
Panoramica
Lo Shield motore OSOYOO è basato sul L293DD (datasheet), che è un driver a quattro canali monolitico integrato ad alta tensione e alta corrente progettato per accettare livelli logici standard DTL o TTL e guidare carichi induttivi (come relè, solenoidi, motori DC e passo-passo) e transistor di potenza di commutazione. Per evitare danni alla scheda, tutte le linee del driver sono protette da diodi dalla back EMF. La tensione di alimentazione massima supportata da questa scheda è 20V.
Utilizza un chip L293DD che fornisce una corrente di uscita fino a 1,2A per ogni canale. richiede un’ alimentazione da 6V a 15V per alimentare il motore e include anche un regolatore di tensione a bordo da 5V per alimentare il chip del driver. Consente di guidare due motori DC con la tua scheda Arduino, controllando la velocità e la direzione di ciascuno indipendentemente.
Puoi utilizzare il microcontrollore UNO R3 e aggiungere componenti esterni per completare una varietà di incredibili esperimenti, come la creazione di un robot intelligente fai-da-te. Quando costruisci il tuo robot, è necessario utilizzare la scheda del driver del motore per controllare i motori DC, tuttavia, talvolta è necessario collegare la scheda del driver del motore all’UNO utilizzando molti cavi jumper, abbastanza scomodo.
Lo shield del motore può essere alimentato direttamente dall’Arduino o da una fonte di alimentazione esterna. Si consiglia vivamente di utilizzare un’ alimentazione esterna per alimentare lo shield del motore.
Questa scheda fornisce anche indicatori LED di direzione per entrambi i canali ed è molto utile durante la fase di configurazione per verificare il comportamento del firmware; gli indicatori LED funzionano anche senza applicare un vero motore all’uscita.
Caratteristiche
- Pin out standard per UNO Shield
- Basato sul chip del driver del motore L293DD
- Guida 2 motori DC o 1 Stepper
- Ingresso di alimentazione esterna disponibile
- Interruttore di alimentazione esterna
- Pulsante RST
- Interfacce di alimentazione 5V/3.3V/GND
- Jumper interruttore di alimentazione del driver del motore
- Interfaccia uart hardware/interfaccia uart software
- Interfacce sensori
- Tutti i pin GPIO
- Cablaggio conveniente relativo al motore tramite jumper
- 4 luci indicatrici di direzione
- Dissipatore di calore per una migliore performance
- Funzione di aggiunta di Wifi IoT quando si lavora con il modulo Wifi OSOYOO (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Funzione Bluetooth quando si lavora con il modulo Bluetooth HC-02 (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)ATTENZIONE:
Il Driver IC e il dissipatore di calore possono diventare molto caldi quando si lavora con una corrente superiore a 1000 mA.
Specifiche
- Parte logica della tensione di ingresso VD: 5V
- Tensione di ingresso (raccomandata): 7 ~ 12V
- Tensione di ingresso (limite): 6-20V
- Parte logica della corrente di lavoro Iss: <36mA
- Parte di guida della corrente di funzionamento Io: 1,2A
- Massima dissipazione di potenza: 25W (T = 75 Celsius)
- Livello di ingresso del segnale di controllo: Alto 2,3V basso -0,3V
