Puede descargar el manual de usuario en

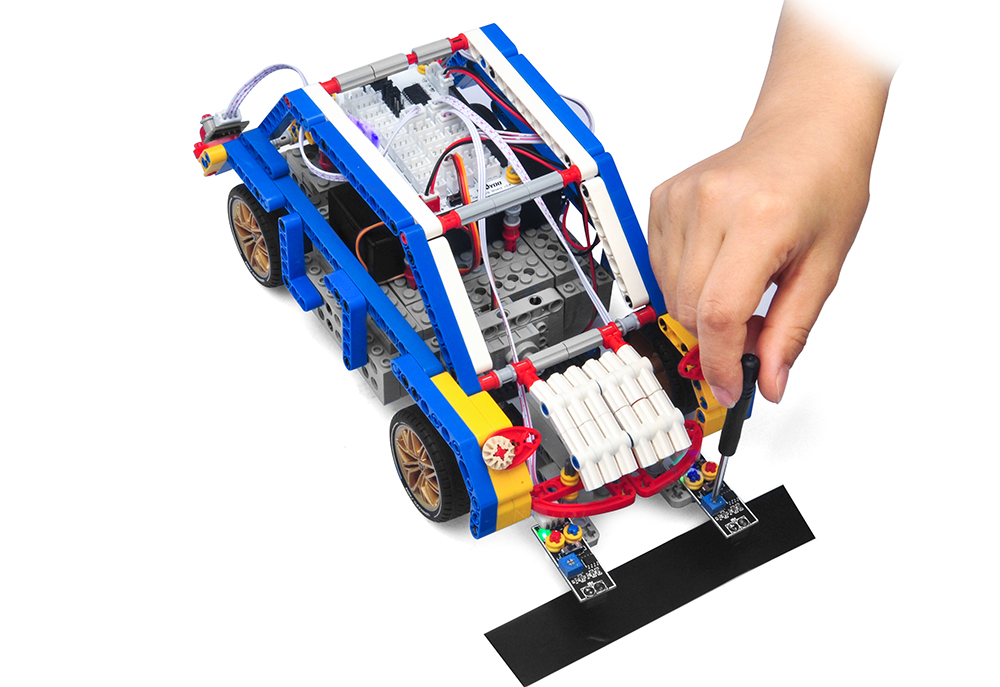
En este tutorial, vamos a utilizar dos sensores de seguimiento OSOYOO para guiar el coche para moverse a lo largo de la línea de pista negro en el suelo blanco de forma automática. El software de esta lección leerá los datos de los sensores de seguimiento y guiará automáticamente el coche para que se mueva a lo largo de la línea de pista negra en el suelo blanco.
Un Robot Seguidor de Línea, como su nombre indica, es un vehículo de conducción automática que sigue una línea de pista negra impresa en el suelo blanco. Los sensores de seguimiento del robot comprueban constantemente si la posición actual del coche está fuera de la pista. En caso afirmativo, el coche realizará un movimiento negativo para que el coche robot vuelva a la pista.
Si no completas el encuadre del coche, por favor revisa lección 1


Si no has completado la conexión básica de los cables, revisa la lección 2.
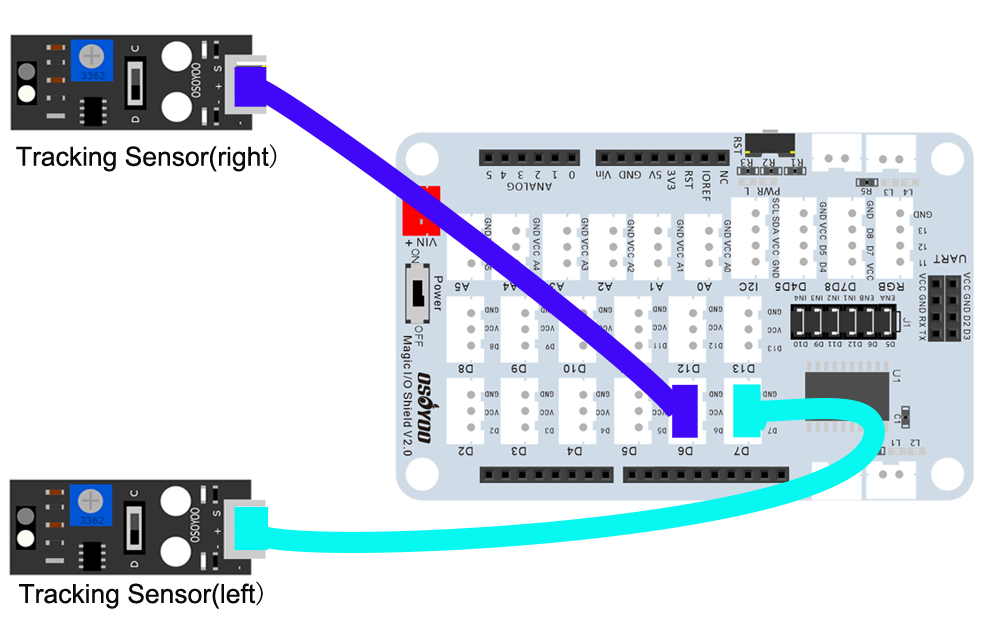
Conexión:
Sensor de seguimiento izquierdo a D7
