
Descripción general
Puedes usar el microcontrolador UNO R3 y agregar componentes externos para completar una variedad de experimentos asombrosos, como la construcción de un robot inteligente. Cuando construyas tu robot, es necesario utilizar la placa controladora de motores para conducir los motores DC, sin embargo, a veces es necesario conectar la placa controladora de motores al UNO mediante muchos cables puente, lo que puede resultar bastante incómodo.
El shield de motores se puede alimentar directamente desde Arduino o desde una fuente de alimentación externa. Se recomienda encarecidamente utilizar una fuente de alimentación externa para alimentar el shield de motores.
Esta placa también proporciona indicadores LED de dirección para ambos canales y esto es muy útil durante la etapa de configuración para verificar el comportamiento del firmware; los indicadores LED también funcionan sin aplicar un motor real a la salida.
Características
- Pin out estándar para UNO Shield
- Basado en el chip controlador de motor L293DD
- Conduce 2 motores de corriente continua o 1 motor paso a paso
- Entrada de energía externa disponible
- Interruptor de encendido externo
- Botón de reinicio (RST)
- Interfaces de energía de 5V/3.3V/GND
- Jumper de interruptor de energía del controlador de motor
- Interfaz de hardware UART/Interfaz de software UART
- Interfaces de sensores
- Todos los pines GPIO disponibles
- Cableado conveniente para el motor a través de jumpers
- 4 luces indicadoras de dirección
- Disipador de calor para un mejor rendimiento
- Función de IoT de Wifi cuando se trabaja con el módulo de Wifi OSOYOO (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Función Bluetooth cuando se trabaja con el módulo Bluetooth HC-02 (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)PRECAUCIÓN:
El CI controlador y el disipador de calor pueden volverse muy calientes cuando se trabaja con una corriente superior a 1000mA.
Especificaciones
- Voltaje de entrada de la parte lógica VD: 5V
- Voltaje de entrada (recomendado): 7 ~ 12V
- Voltaje de entrada (límite): 6-20V
- Corriente de trabajo de la parte lógica Iss: <36mA
- Corriente de funcionamiento de la parte de conducción Io: 1.2A
- Disipación máxima de potencia: 25W (T = 75 Celsius)
- Nivel de entrada de señal de control: Alto 2.3V bajo -0.3V
- Temperatura de trabajo: -25 + 130 Celsius
- Toma de corriente de tornillo: Terminal de paso de 5.0mm
- Clip de cinturón y se puede controlar a través del acceso de fila frontal de la señal
- Tipo de controlador: Controlador de puente H de doble potencia
- Ocupación de pines: D7 ~ D10 control directo del motor
- Admite control de velocidad del motor en modo PWM / PLL
- Peso 29 g
