| Comprar desde US |
Comprar desde UK |
Comprar desde DE |
Comprar desde IT |
Comprar desde FR |
Comprar desde ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

Los bloques de construcción de OSOYOO son compatibles mecánicamente con los bloques de construcción líderes del mercado. En esta lección, usaremos los bloques de OSOYOO para construir un robot cangrejo que pueda usar sus ojos (sensor ultrasónico) para detectar objetos y usar sus pinzas (servo de dedos) para atrapar un objeto.. (Nota: Los siguientes modelos de construcción son solo de referencia y están sujetos a la construcción real.)

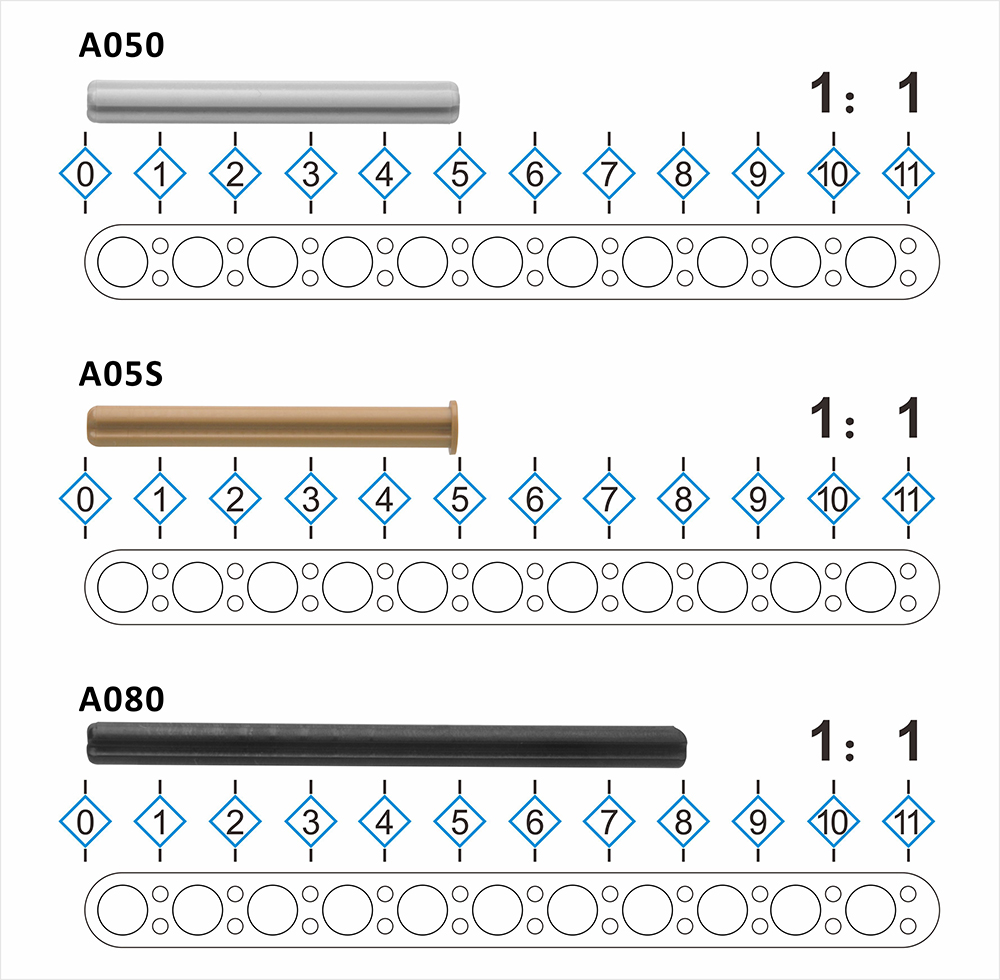
Por favor, prepare las siguientes partes para completar este proyecto
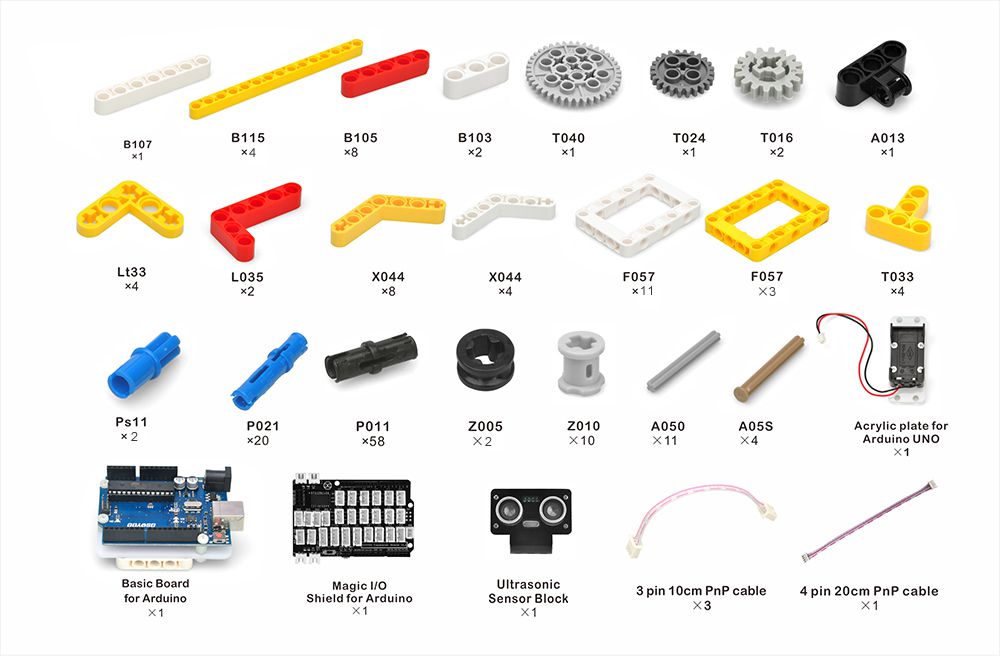
Nota: TODOS los productos de OSOYOO para Arduino son placas de terceros totalmente compatibles con Arduino.

Antes de construir un ascensor con bloques, por favor, de acuerdo con la Preparación antes de la clase 2: https://osoyoo.com/2021/12/01/preparation-before-class-2
Nota:
- El color del bloque de construcción está sujeto al producto real, lo que no afecta el uso.
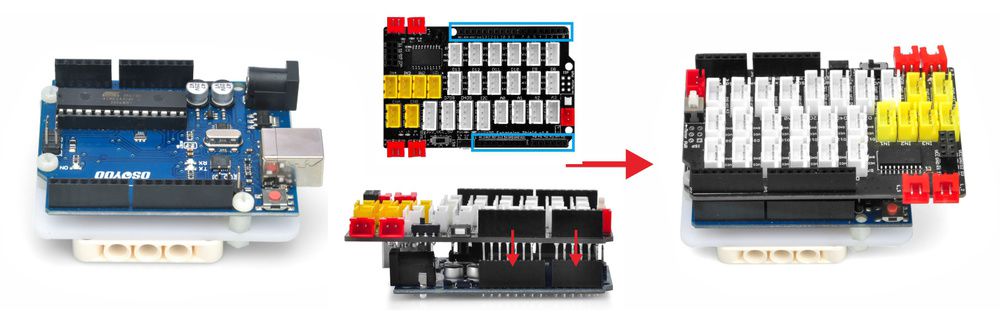
- El color de la placa OSOYOO Magic I/O no afecta la instalación.
.