Sensor de Seguimiento Derecho a D6

PASO 1:
Descargue https://osoyoo.com/driver/2022008400/lesson3.zip , descomprímalo, verá una carpeta llamada lesson3
PASO 2:
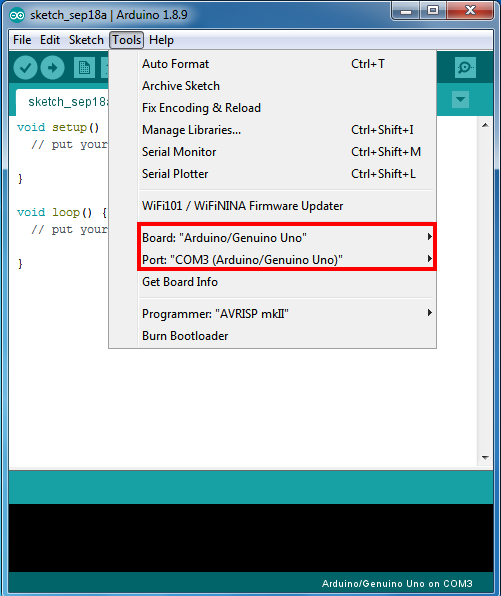
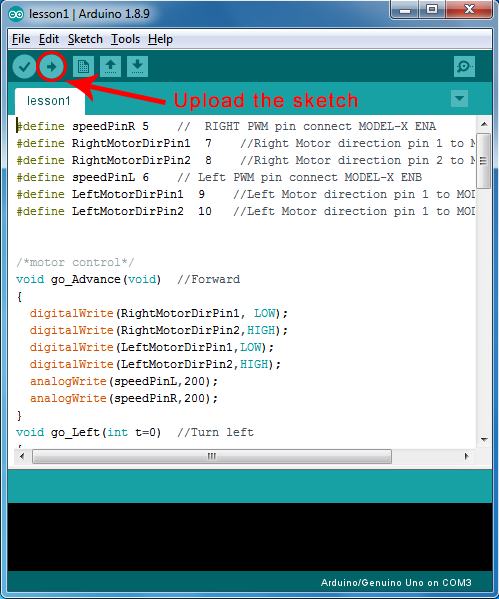
Conecta la placa UNO R3 al PC con el cable USB, abre el IDE, elige la placa/puerto correspondiente para tu proyecto.
Nota: Apague la batería o desenchufe el adaptador de corriente cuando cargue el código del boceto en la placa básica OSOYOO para Arduino.
PASO 3:
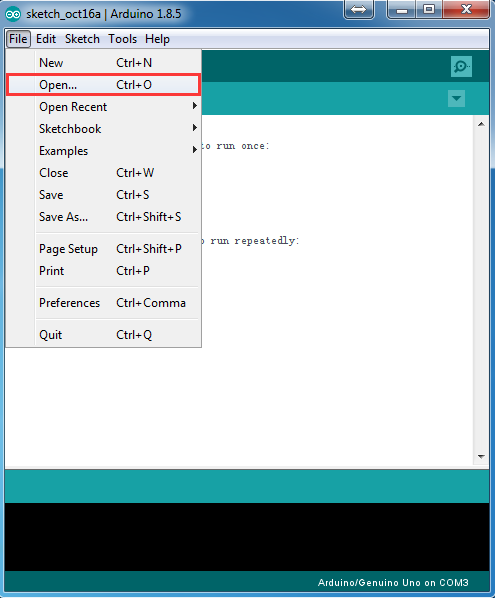
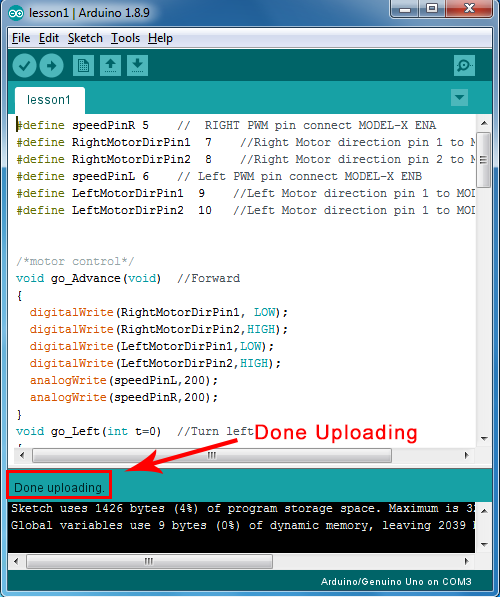
Haga clic en archivo -> haga clic en Abrir -> elija el código “lesson3.ino”, cargue el código en la Placa Básica OSOYOO para Arduino, y luego cargue el sketch en la placa.
Nota: Alineación del servo
Por favor, cambie el valor por defecto 90 en la siguiente línea como el valor FRONT en la opción 2 en el paso 5 de lesson2. Si alineas la dirección de la rueda manualmente como en la opción 1 del Paso 5 de la lección 2, por favor sáltate este paso.
#define FRONT 90 // steering to front
PASO 4:
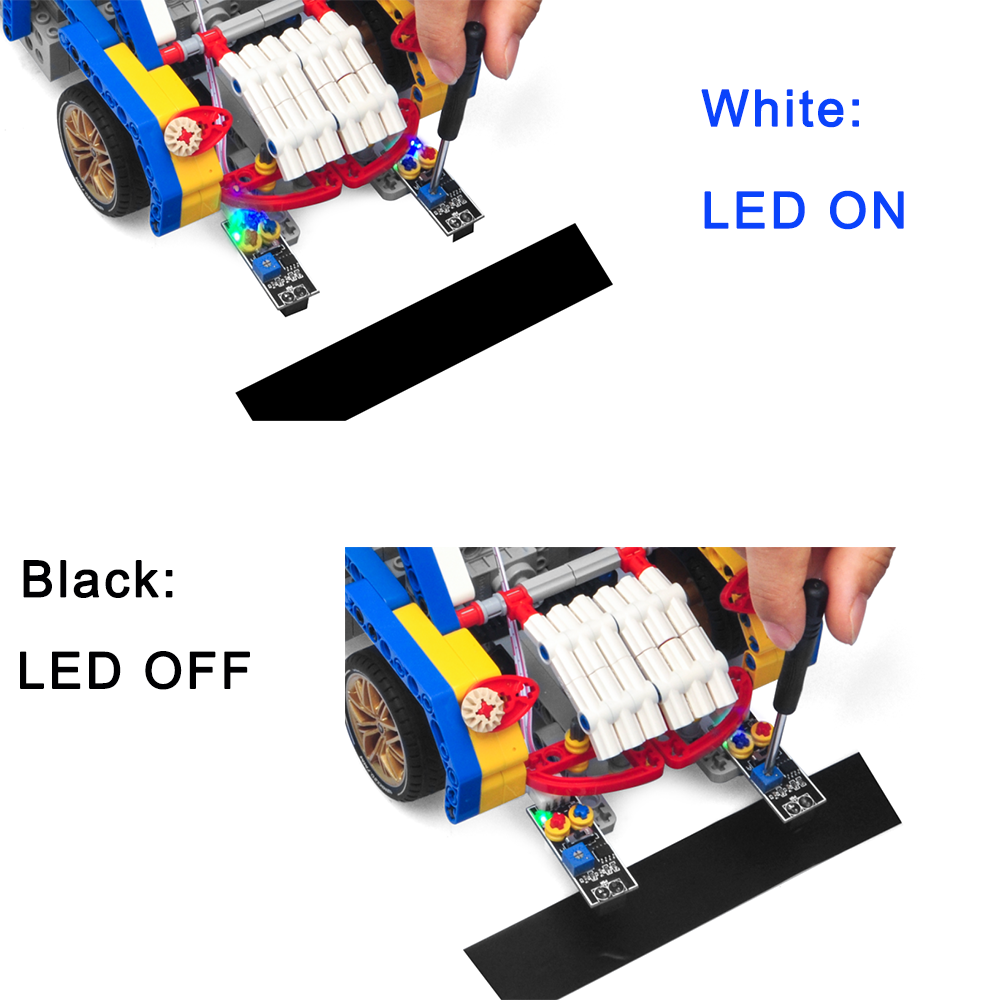
Ajuste la sensibilidad de los módulos sensores de seguimiento.
Encienda y sostenga el coche y ajuste el potenciómetro del sensor de seguimiento con un destornillador de estrella hasta que obtenga el mejor estado de sensibilidad: la luz LED indicadora de señal se apagará cuando el sensor esté sobre suelo blanco, y la luz LED indicadora de señal se encenderá cuando el sensor esté sobre pista negra.
 1.Prepare una pista negra (la anchura de la pista negra es superior a 20 mm e inferior a 30 mm) en suelo blanco. Tenga en cuenta que el ángulo de curvatura de la pista no puede ser superior a 30 grados. Si el ángulo es demasiado grande, el coche se saldrá de la pista.
1.Prepare una pista negra (la anchura de la pista negra es superior a 20 mm e inferior a 30 mm) en suelo blanco. Tenga en cuenta que el ángulo de curvatura de la pista no puede ser superior a 30 grados. Si el ángulo es demasiado grande, el coche se saldrá de la pista.
2. 2. Ponga el coche en la pista, encienda el interruptor del escudo del motor OSOYOO y el interruptor de la caja de baterías, el coche se moverá a lo largo de la pista negra.
Nota: Si el coche no se mueve según el resultado mencionado anteriormente, debe comprobar la conexión de los cables del sensor de seguimiento, el voltaje de la batería (debe ser superior a 7,2v).
3.Si quieres cambiar el ángel de la derecha o de la izquierda, por favor edita la siguiente línea del código y vuelve a subir el sketch:
int RIGHT=FRONT-70;
int LEFT=FRONT+70;
4. Si quieres cambiar la velocidad del coche, por favor revisa el siguiente código del sketch (Nota: el valor máximo es 255)
#define SPEED 190
#define HI_SPEED 220