- Temperatura di lavoro: -25 + 130 Celsius
- Presa di alimentazione a vite: morsettiera a passo 5.0mm
- Clip a cintura e può essere controllato tramite l’accesso al segnale della fila anteriore
- Tipo di guida: driver H-bridge a doppia alimentazione
- Occupazione del pin: D7 ~ D10 guida diretta del motore
- Supporta la velocità del motore in modalità PWM/PLL
- Peso 29 g
- Dimensioni 68,5 x 53 mm
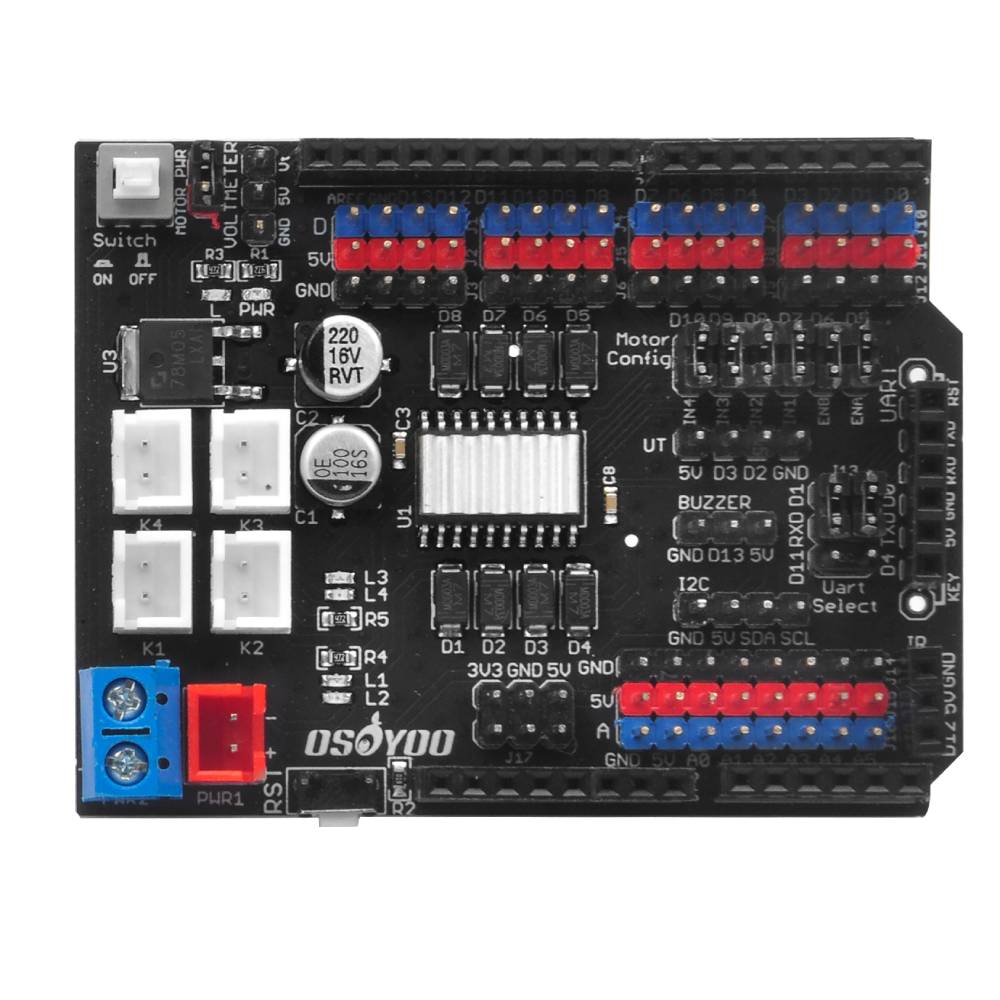
Panoramica dell’Hardware
- Interruttore di alimentazione: controlla l’alimentazione esterna, premi l’interruttore per accendere l’alimentazione, premi nuovamente per spegnere l’alimentazione.
- Jumper di alimentazione del motore: collega il cappuccio del jumper, il chip di guida del motore funziona normalmente, rimuovi il cappuccio del jumper e smette di funzionare.
- Interfaccia VOLTMETER: interfaccia voltmeter digitale a tre fili, visualizza la tensione dell’alimentazione esterna.
- Uscita pin digitale: esce dalle interfacce di segnale digitale.
- Indicatore L: collegato al pin Arduino D13.
- Indicatore PWR:
- Jumper di configurazione del motore: quando il jumper è collegato, il pin di controllo del chip del motore è collegato alla porta io Arduino corrispondente per impostazione predefinita. Se necessario, è possibile anche rimuovere il cappuccio del jumper e collegare altri pin io Arduino tramite cavo Dupont per controllare il motore.
Motore IN1-Arduino D7
Motore IN2-Arduino D8
Motore IN3-Arduino D9
Motore IN4-Arduino D10
Motore ENA-Arduino D5
Motore ENB-Arduino D6
- Interfaccia del motore: K1 e K2 (K3 e K4) possono collegare il motore A(B) per il motore DC.
- Chip del driver del motore L293DD
- Indicatori di rotazione del motore
- Presa di alimentazione esterna (presa di alimentazione blu / presa di alimentazione XH2.54): alimentazione esterna per Motor Shield, intervallo 6-15V.
- Pulsante di reset: premuto per ripristinare il shield e Arduino.
- Uscita pin analogica
- Interfacce per sensori: Per facilitare la cablaggio, abbiamo progettato interfacce corrispondenti per sensori comunemente utilizzati e le abbiamo collegate ai pin di segnale di Arduino.
- Interfaccia IR: Puoi collegare il ricevitore IR a questa interfaccia in modo che la scheda possa ricevere segnali IR, la porta di segnale è collegata per impostazione predefinita al pin D12 di Arduino.
- Interfaccia Uart: Collegare ai pin che consentono la comunicazione seriale su Arduino.
- Selettore Uart J13: J13 fornisce un modo comodo per configurare l’interfaccia Uart. Puoi utilizzare i tappi a salto per collegare TXD e RXD della porta Uart a D4 e D11, cioè utilizzare la porta seriale soft per comunicare con il dispositivo collegato alla porta Uart. Puoi anche impostarlo come porta seriale hard, collegando i tappi a salto al lato D0/D1. La porta seriale hard è utilizzata per impostazione predefinita. Se hai bisogno di utilizzare altri pin, puoi rimuovere i tappi a salto e utilizzare i jumper per collegare TXD e RXD ai pin che consentono la comunicazione seriale su Arduino.
- Download del file di parte Fritzing: https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip