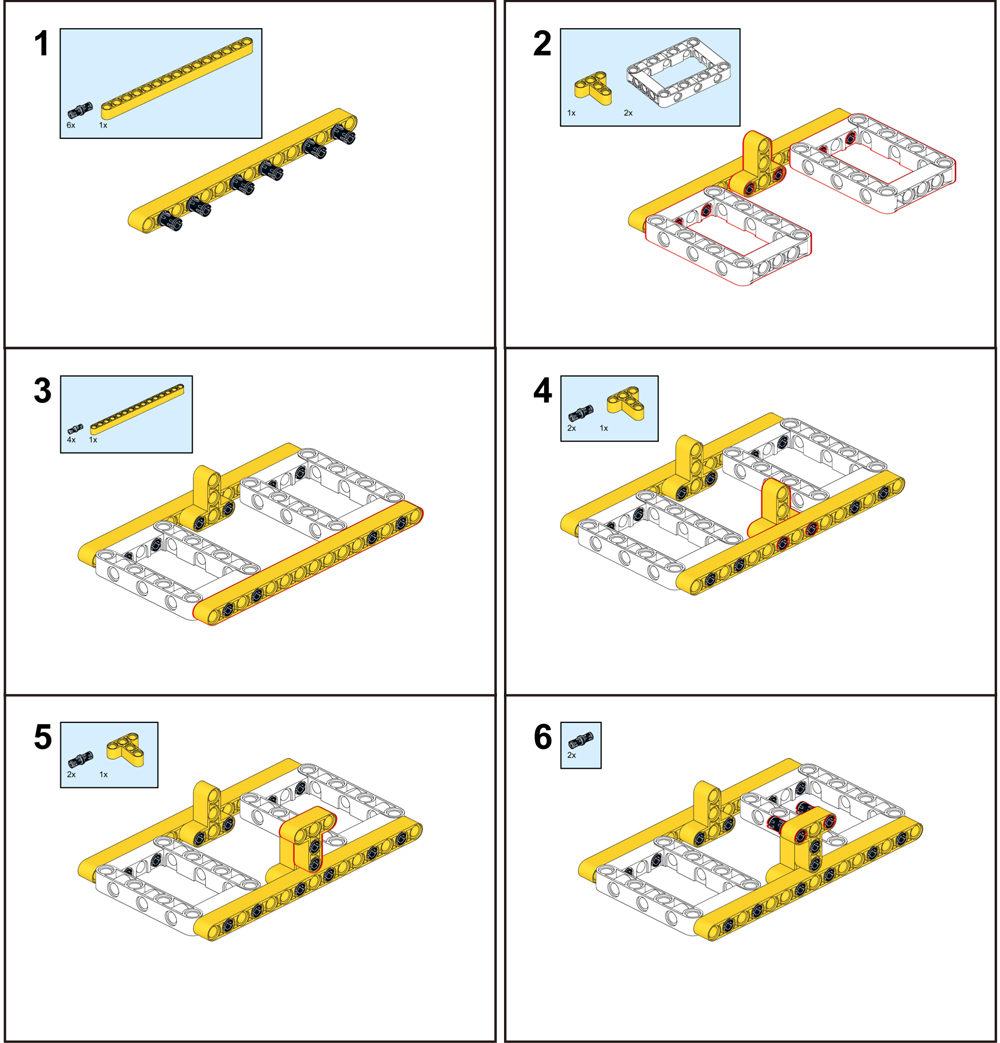
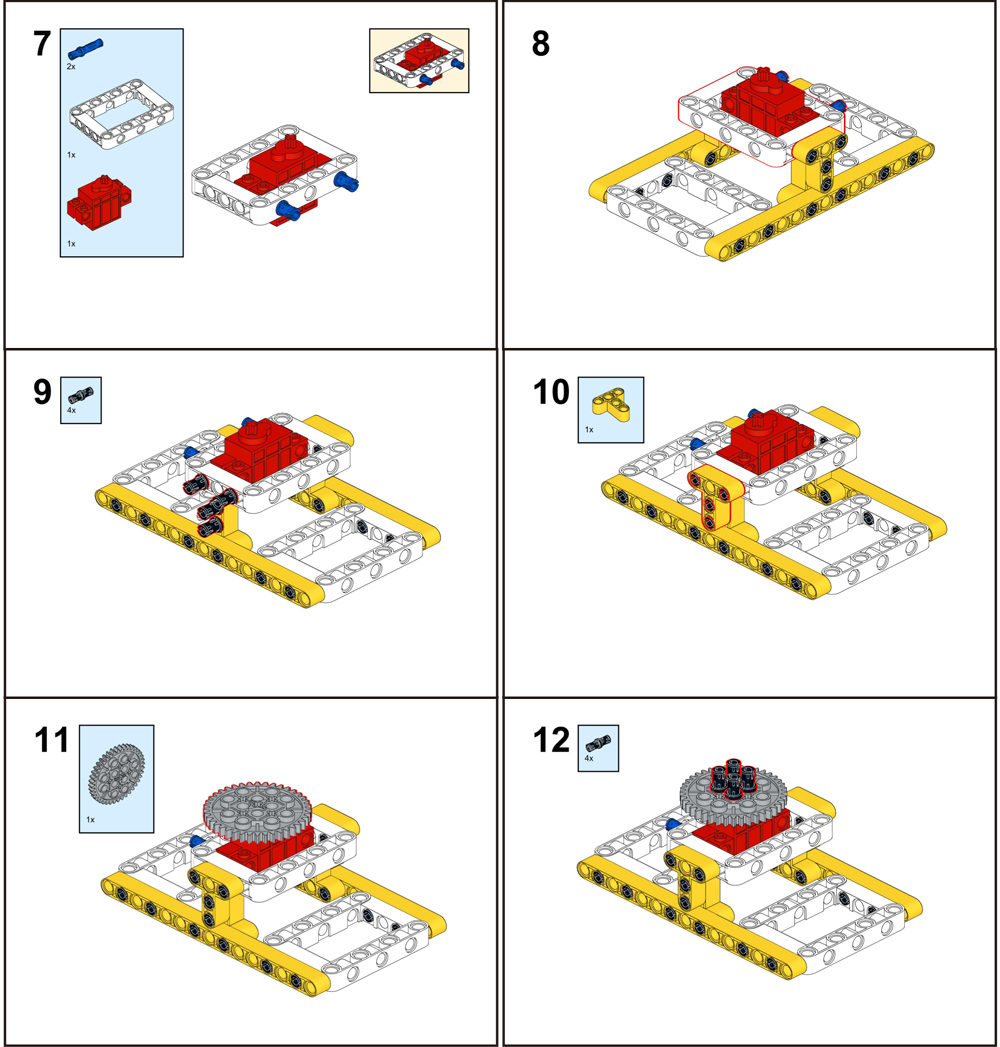
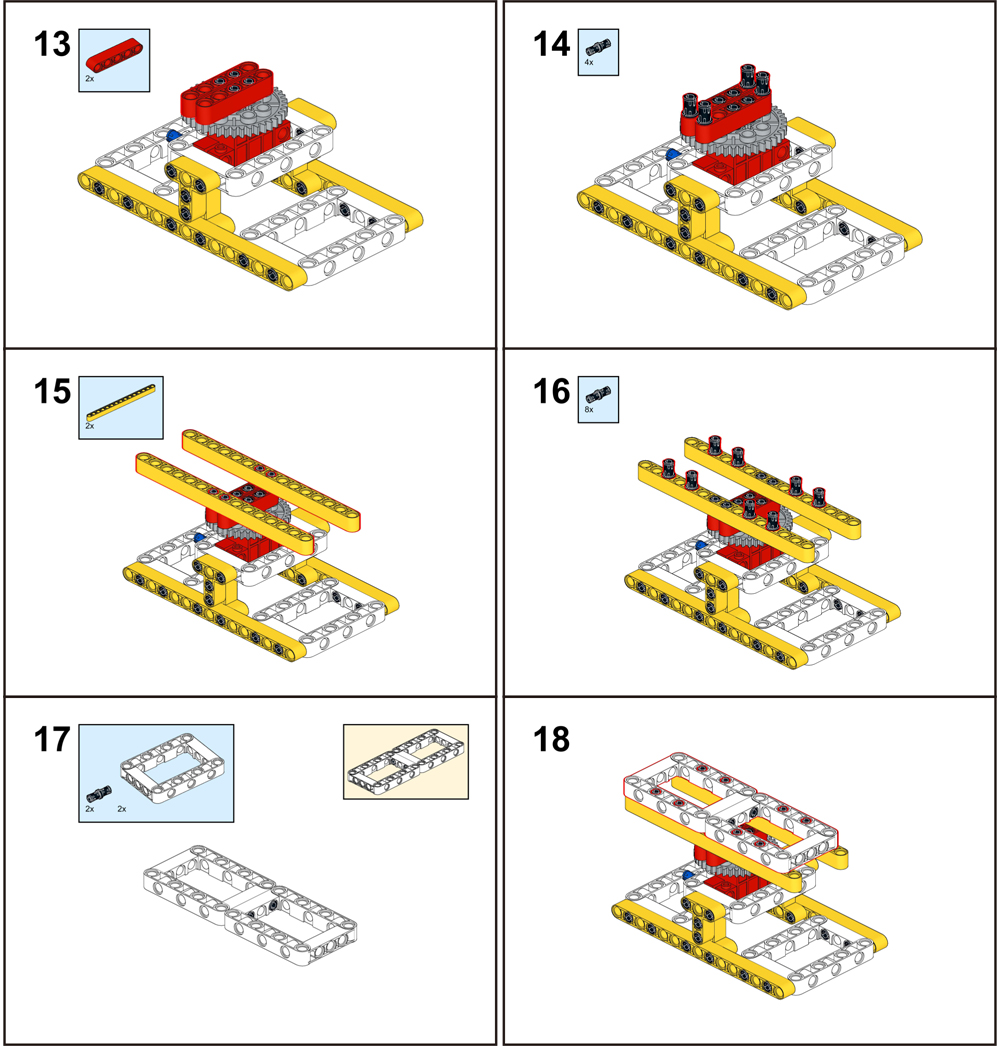
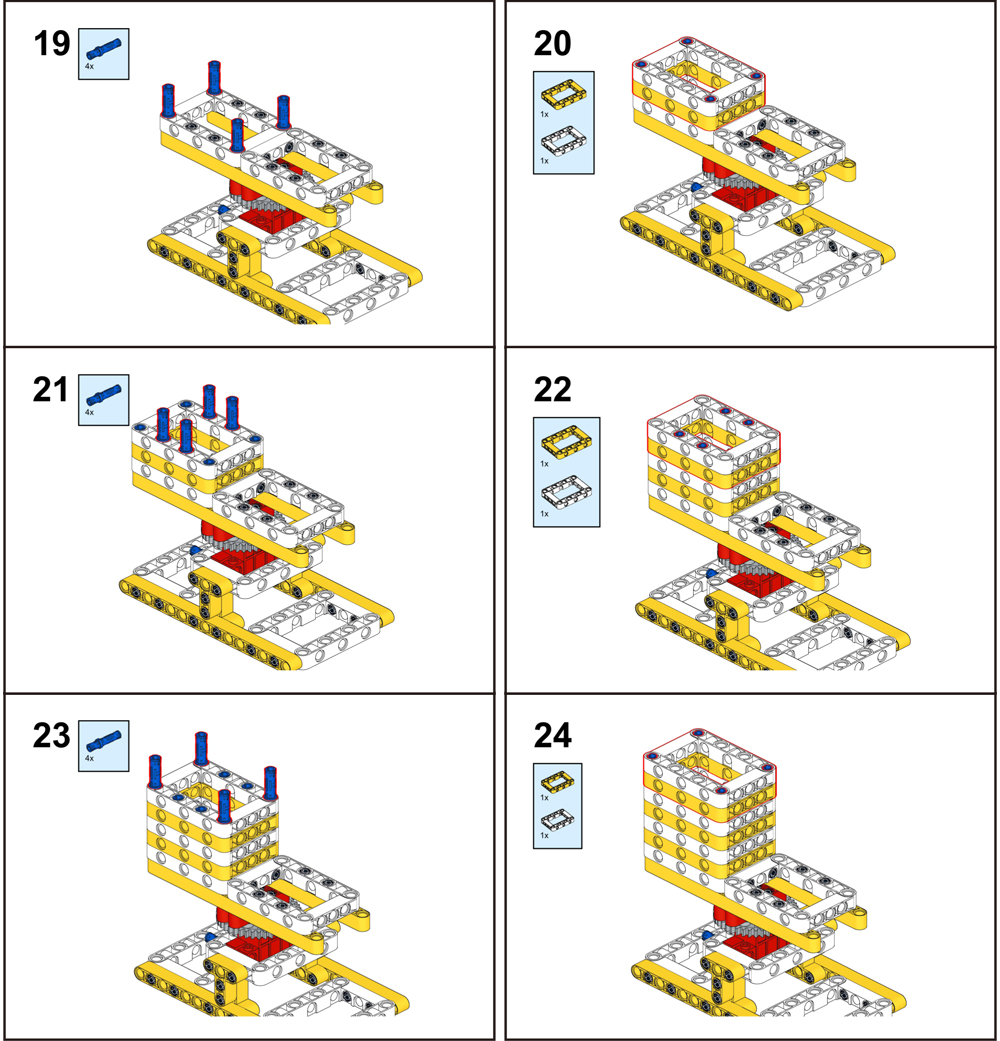
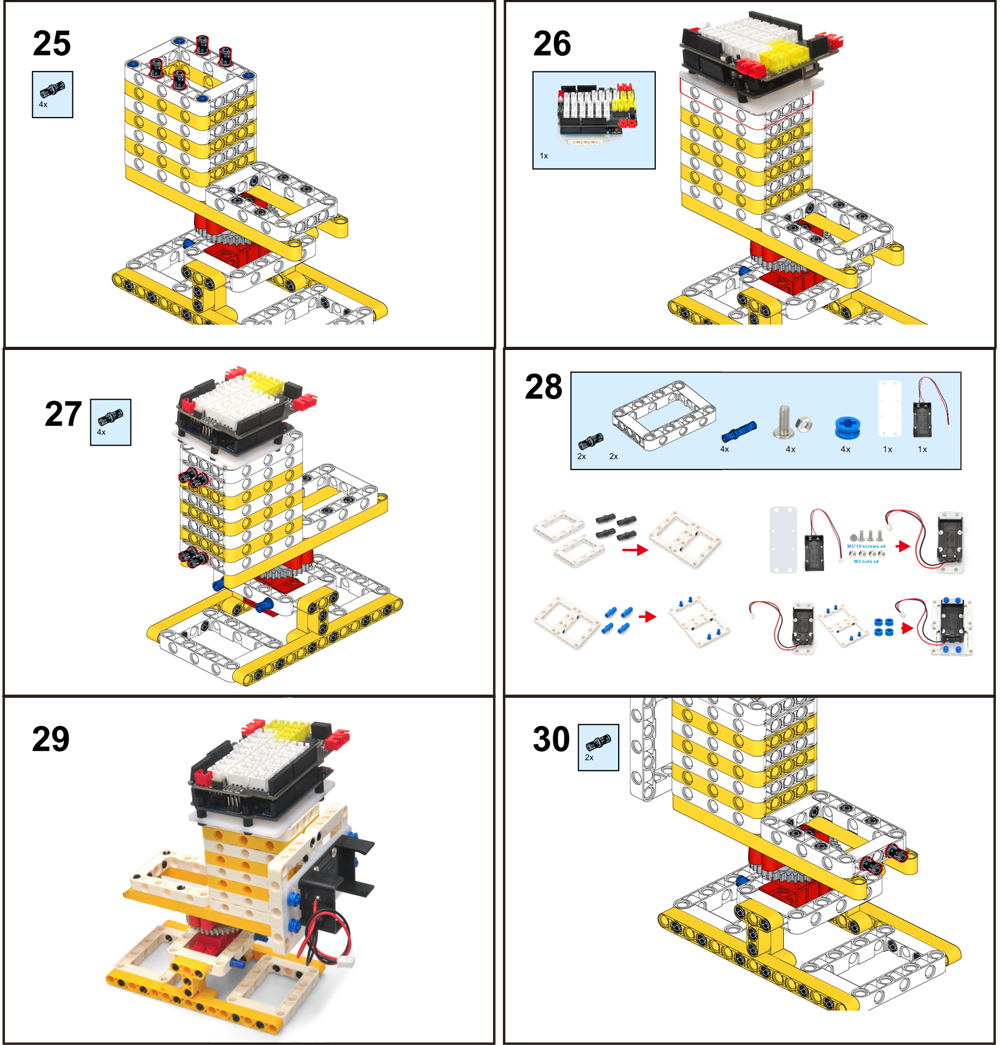
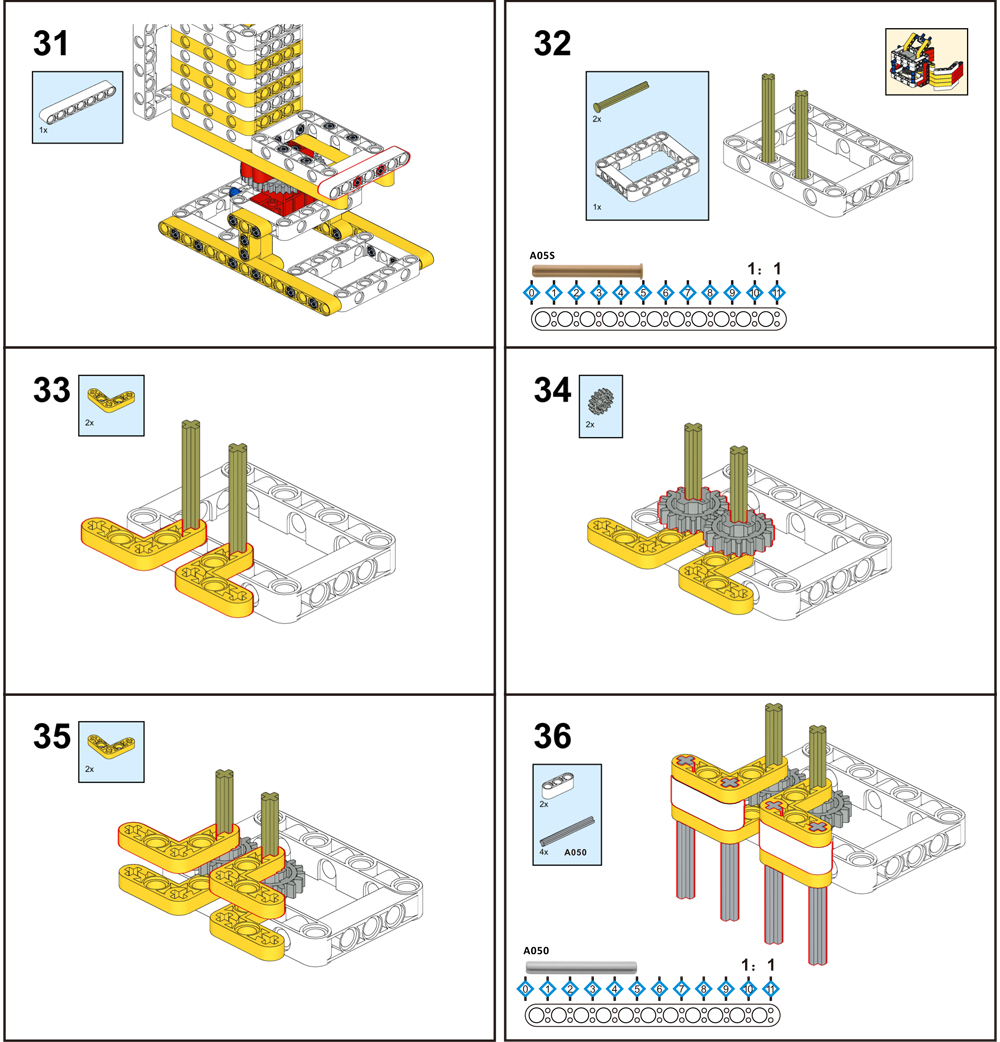
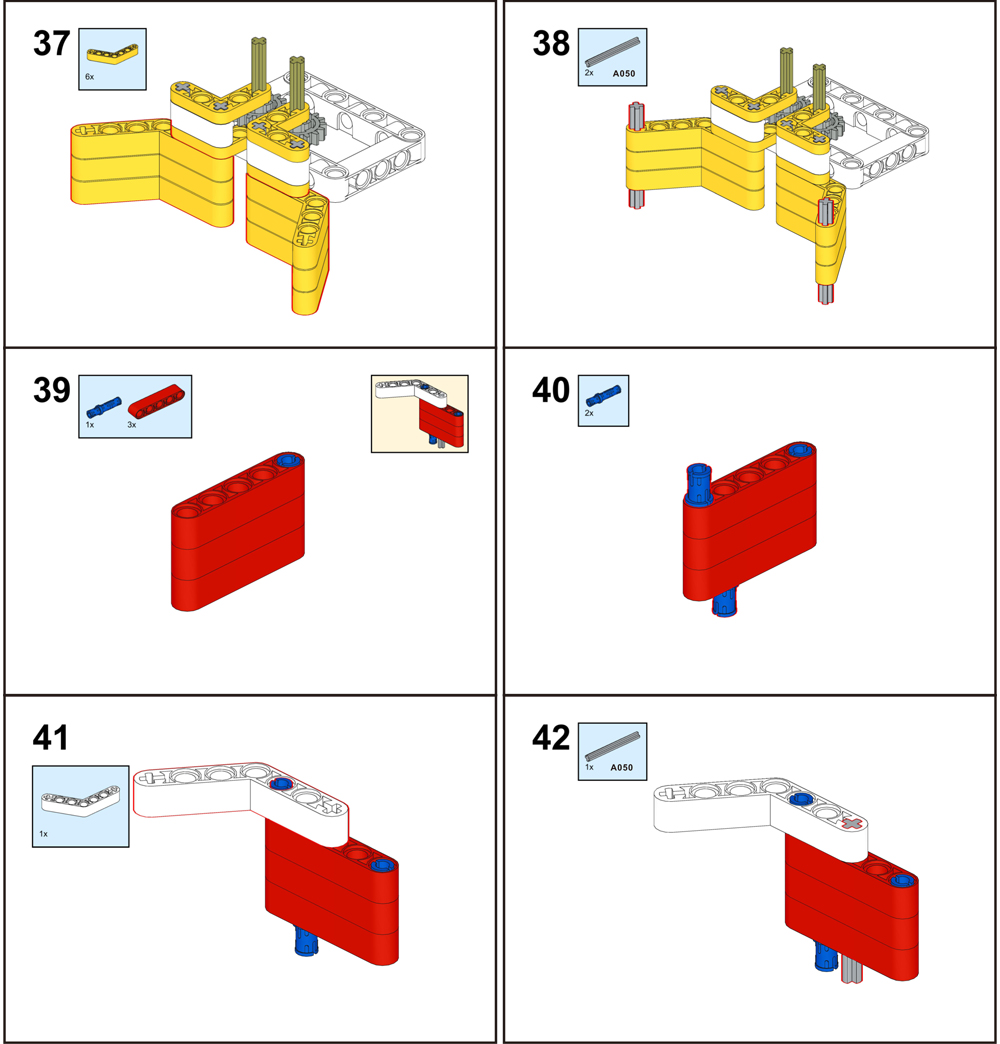
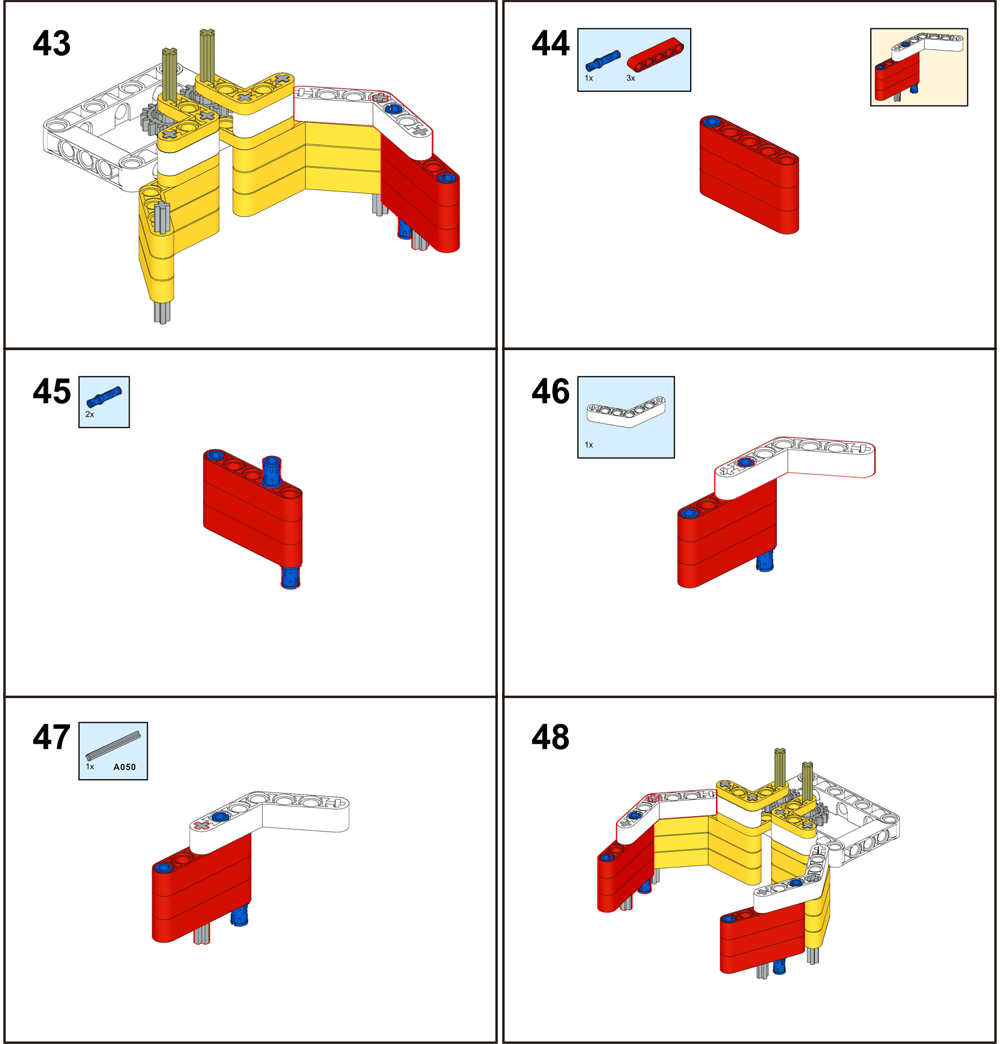
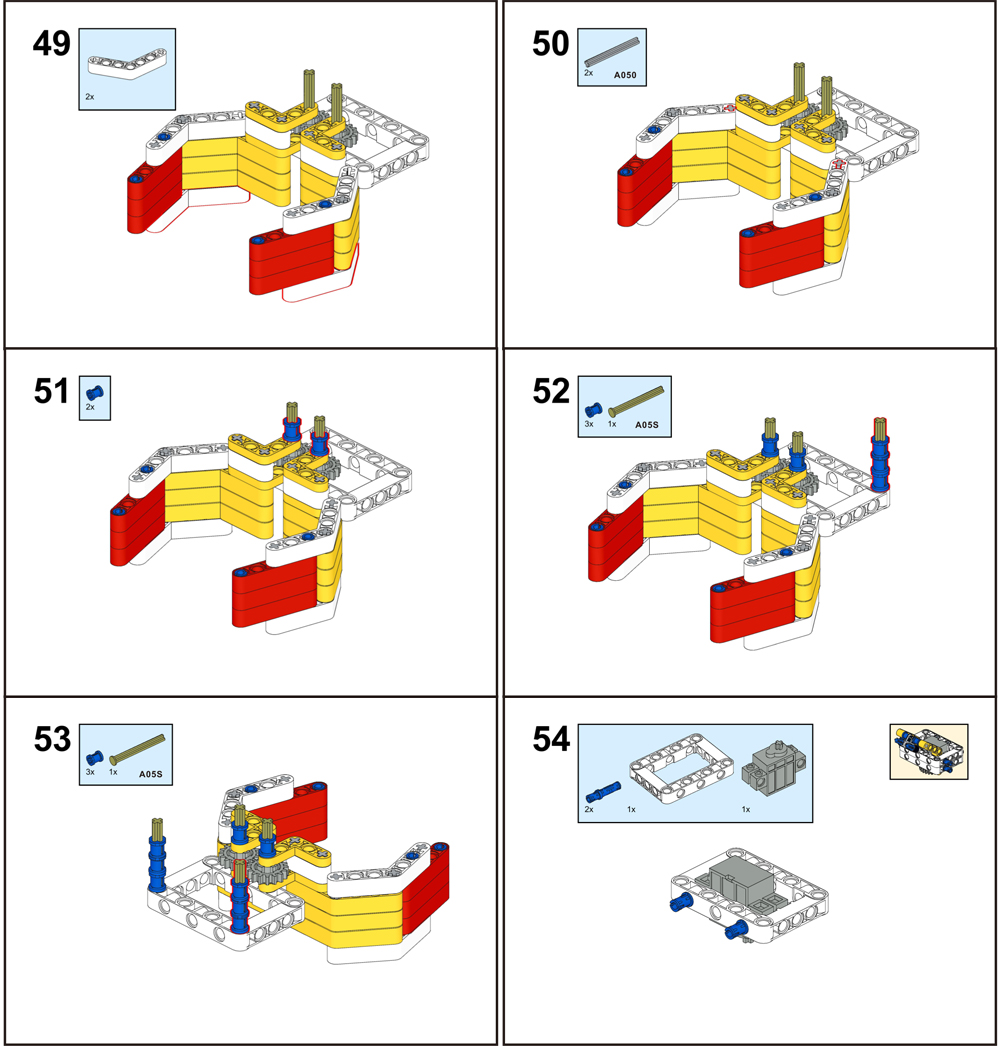
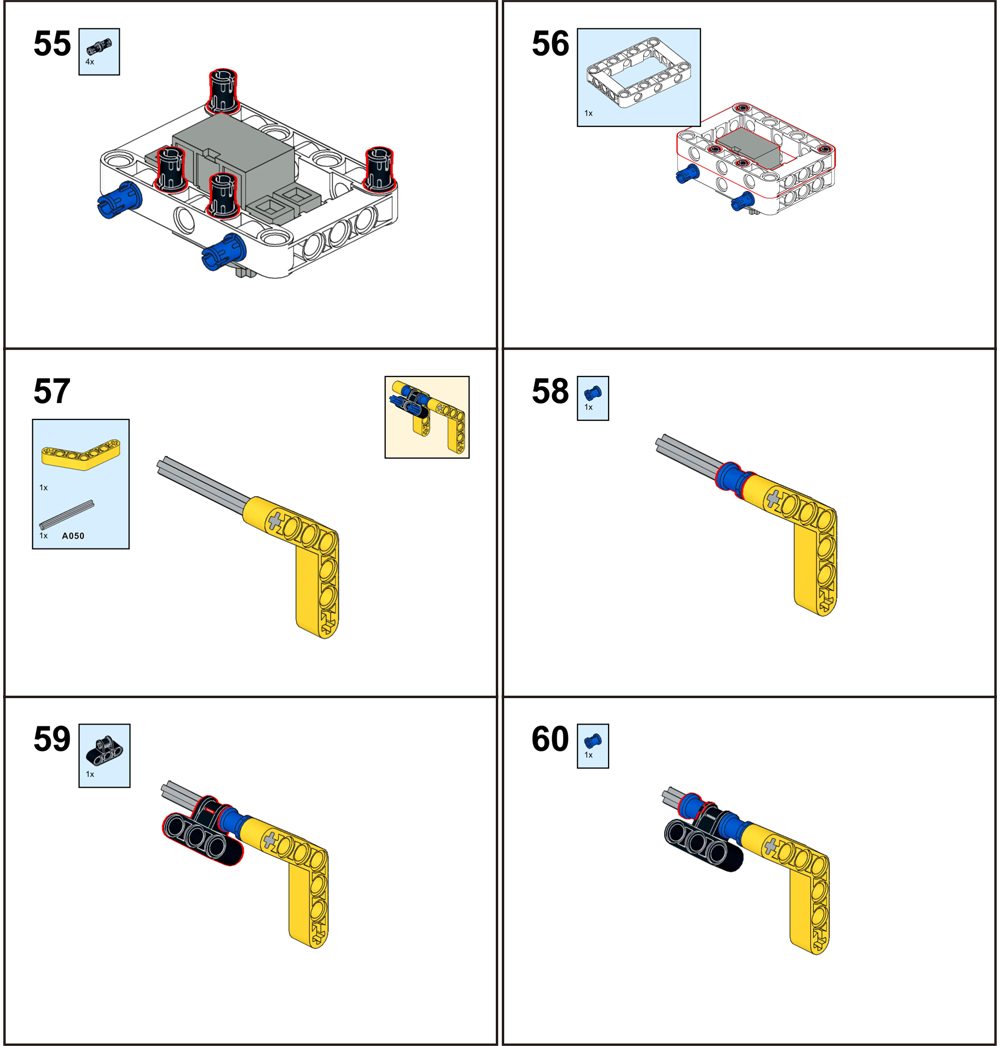
