En este proyecto, utilizamos dos sensores de fotorresistencia para diseñar un simple coche robot seguidor de luz.Utilizando una linterna para brillar en los módulos de fotorresistencia, el coche robot seguirá la luz para avanzar, girar la luz o girar a la izquierda al igual que un lindo gato juega con la luz.Los módulos de fotorresistencia consisten en sensores en la parte delantera del coche, se puede programar para seguir la luz más fuerte.
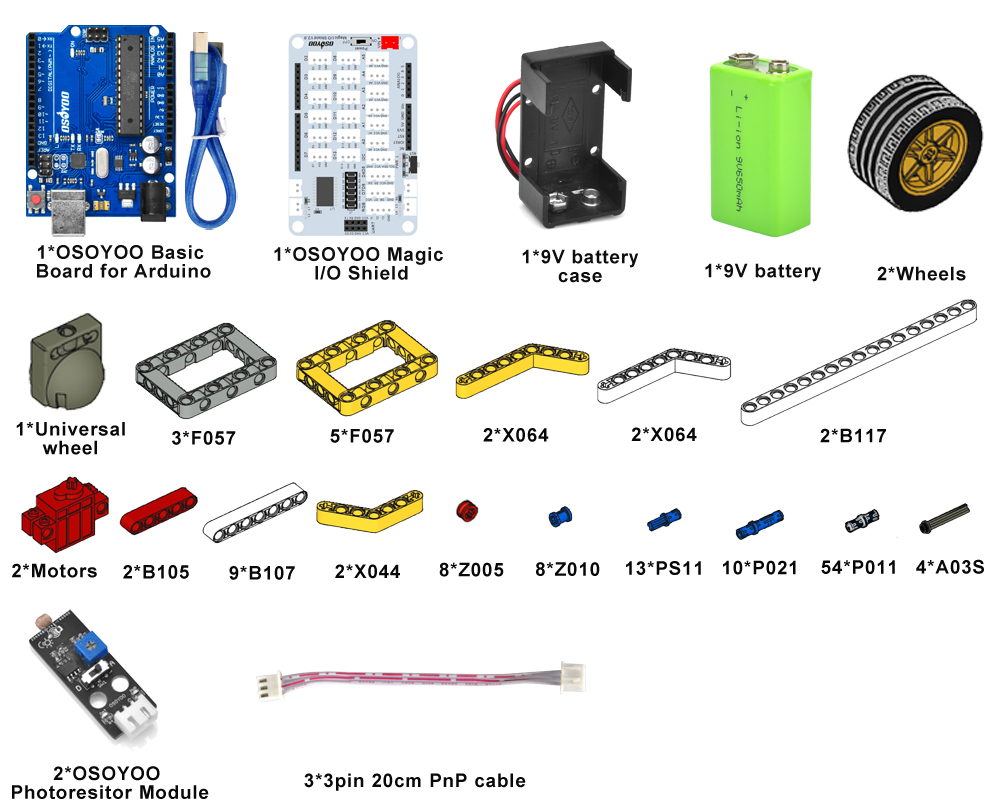
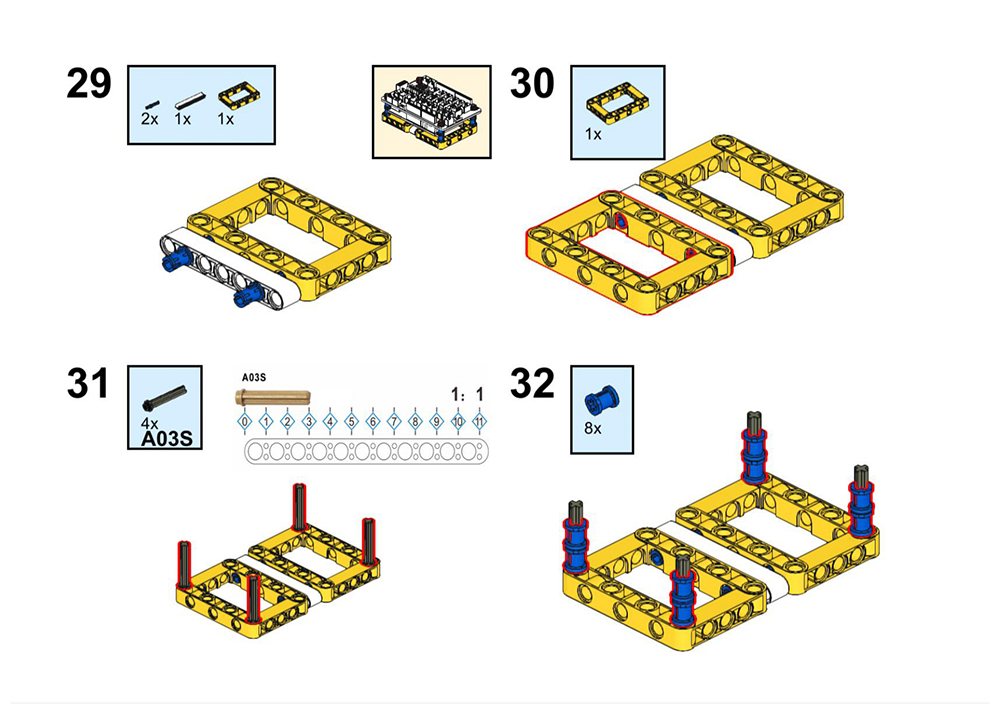
Por favor, prepare las siguientes piezas para completar este proyecto NOTA:
1.el color del bloque de construcción está sujeto al producto real, que no afecta al uso.
2. TODOS LOS PRODUCTOS OSOYOO PARA ARDUINO SON PLACAS DE TERCEROS TOTALMENTE COMPATIBLES CON ARDUINO.
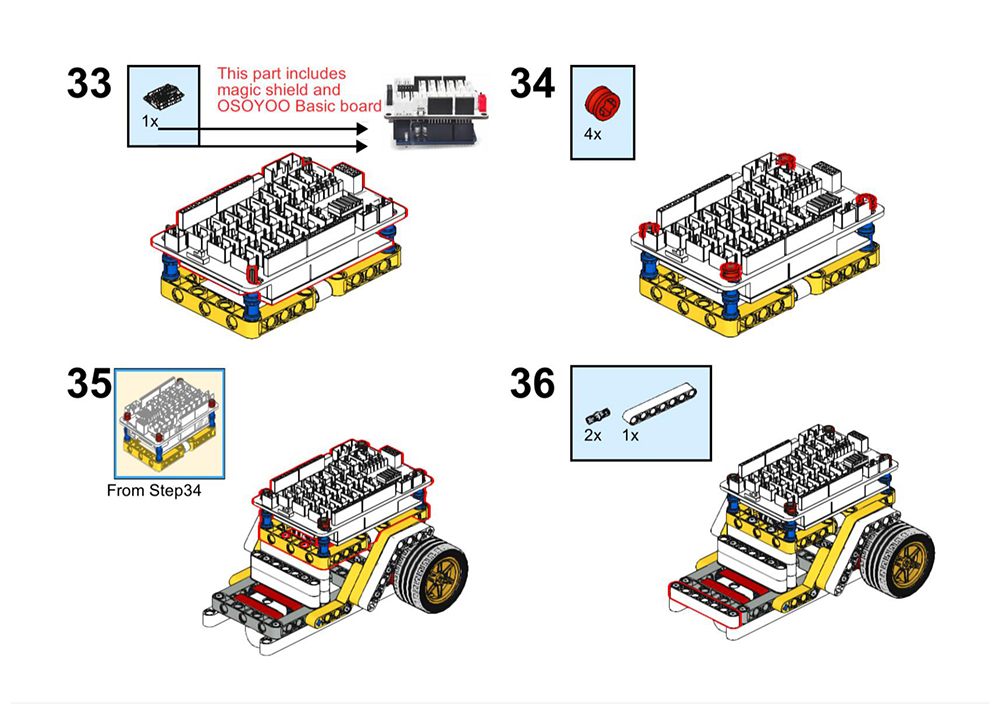
Antes de construir el robot con bloques, por favor instale la placa básica OSOYOO para Arduino bajo el escudo OSOYOO Magic I/O como sigue(Atención por favor: los pines de la pantalla de E/S están alineados con el puerto de la placa básica primero, luego presione la pantalla firmemente en la placa).