- Dimensiones 68.5 x 53 mm
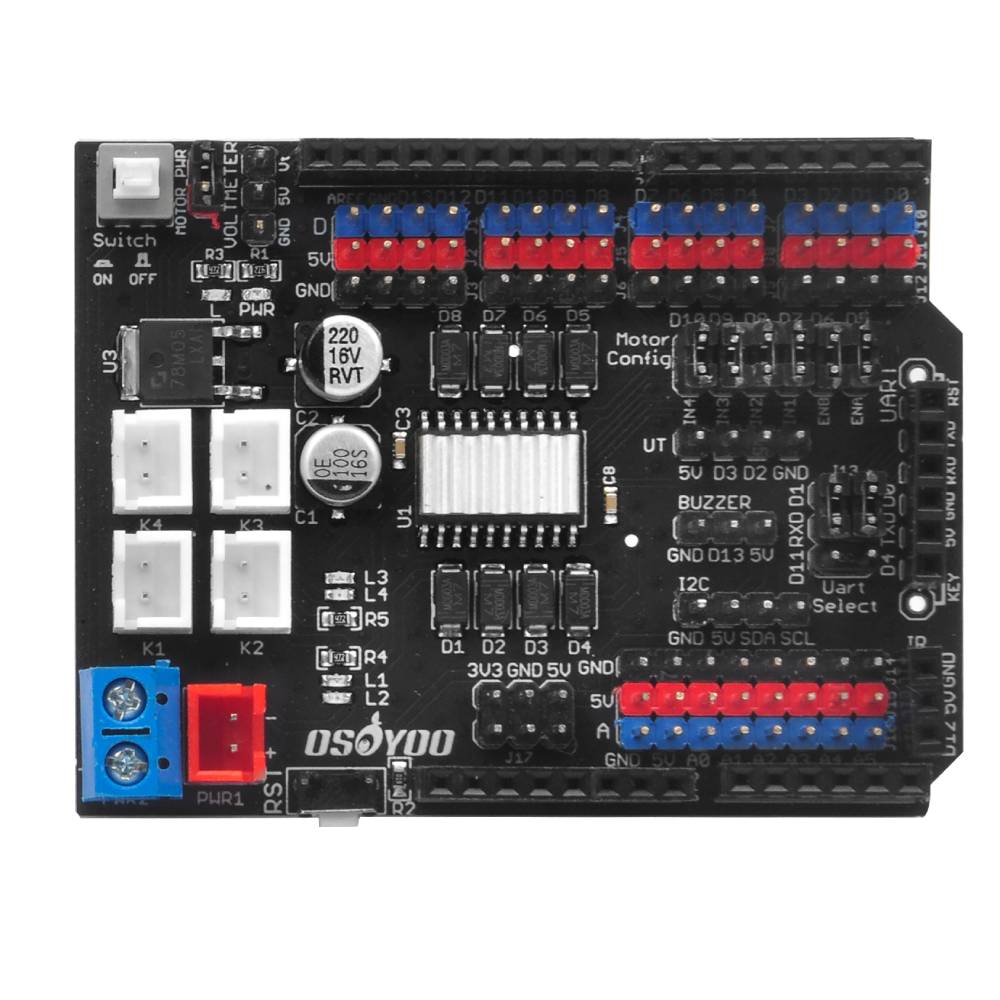
Resumen del hardware:
-
- Interruptor de alimentación: Controla la entrada de energía externa, presiona el interruptor para encender la energía y vuelve a presionar para apagarla.
- Puente Motor PWR: Conecta la tapa del puente, el chip de control del motor funciona normalmente, quita la tapa del puente y deja de funcionar.
- Interfaz del voltímetro: Interfaz de voltímetro digital de tres hilos, muestra el voltaje de la fuente de alimentación externa.
- Salida de pin digital: Conecta las interfaces de señal digital.
- Indicador L: Conectado con el pin de Arduino D13.
- Indicador de potencia:
- Puentes de configuración del motor: cuando el puente está conectado, el pin de control del chip del motor se conecta al puerto io de Arduino correspondiente de forma predeterminada. Si es necesario, también puede quitar la tapa del puente y conectar otros puertos io de Arduino a través de un cable Dupont para controlar el motor. Motor IN1-Arduino D7 Motor IN2-Arduino D8 Motor IN3-Arduino D9 Motor IN4-Arduino D10 Motor ENA-Arduino D5 Motor ENB-Arduino D6
- Interfaz del motor: K1 y K2 (K3 y K4) pueden conectar el Motor A (B) para el motor CC.
- Chip del controlador del motor L293DD
- Indicadores de rotación del motor
- Toma de alimentación externa (toma de alimentación azul/toma de alimentación XH2.54): Fuente de alimentación externa para el escudo del motor, rango de 6-15V.
- Botón de reinicio: Presiona para reiniciar el escudo y Arduino.
- Salida de pin analógica
- Interfaces de sensores: Para facilitar el cableado, diseñamos interfaces correspondientes para los sensores más comúnmente utilizados y los conectamos a los pines de señal de Arduino.
- Interfaz IR: Puede enchufar el receptor IR en esta interfaz para que la placa pueda recibir señales IR, el puerto de señal está conectado al D12 de Arduino de forma predeterminada.
- Interfaz UART: Conecta aquellos pines que permiten la comunicación serial en Arduino.
- Selector UART J13: J13 proporciona una forma conveniente de configurar la interfaz UART. Puede utilizar tapas de puente para conectar TXD y RXD del puerto UART a D4 y D11, es decir, usar el puerto serial suave para comunicarse con el dispositivo conectado al puerto UART. También puede configurarlo como un puerto serial duro, simplemente conecte las tapas de puente al lado D0/D1. El puerto serial duro se utiliza de forma predeterminada. Si necesita utilizar otros pines, puede quitar las tapas de puente y utilizar puentes para conectar TXD y RXD a los pines que permiten la comunicación serial en Arduino.
- Descarga de archivo de pieza Fritzing: https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip