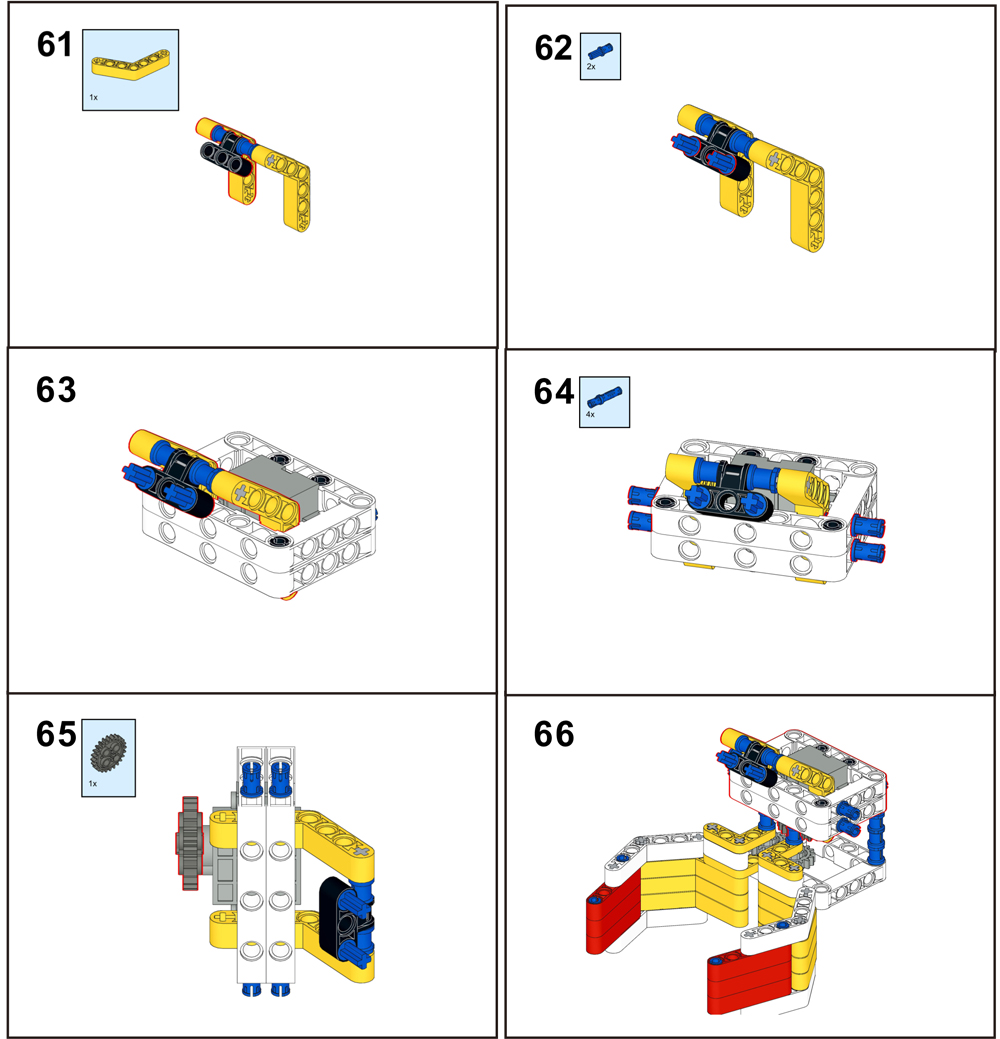
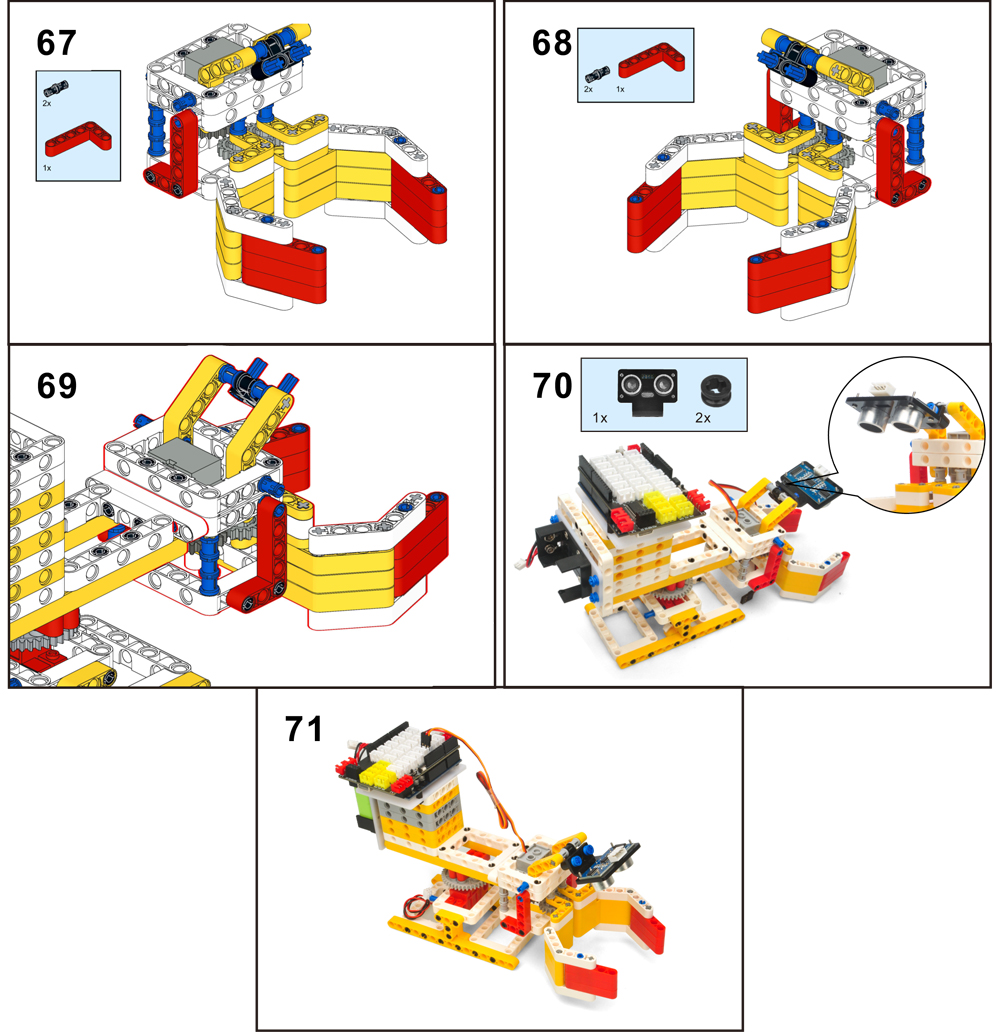
Por favor, siga las instrucciones en el archivo PDF para construir el bloque de construcción: https://osoyoo.com/picture/Block_kit/lesson6/lesson6.pdf

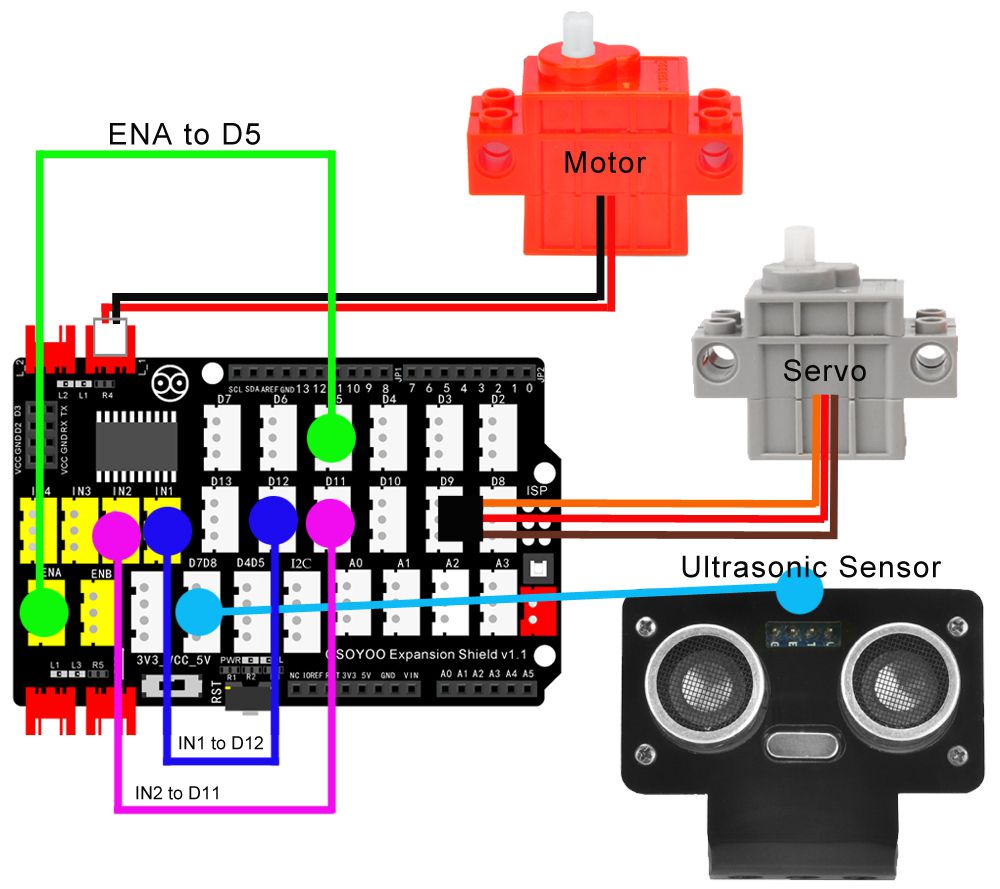
Conecte los cables según la siguiente imagen:
- Motor (Rojo) a L1 o L2
- Servo (Gris) al puerto D9
- Sensor ultrasónico al puerto D7D8
- IN1 to D12
IN2 to D11
ENA to D5

Nota: En este kit, usamos mBlock como herramienta de programación. Si desea aprender más sobre mBlock, por favor visite la preparación antes de la clase 1:
https://osoyoo.com/2021/12/01/preparation-before-class-1
Paso 1) Descargue mBlock PC desde https://mblock.makeblock.com/en-us/download/, seleccione el archivo de descarga según el tipo de sistema operativo de su computadora:

Paso 2) Descargue el archivo del dispositivo OSOYOO UNO.next desde el siguiente enlace: https://osoyoo.com/driver/mblock/osoyoo_uno.mext
Paso 3) Ejecute el software de PC mBlock haciendo doble clic en el icono de la linda panda. Verá la interfaz gráfica de usuario de mBlock como en la siguiente imagen. Por favor elimine el dispositivo predeterminado CyberPi haciendo clic en la cruz en el círculo rojo.