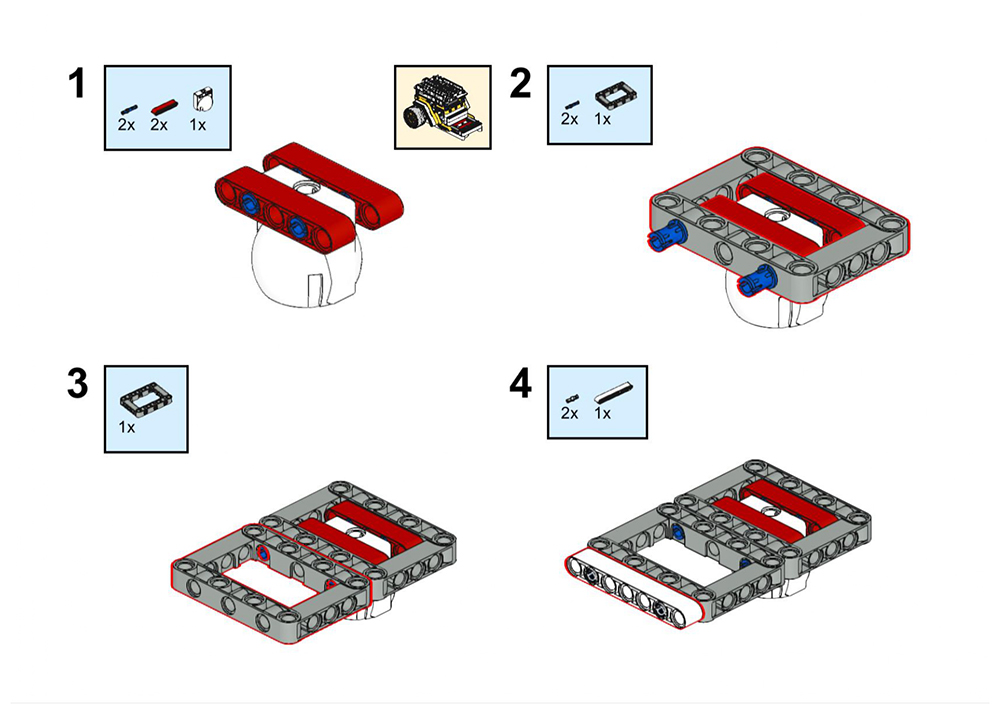
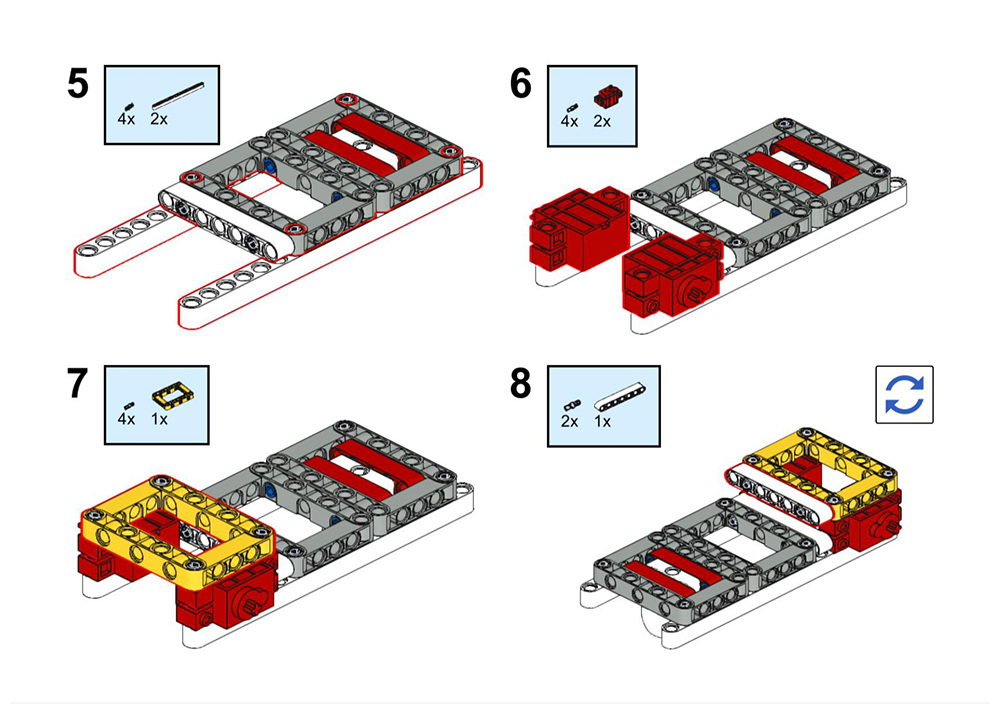
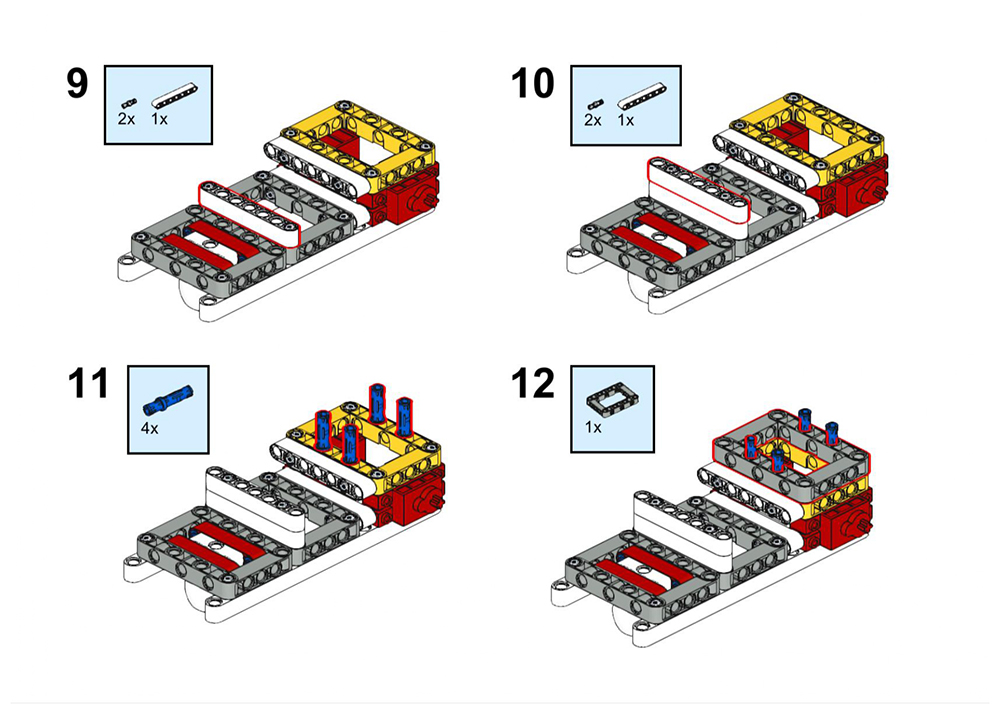
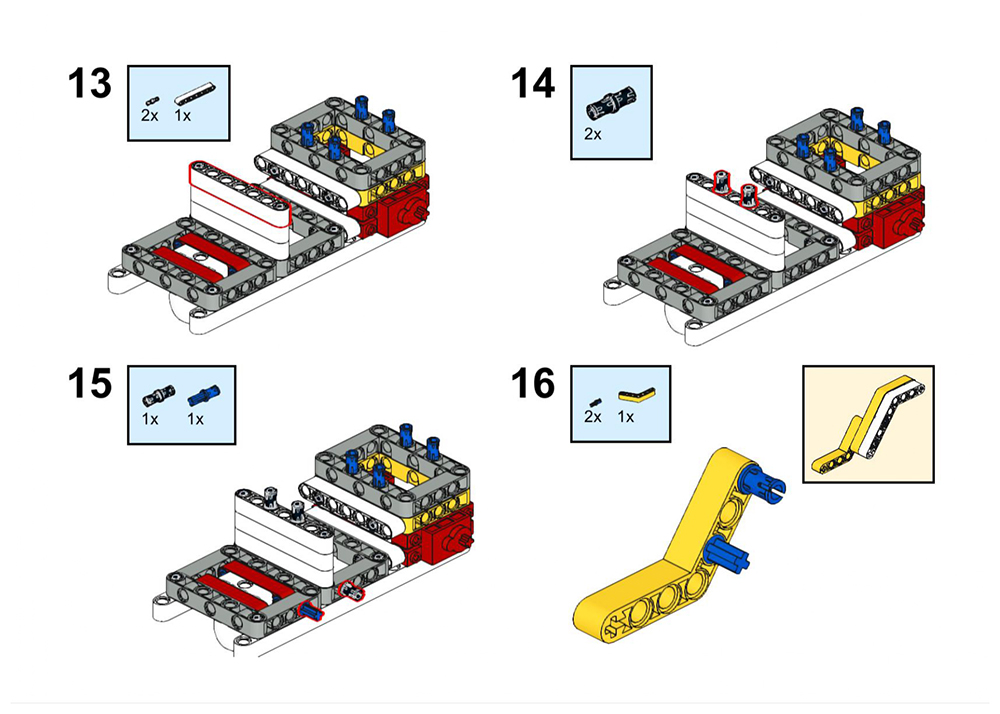
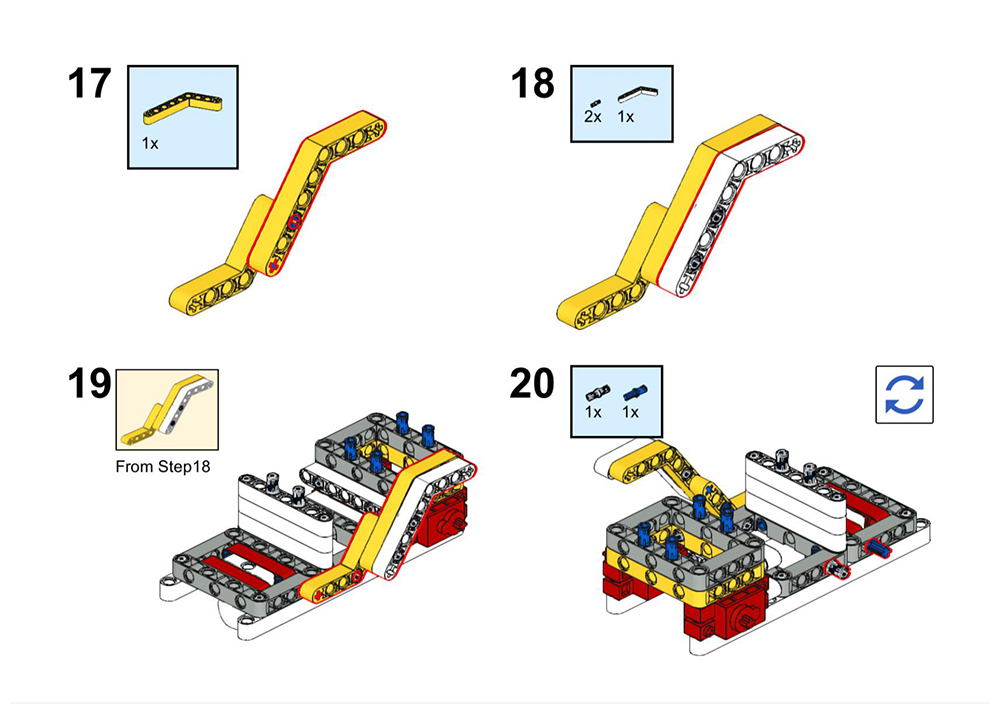
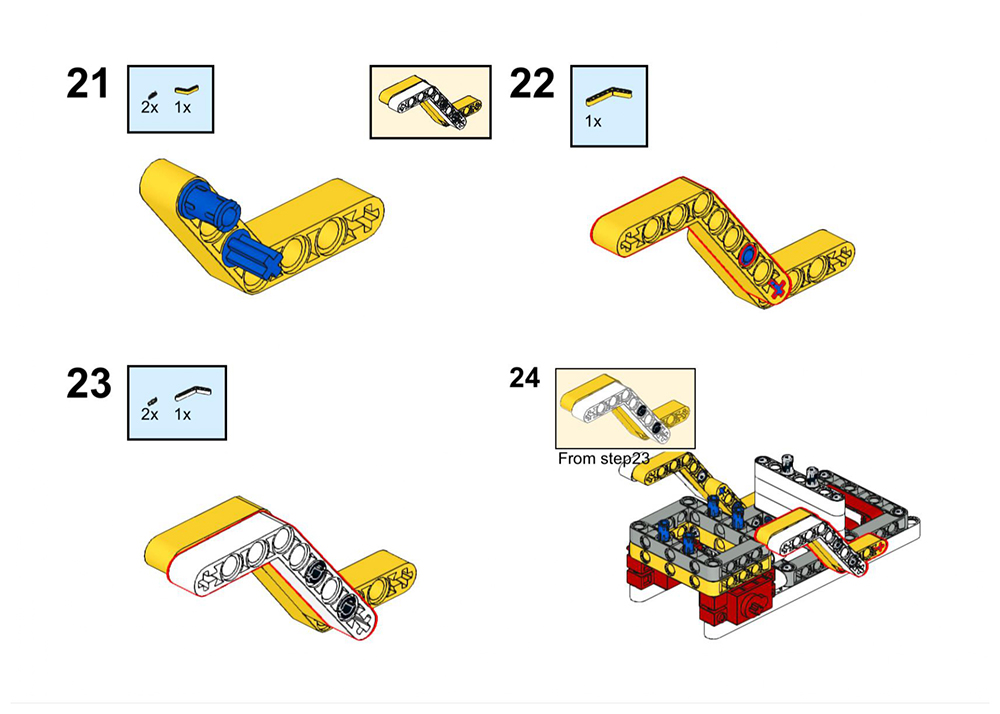
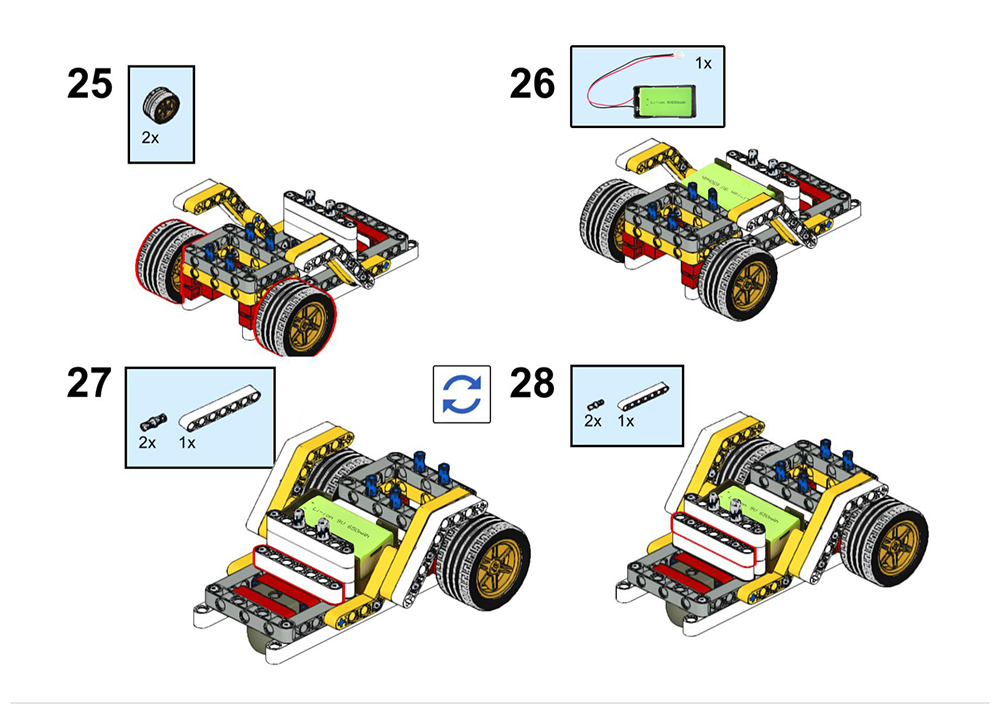
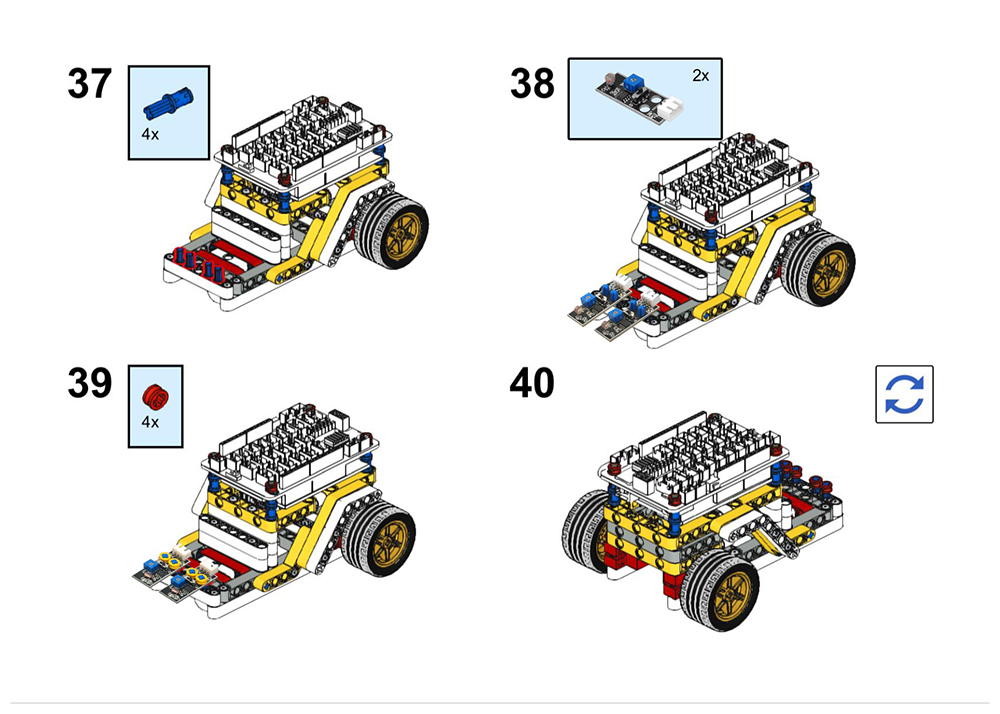
Por favor, siga los pasos de construcción para construir este coche robot, Si desea obtener los pasos de construcción PDF claro, por favor descargue de
Nota: Si has construido el coche robot de la lección 1, salta al paso 35 de este PDF.
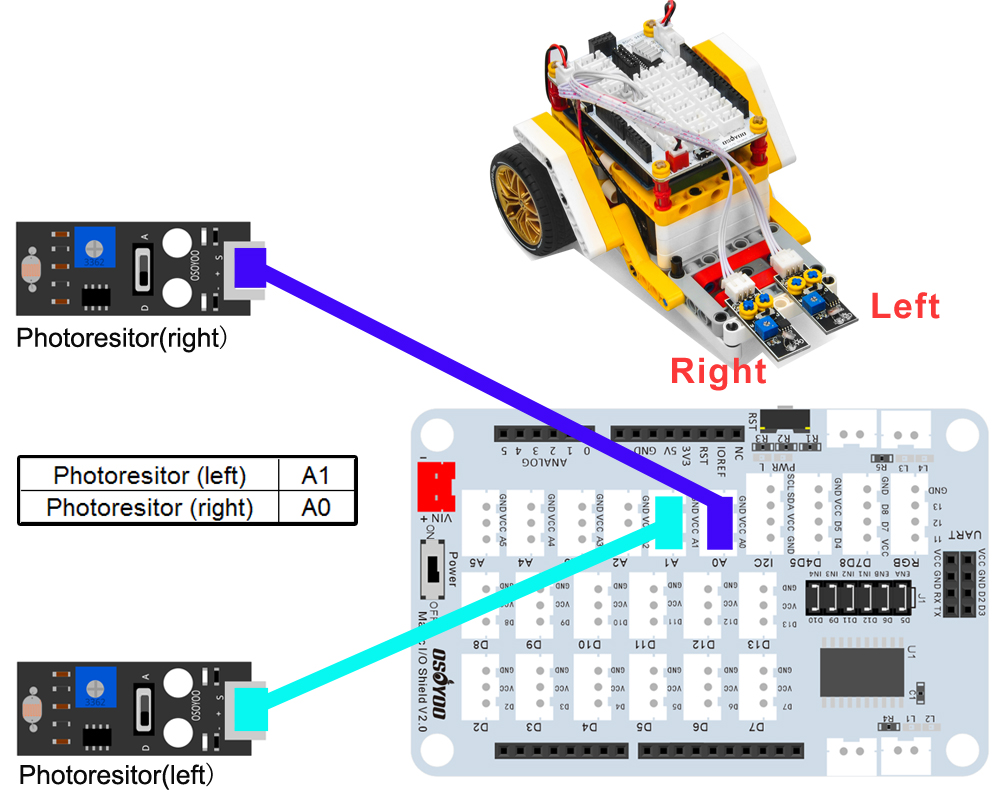
Por favor conecta los motores y la caja de la batería de 9V como en la lección 1. Luego conecta la fotoresistencia izquierda a A1 del Magic I/O shiel, la derecha al puerto A0 con cables PNP de 3 pines como se muestra a continuación(Atención: hay seis puentes en ENA/ENB/IN1/IN2/IN3/IN4):
Paso 3) Ejecute el software mBlock PC haciendo doble clic en el icono del adorable Panda. verá la interfaz de usuario mBlock como en la siguiente imagen. Por favor, elimine el dispositivo por defecto CyberPi haciendo clic en la cruz en el círculo rojo.
Paso 4) Arrastra y suelta el archivo osoyoo_uno_mext (descargado en el Paso 2) al software mBlock de la siguiente manera:
Ahora verá un nuevo firmware del dispositivo en mBlock, vea la siguiente imagen:
¡Ahora el software mBlock y el firmware del dispositivo OSOYOO_UNO han sido instalados con éxito en nuestro PC!
Ahora le mostraremos cómo utilizar los bloques para convertir la idea anterior en realidad.
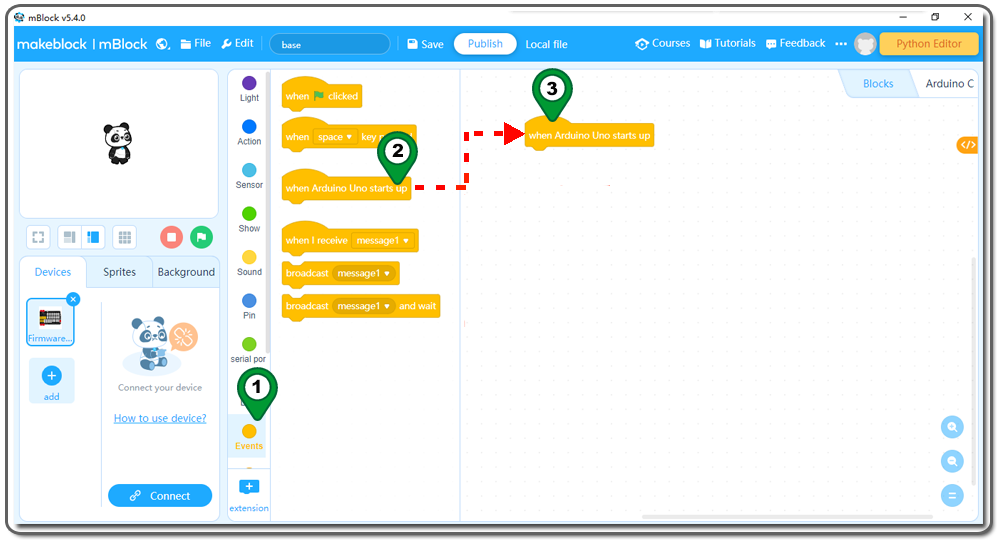
Paso 5)Haz clic en Events, añade el bloque when Arduino Uno starts up a la parte superior:
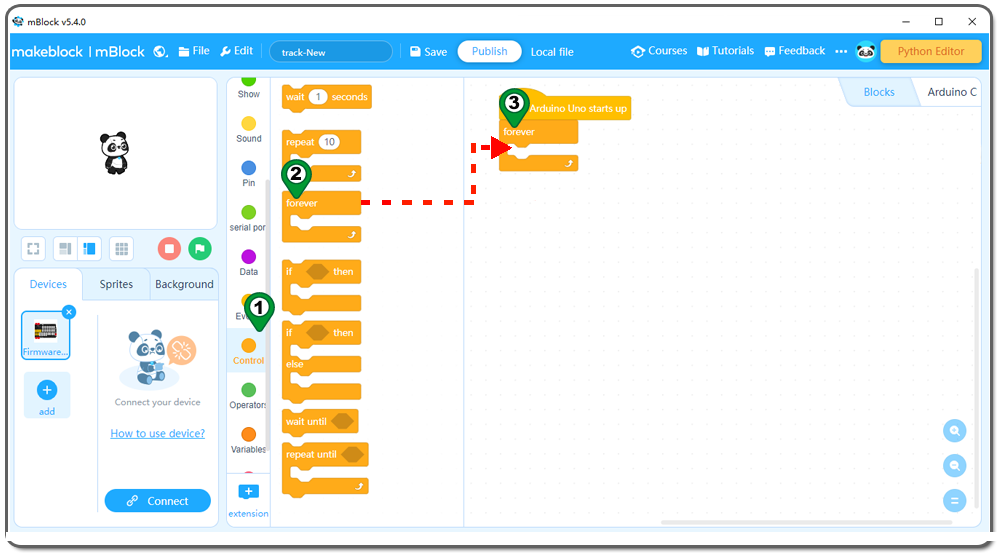
Paso 6: Haga clic en Control y, a continuación, arrastre y suelte el bloque Forever en el área de programación como se indica a continuación:
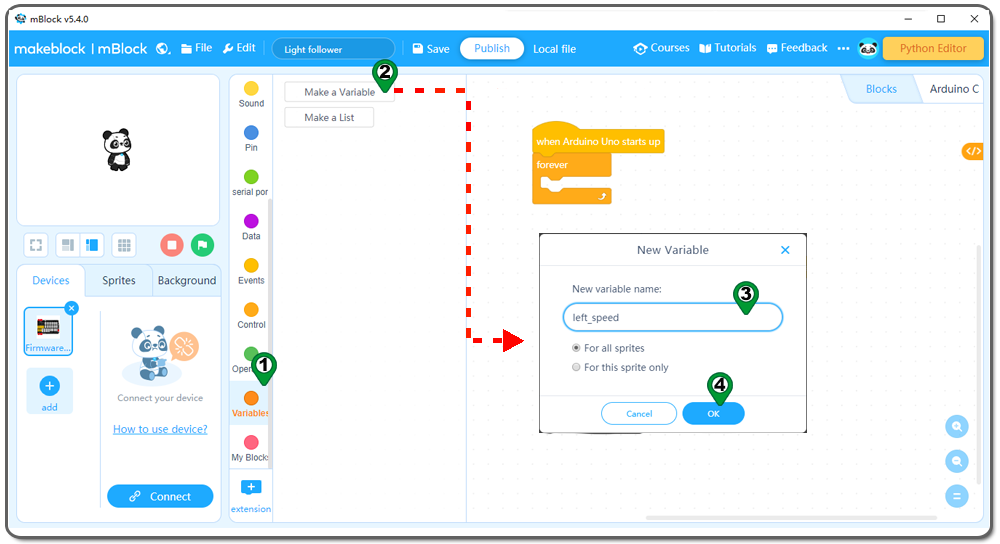
Paso 7: Haga click en Variable , luego click en Make a Variable ,Un nuevo dialogo aparecerá, escriba left_speed ,luego click en OK, tendrá una nueva variable left_speed ;Use el mismo método para crear una variable right_speed;
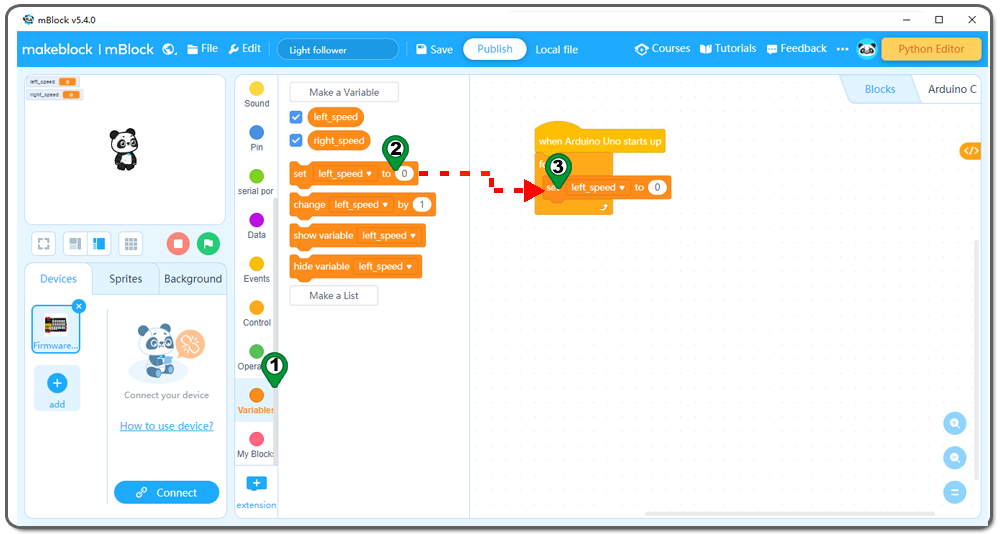
Paso 8: Haga clic de nuevo en Variable, luego arrastre y suelte el bloque set left_speed to en el área de programación como se indica a continuación:
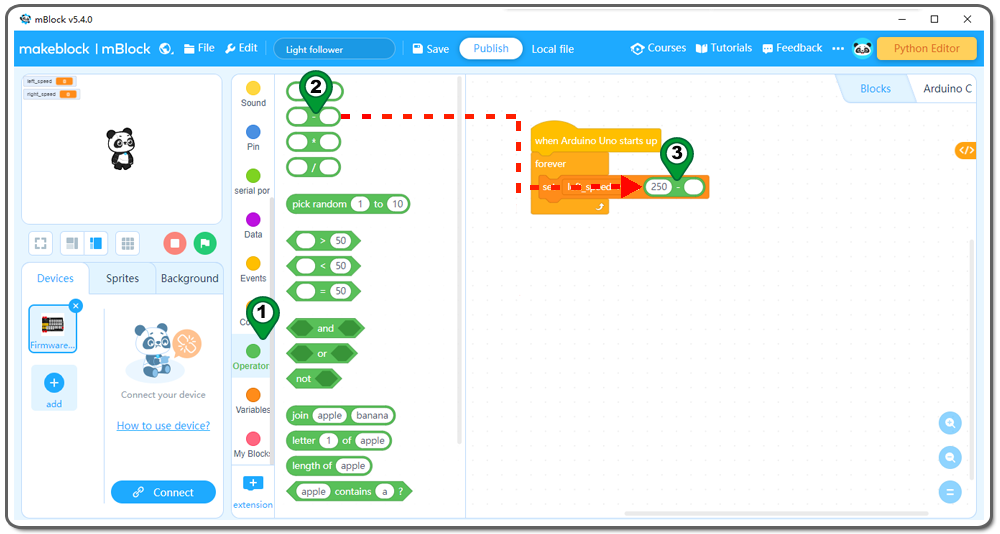
Paso 9:Haga click en Operation , luego arrastre y suelte el bloque 0-0 al area de programacion ,escriba 250 en la primera area como sigue;
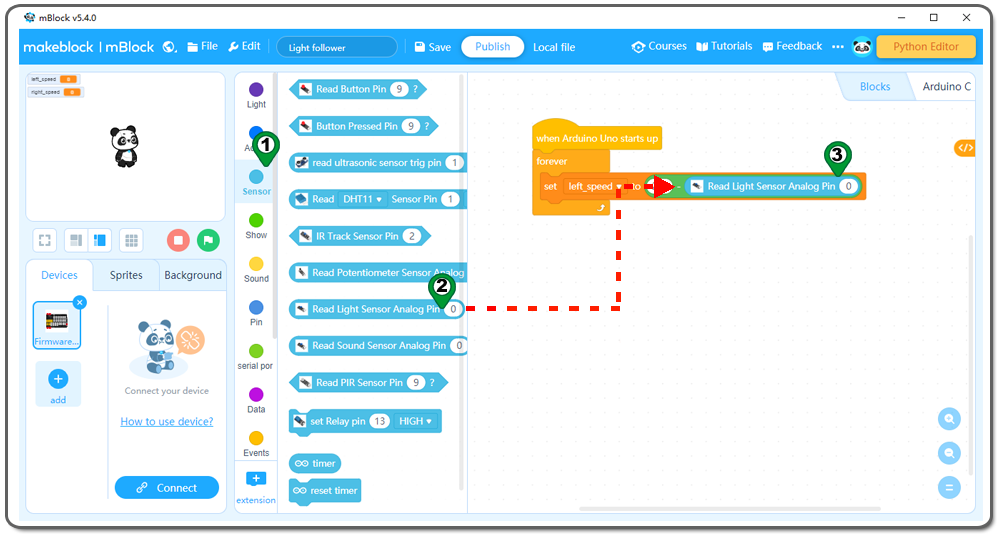
Paso 10: Haga clic en Sensor , luego arrastre y suelte el bloque Read Light Sensor Analog Pin al área de programación de la siguiente manera;
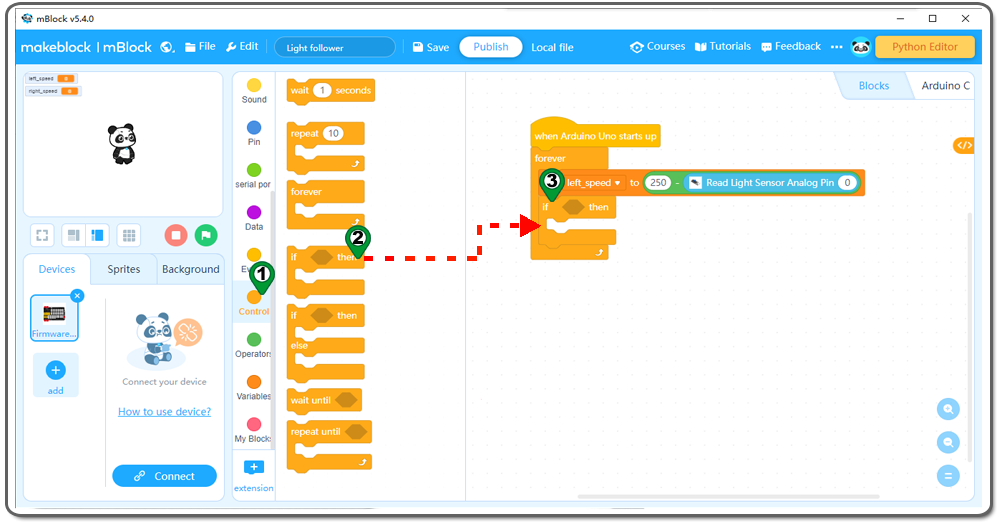
Paso 11: Haga clic en Control y añada un bloque if then dentro del bucle para siempre como se indica a continuación:
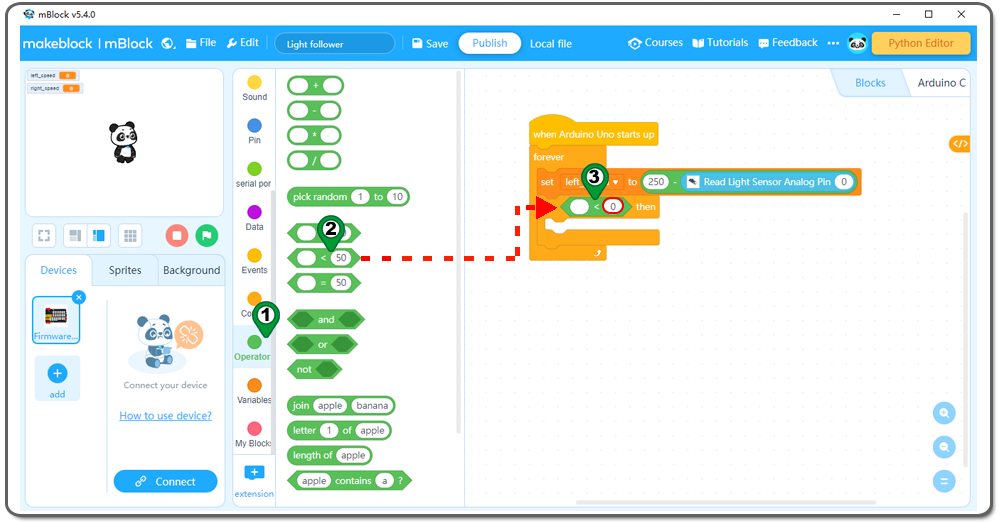
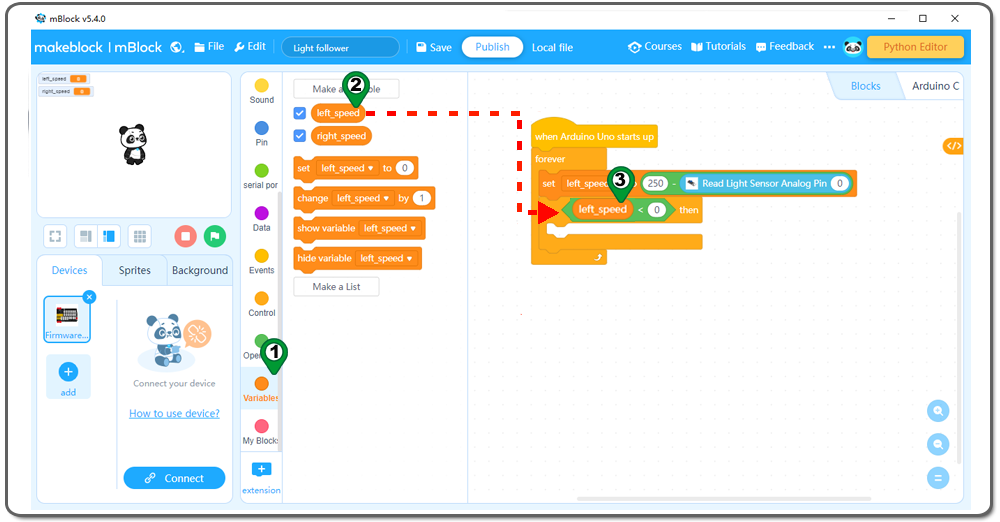
Paso 12: Haga click en Operation , luego arrastre y suelte el bloque 0<0 al area de programacion ,escriba 0 en la segunda area como sigue;
Paso 13: Haga clic en Variable , luego arrastre y suelte el bloque left_speed al área de programación como se indica a continuación:
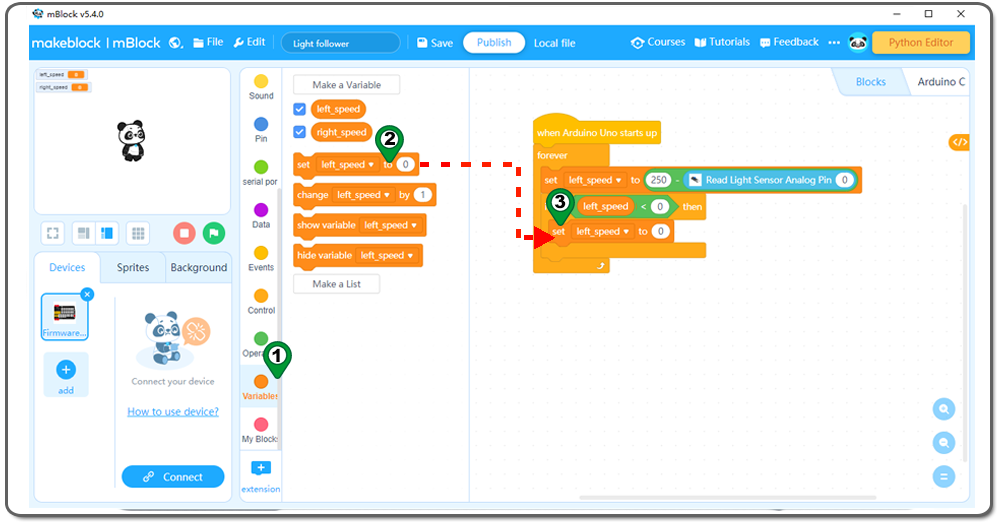
Paso 14: Haga clic de nuevo en Variable, luego arrastre y suelte el bloque set left_speed to al área de programación como se indica a continuación:
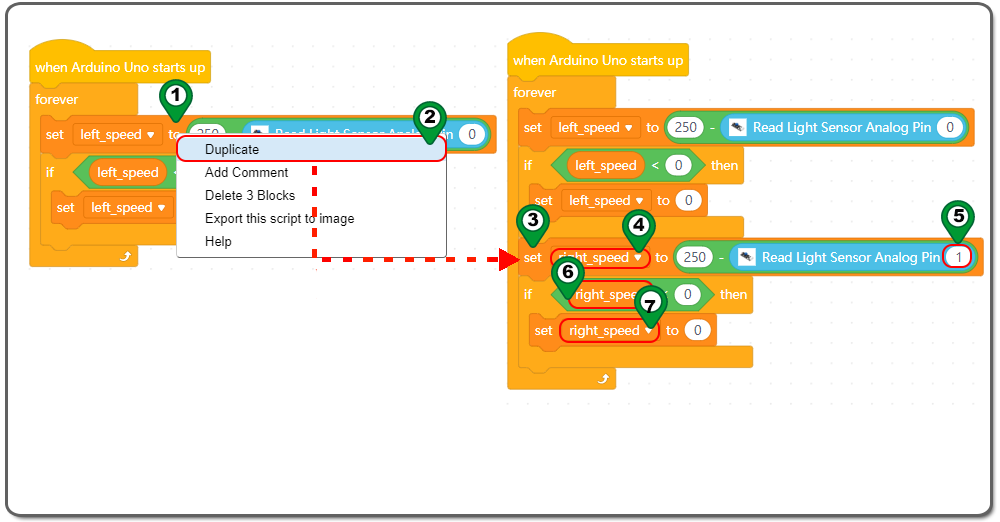
Paso 15: Haga clic con el botón derecho del ratón en el bloque set left_speed to y arrastre y suelte este bloque detrás del bloque if then . Cambie left_speed por right_speed como se indica a continuación:
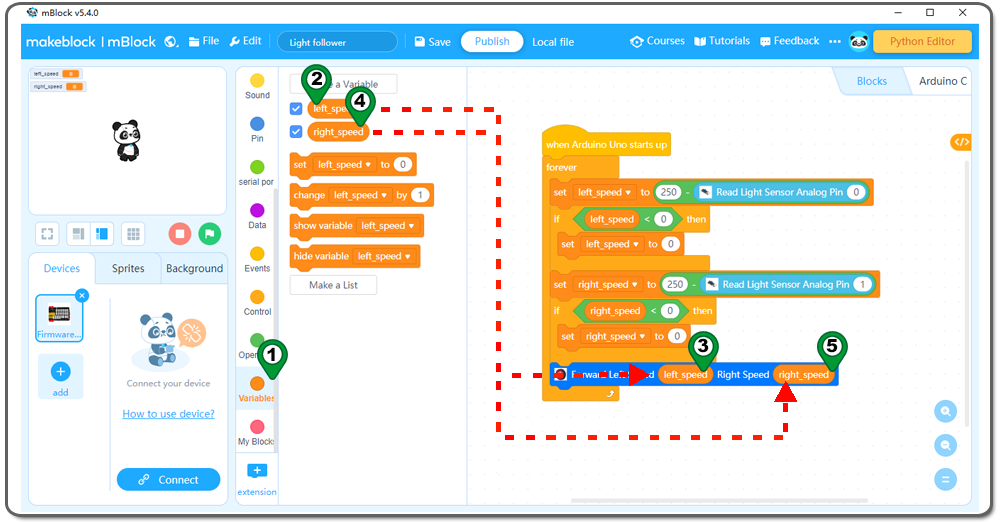
Paso 16: Vuelva a hacer clic en Action y, a continuación, arrastre y suelte el bloque Forward Left Speed 100 Right Speed 100 en el área de programación como se indica a continuación:
Paso 17:Haga clic en Variable , luego en el bloque left_speed y en el bloque right_speed para ir al área de programación como se indica a continuación:
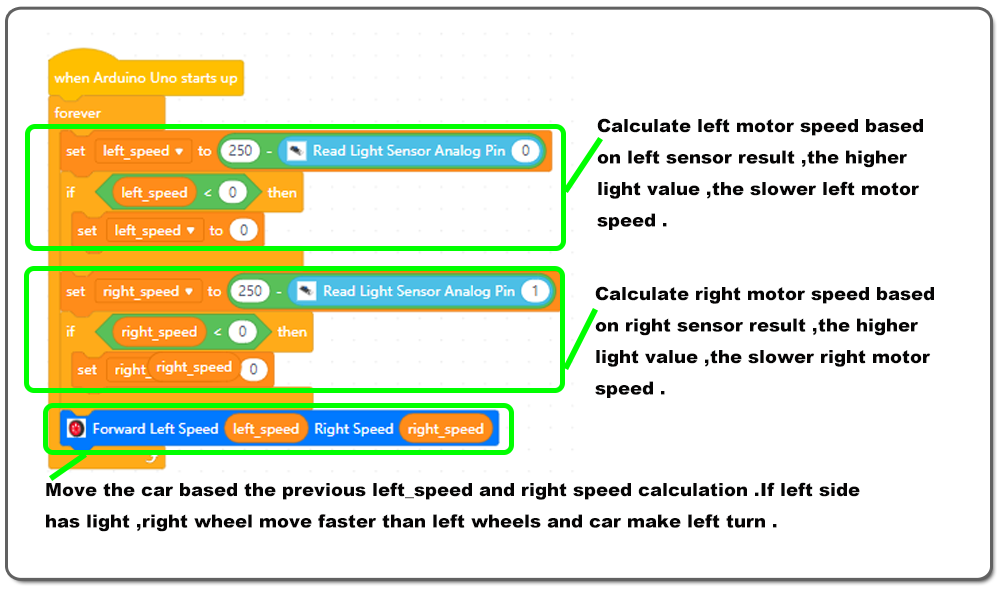
Ahora hemos completado la programación de bloques. Los bloques finales tienen el siguiente aspecto:
Ahora todos los bloques de programación están completos. Desde la imagen de arriba, la lógica es bastante sencillo:
Cuando se inicia Arduino, el ordenador entrará en un bucle muerto que comprobará el estado del botón, cuando el botón no está presionado, el servo se detendrá en la posición original (en mi servo 0 grados) y el ascensor está en el suelo, cuando se pulsa el botón, el brazo del servo girará desde la posición de 0 grados a la posición de 180 grados y el ascensor se eleva al aire.
Paso 18) Cargar el programa en la placa básica OSOYOO
1)Primero conecte su placa básica OSOYOO a su PC con un cable USB. A continuación, haga clic en el botón Conectar en la parte inferior del software mBlock, verá una ventana USB emergente,
2)seleccione la casilla Show all connectable device , y aparecerá un menú desplegable de dispositivos,
3) seleccione su puerto en el menú desplegable de dispositivos
4) haga clic en el botón Connect para conectar su PC a la placa básica OSOYOO.
5)Después de conectar su PC a la placa base OSOYOO, haga clic en el botón Upload en la parte inferior de su software, entonces el código se cargará en la placa base OSOYOO:
En las Lecciones 1 y 2 anteriores, hemos aprendido algunos bloques de programa básicos de control y acción. En esta lección, aprenderemos algunos bloques de programa nuevos: i)Read Light Sensor from Analog Pin Block from Sensor category
Este bloque tiene forma ovalada, lo que significa que devuelve un valor numérico entre 0 y 255. El número cero en el lado derecho significa que el sensor leerá el valor de luz del pin A0 (sensor de luz izquierdo). El número cero en el lado derecho significa que el sensor leerá el valor de luz del pin A0 (sensor de luz izquierdo).
ii)Minus calculation block from Operator category
El bloque anterior calcula el resultado de 250 menos el valor del sensor A0 .
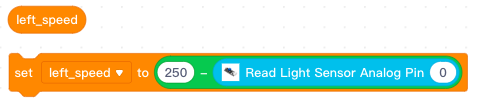
iii)Variable Block and Set Variable to Block in Variable Category:
El bloque de variables se define a menudo para guardar un resultado de cálculo para su uso posterior.
El bloque anterior define un bloque variable “velocidad_izquierda”, luego establece su valor al cálculo de 250 menos el valor de retorno del sensor de luz A0. El valor de la luz es mayor, el left_speed es menor, por lo que el coche va a hacer girar a la izquierda.
Aquí está la explicación completa del bloque de programa:
El principio de funcionamiento de la fotoresistencia es que cuanto más intensa sea la luz que detecta, menor será el valor de la lectura de la fotoresistencia. El valor de la lectura de la fotoresistencia es superior a 0.
En el programa establecemos la velocidad del motor izquierdo como variable de left_speed, la velocidad del motor derecho como variable de right_speed. La velocidad del motor está entre 0-255.
La variable de left_speed es igual a 250 menos el valor de la lectura del fotoresistor izquierdo (A0), y la variable de right_speed es igual a 250 menos el valor de la lectura del fotoresistor derecho (A1). Si las variables son menores que 0, el programa fija estas variables igual a 0.
Si el valor de lectura del sensor izquierdo (A0) es inferior a 250, el motor izquierdo avanzará;
Si el valor de lectura del sensor izquierdo(A0) es superior a 250, el motor izquierdo se detendrá;
Si el valor de lectura del sensor derecho(A1) es inferior a 250, el motor derecho avanzará;
Si el valor de lectura del sensor derecho(A1) es superior a 250, el motor derecho se detendrá;
Si el valor de la lectura de ambos sensores es inferior a 250, ambos motores avanzarán.
Sube el código del boceto followlight.ino a Arduino. Enciende el coche.
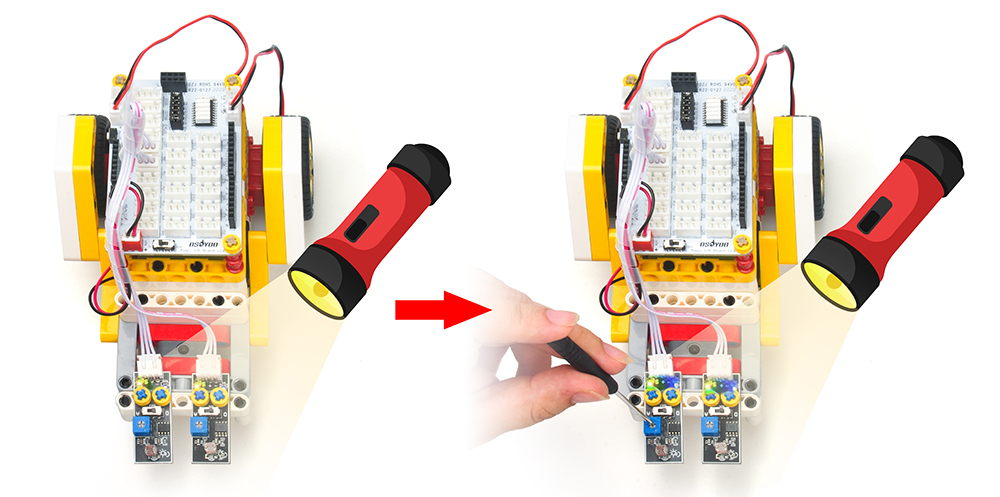
Ilumine el sensor fotorresistente delantero con una linterna. Entonces el coche seguirá la linterna para hacer el movimiento.
Si la linterna ilumina el sensor fotorresistente, pero el coche no se mueve. Por favor, ajuste el regulador como se muestra en la imagen. En circunstancias normales, la luz amarilla y la luz azul se encenderán al mismo tiempo cuando se encienda la linterna.