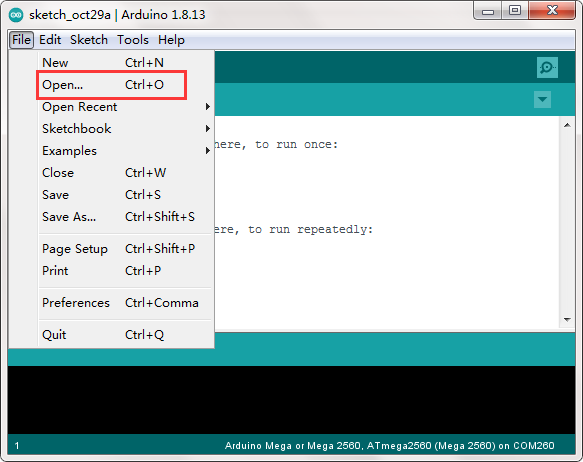
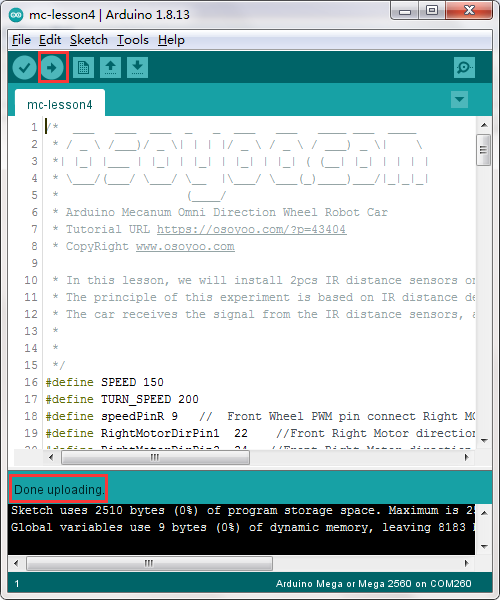
Paso 3: Conecte la placa Mega2560 a la PC con un cable USB, abra el IDE Arduino -> haga clic en archivo -> haga clic en Abrir -> elija el código “lesson4.ino” en la carpeta Lesson4, cargue el código en Arduino.
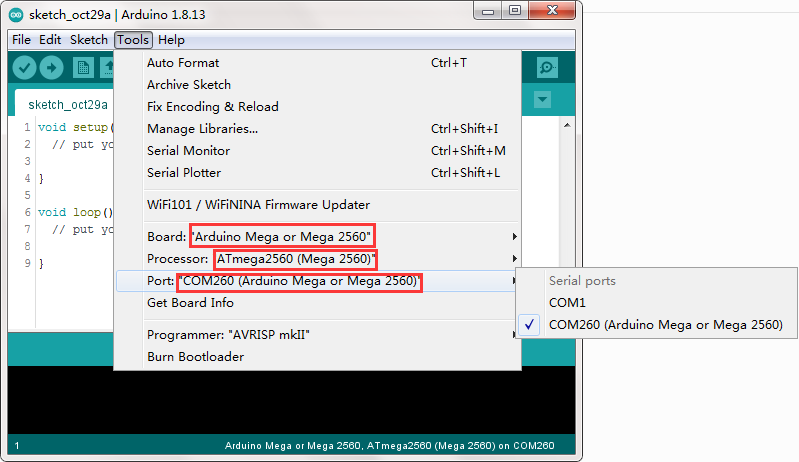
Paso 4: Elija la placa/puerto correspondiente para su proyecto, cargue el boceto en la placa.
Paso 5: Encienda el robot, coloque el objeto unos 10 cm por delante de cada sensor de distancia IR y ajuste el potenciómetro en los sensores de distancia IR para detectar el objeto o su mano.
Nota: Cuando estos módulos IR detectan objetos, tanto el indicador de encendido como el indicador de señal están encendidos. Cuando no se detecta ningún objeto, solo el indicador de encendido está prendido, el indicador de señal está apagado. Si el indicador de señal está siempre encendido aunque no haya ningún obstáculo frente al sensor, debe ajustar el potenciómetro.
Encienda el robot, coloque su mano delante del automóvil, luego el automóvil se moverá hacia su mano como si lo tomara. Avanza cuando ambos módulos IR para evitar obstáculos detectan su mano; gira a la derecha si solo el módulo de evasión de obstáculos IR derecho detecta un objeto; gira a la izquierda si solo el sensor de distancia IR izquierdo detecta un objeto. cuando su mano esté a más de 10 cm por delante, se detendrá.
yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.











yes. all the 6 example lessons related to this V2.0 Mecanum car use the same parts in the package box. No need buy extra parts. But you might need to change some wire connection. Please read the tutorial carefully.