Paso 4) Arrastre y suelte el archivo osoyoo_uno_mext (descargado en el paso 2) al software mBlock como se muestra a continuación:

Ahora verá un nuevo firmware de dispositivo en mBlock, como se muestra en la siguiente imagen:

Ahora el software mBlock y el firmware del dispositivo OSOYOO_UNO se han instalado correctamente en nuestra PC!
Ahora le mostraremos cómo usar bloques para hacer realidad nuestro Robot Cangrejo.
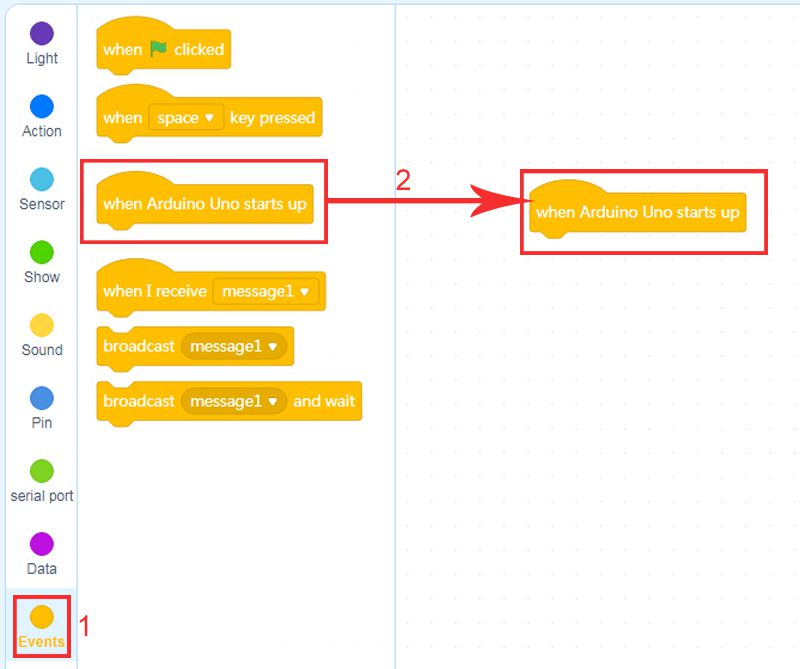
Paso 1: Haga clic en “Events“, agregue el bloque “when Arduino Uno starts up” al área de programación:
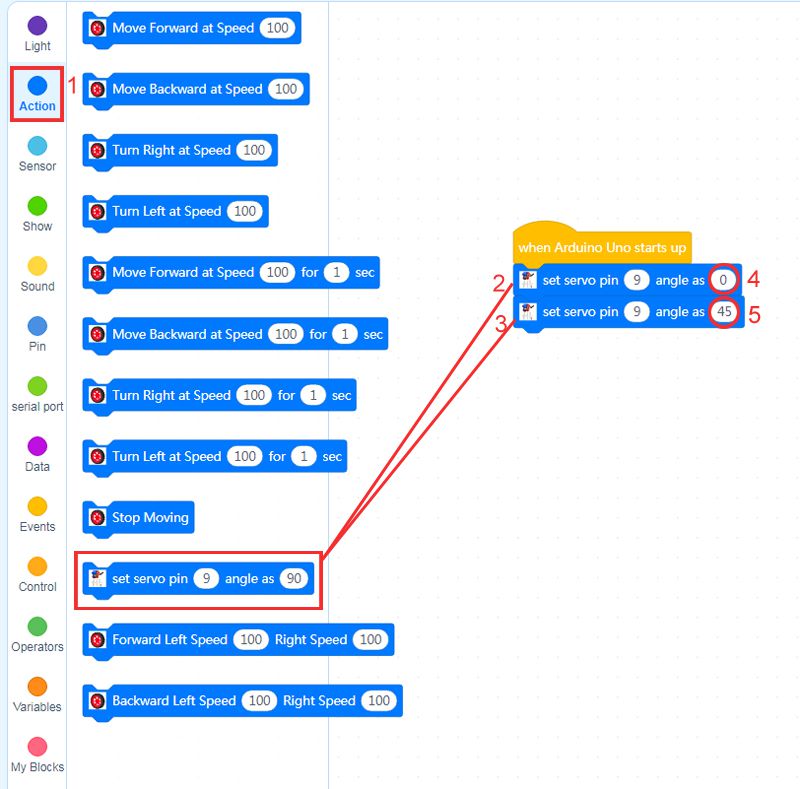
Step 2: Paso 2: Haga clic en “Action“, arrastre el bloque “set servo pin 9 Angle as 0” dos veces y cambie el ángulo a 0 y 45 como se muestra a continuación:
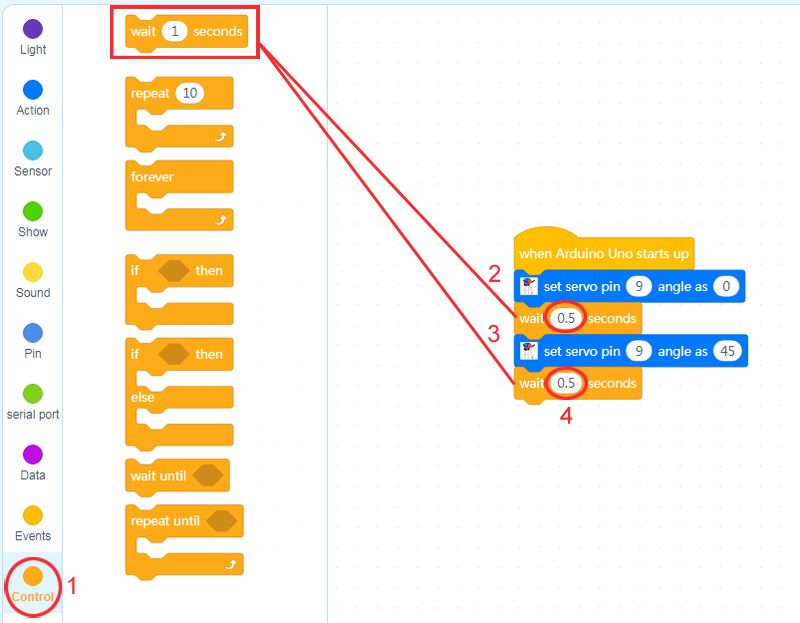
Paso 3: Haga clic en “Control“, arrastre el bloque “wait 1 seconds” dos veces debajo del bloque “set servo pin 9 Angle as 0” y cambie el 1 por 0.5 como se muestra a continuación:
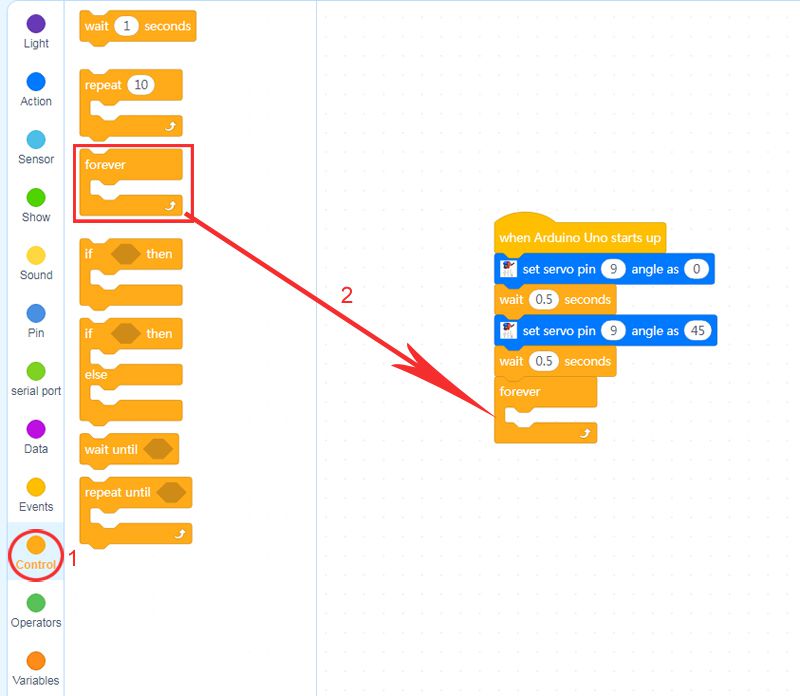
Paso 4: Haga clic en “Control“, luego arrastre y suelte el bloque “Forever” debajo del bloque “wait x seconds” como se muestra a continuación:
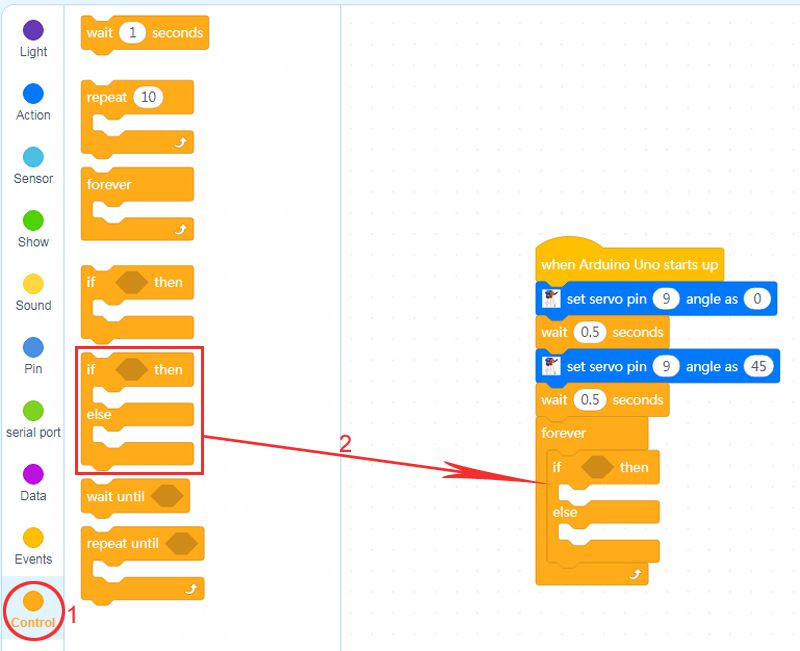
Paso 5: Haga clic en “Control“, arrastre el bloque “if-then-else” al bucle “forever” como se muestra a continuación:
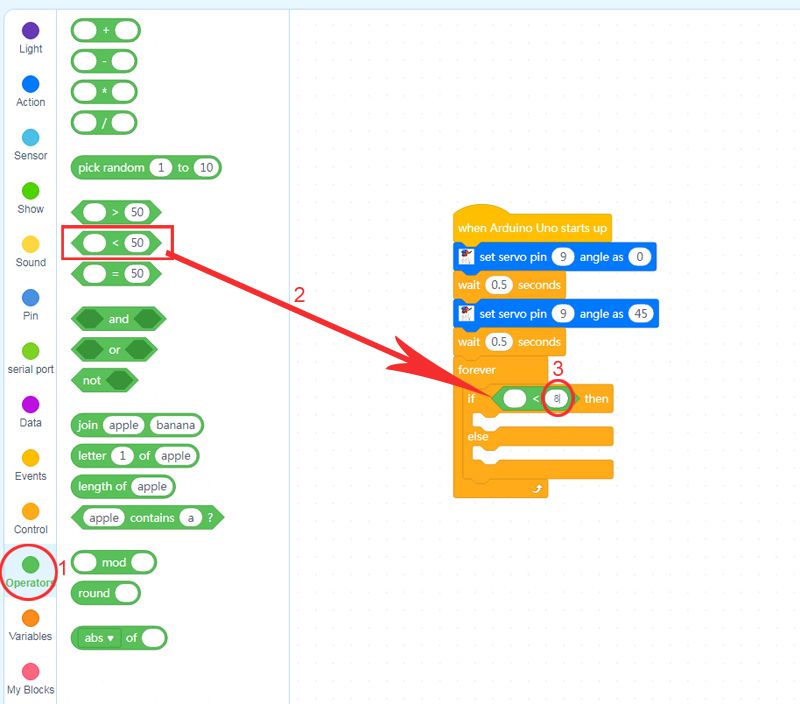
Paso 6: Haga clic en “Operation“, arrastre el bloque “X < 50” a la posición del bloque “if-then-else” y cambie el valor de 50 a 8 como se muestra a continuación:
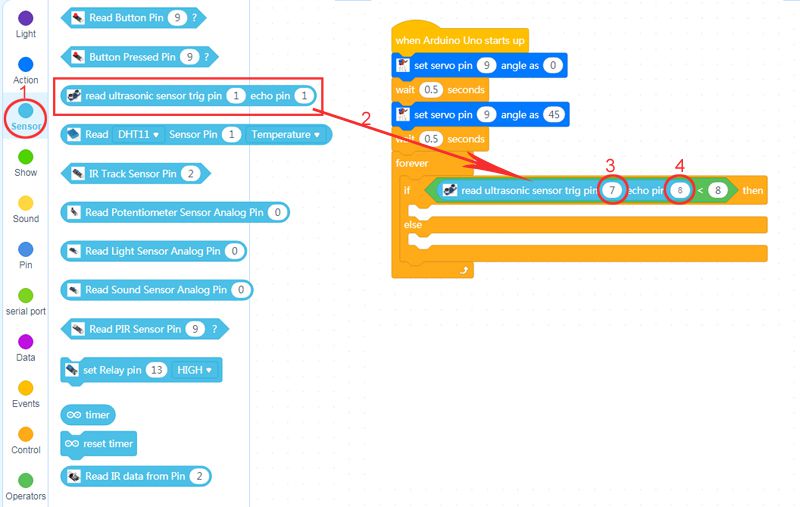
Paso 7: Haga clic en “Sensor“, arrastre el bloque “read ultrasonic sensor trig pin 1 echo pin 1” al primer espacio en blanco del bloque “X < 8” como se muestra a continuación:
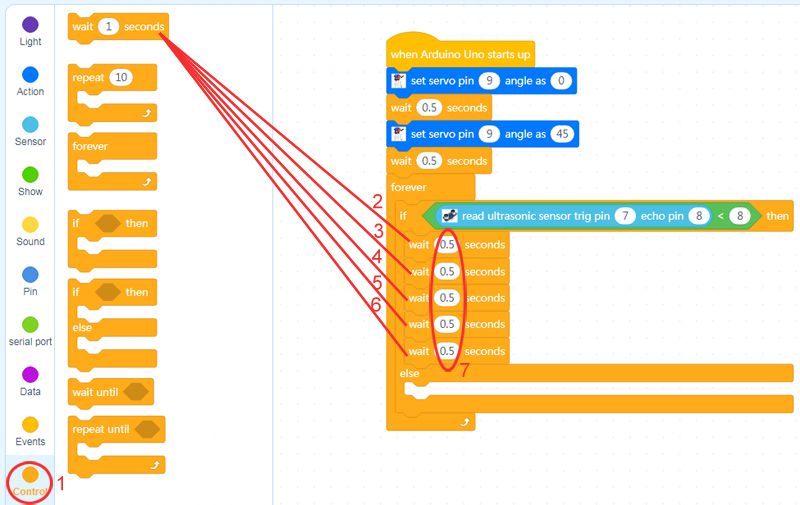
Paso 8: Haga clic en “Control“, arrastre el bloque “Wait 1 seconds” cinco veces dentro de la sección “then” del bloque “ if-then-else ” como se muestra a continuación:
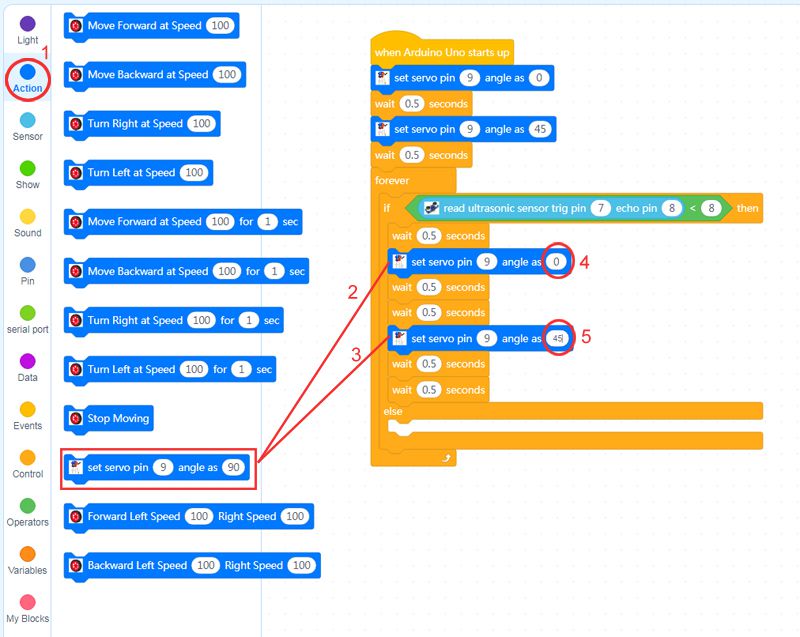
Paso 9: Haga clic en “Action“, luego arrastre los bloques “set Servo Pin” dos veces entre los bloques “wait 1 seconds” y cambie los ángulos a 0 y 45 como se muestra a continuación:
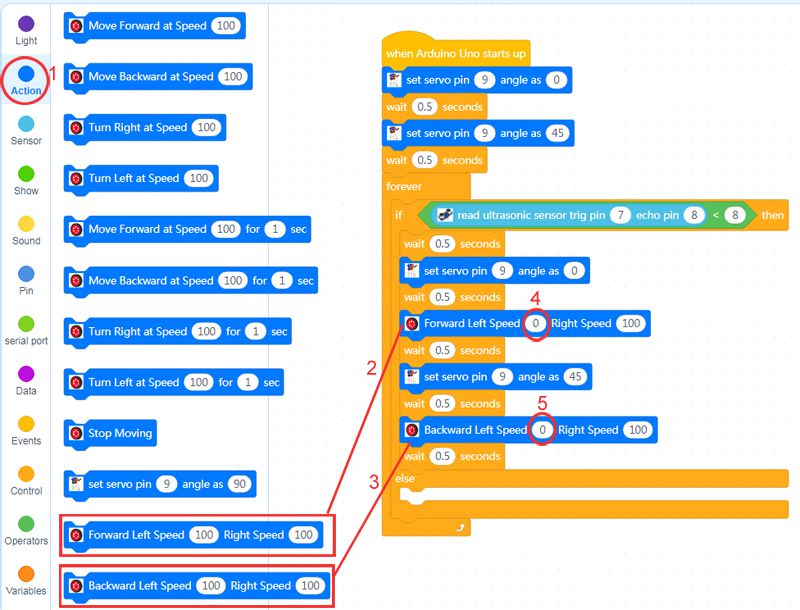
Paso 10: Haga clic en “Action“, luego arrastre los bloques “Forward Left Speed 100 Right Speed 100” y “Backward Left Speed 100 Right Speed 100” y cambie “Left Speed” a 0 como se muestra a continuación:
Paso 11: Haga clic en “Action“, luego arrastre dos veces el bloque “Stop Moving” debajo de “wait x seconds “, como se muestra a continuación:
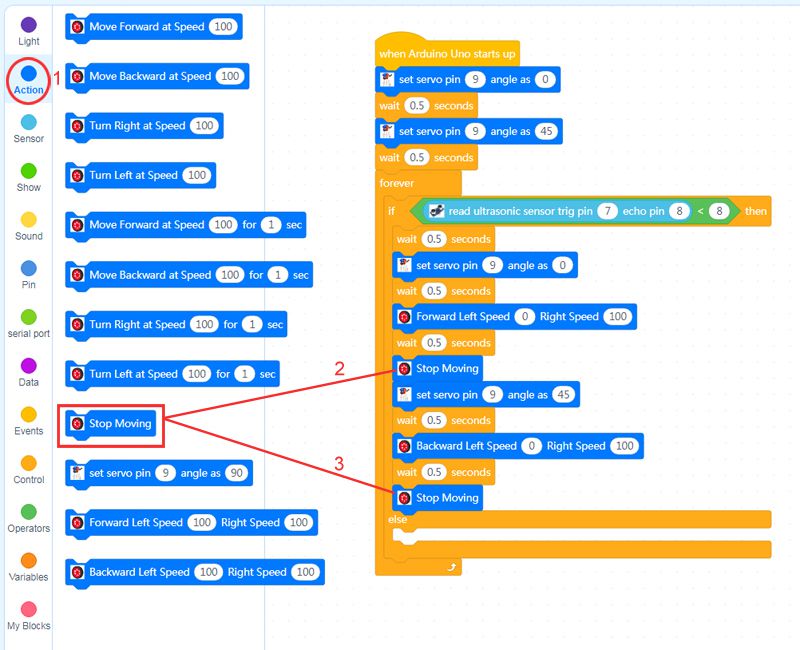
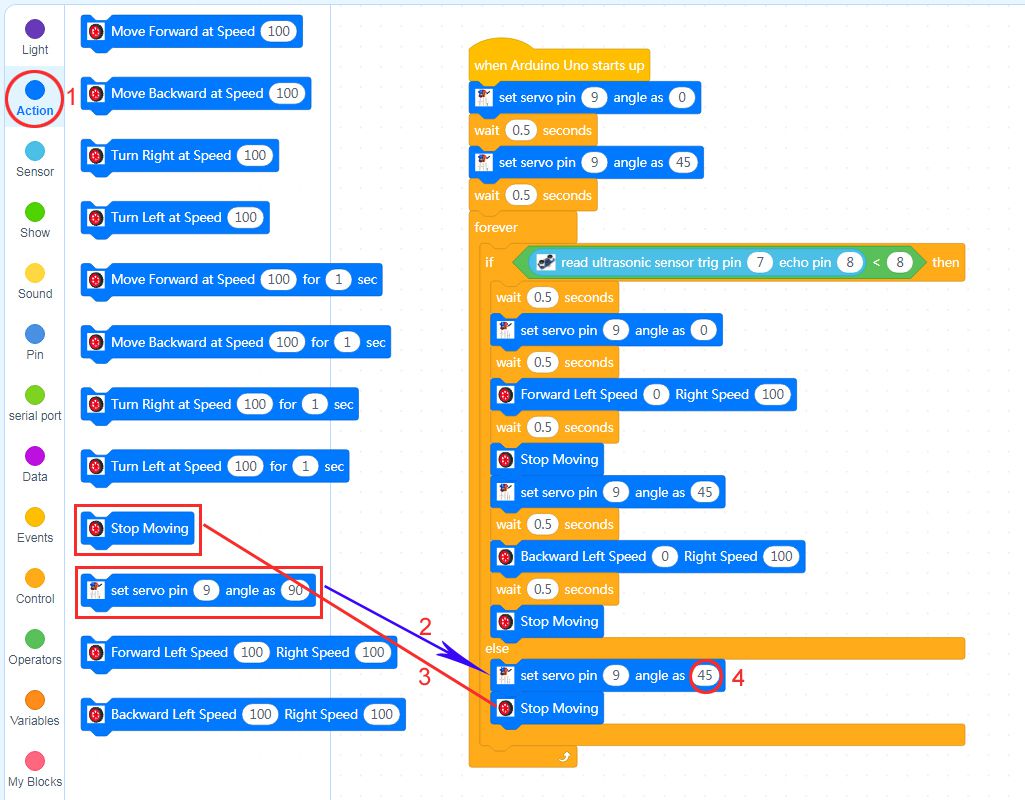
Paso 12: Haga clic en “Action“, luego arrastre los bloques “Stop Moving” y “set Servo Pin” dentro de la sección “else” y cambie el ángulo a 45, como se muestra a continuación:
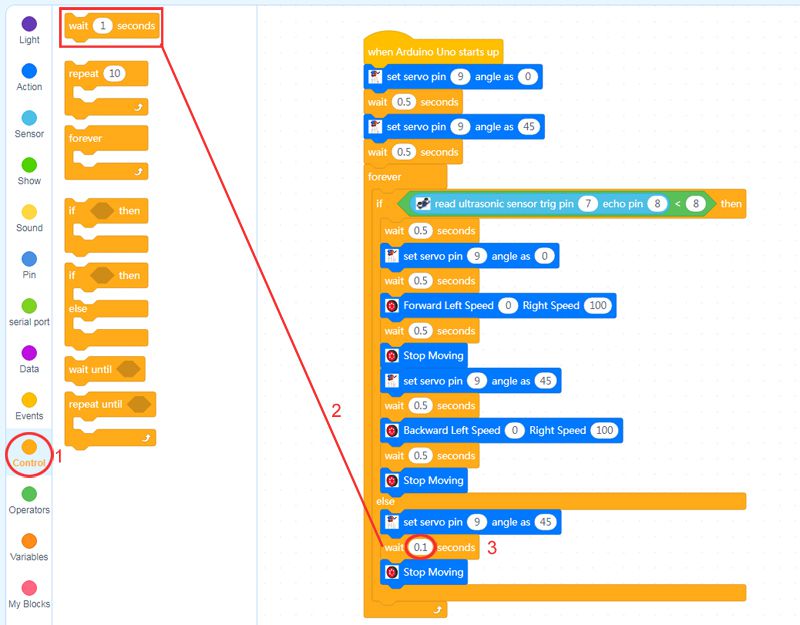
 Paso 13: Haga clic en Control, luego arrastre el bloque wait 1 seconds y cambie el tiempo a 0,5 segundos de la siguiente manera:
Paso 13: Haga clic en Control, luego arrastre el bloque wait 1 seconds y cambie el tiempo a 0,5 segundos de la siguiente manera:
Ahora se han completado todos los bloques de programación! A partir de la imagen anterior, la lógica es bastante sencilla:
Cuando se inicia la placa básica de OSOYOO, el cangrejo se cerrará al principio y luego se abrirá (mi servo 0 grado está cerrado y 45 grados está abierto). La computadora entrará en un bucle infinito que comprobará la distancia entre el objeto y el sensor ultrasónico. Cuando el sensor ultrasónico “vea” el objeto a una distancia inferior a 8 cm, el cangrejo se cerrará para atrapar el objeto y el motor moverá el cangrejo hacia la derecha, luego el cangrejo se abrirá para lanzar el objeto y, finalmente, el motor moverá el cangrejo de regreso. Si la distancia es superior a 8 cm, el cangrejo se mantendrá quieto.
Sube el programa a la placa básica de OSOYOO
- Primero, debe conectar su placa básica de OSOYOO a su PC con un cable USB. Luego, haga clic en el botón “Conectar” en la parte inferior del software mBlock y aparecerá una ventana USB.
- Seleccione la casilla de verificación “Mostrar todos los dispositivos conectables”, luego aparecerá un menú desplegable de dispositivos.
- Seleccione el puerto correspondiente de la lista de dispositivos.
- Finalmente, haga clic en el botón “Conectar” para conectar su PC a la placa básica de OSOYOO.

- Después de haber conectado su PC a la placa básica de OSOYOO, por favor haga clic en el botón “Cargar” en la parte inferior del software. De esta manera, el código se cargará en la placa básica de OSOYOO.


Lo siento, no queda claro cuál es la placa “Magic Board”. ¿Podría proporcionar más información o aclarar su pregunta? Estoy aquí para ayudarlo en lo que pueda.. (Nota: Los siguientes modelos de construcción son solo de referencia y están sujetos a la construcción real)