En este proyecto, haremos un dedo robot inteligente y lo utilizaremos para trasladar una pelota de pingpong a otro lugar. Utilizaremos un sensor de obstáculos (detector de distancia ultrasónico) para detectar la pelota que se acerca. Cuando se detecta una pelota, el dedo recogerá la pelota y el coche la dejará caer a otro lugar, entonces el coche volverá al lugar original para esperar otra pelota.
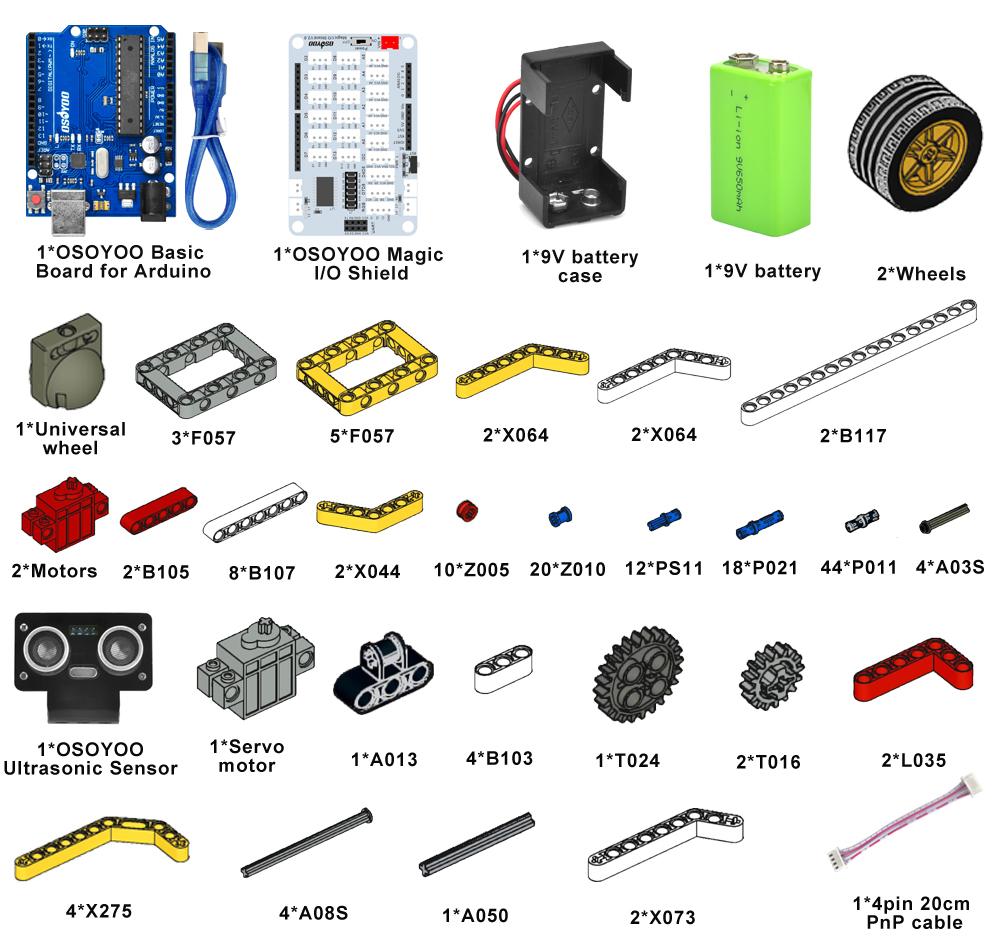
Por favor, prepare las siguientes piezas para completar este proyecto
NOTA:
1.el color del bloque de construcción está sujeto al producto real, que no afecta al uso.
2. TODOS LOS PRODUCTOS OSOYOO PARA ARDUINO SON PLACAS DE TERCEROS TOTALMENTE COMPATIBLES CON ARDUINO.
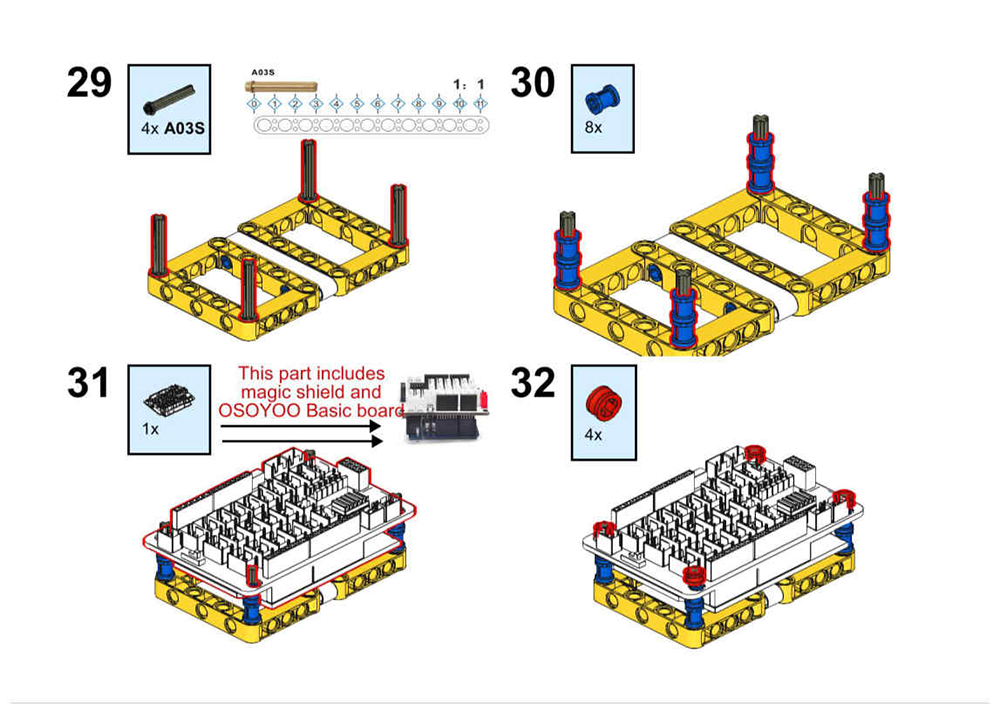
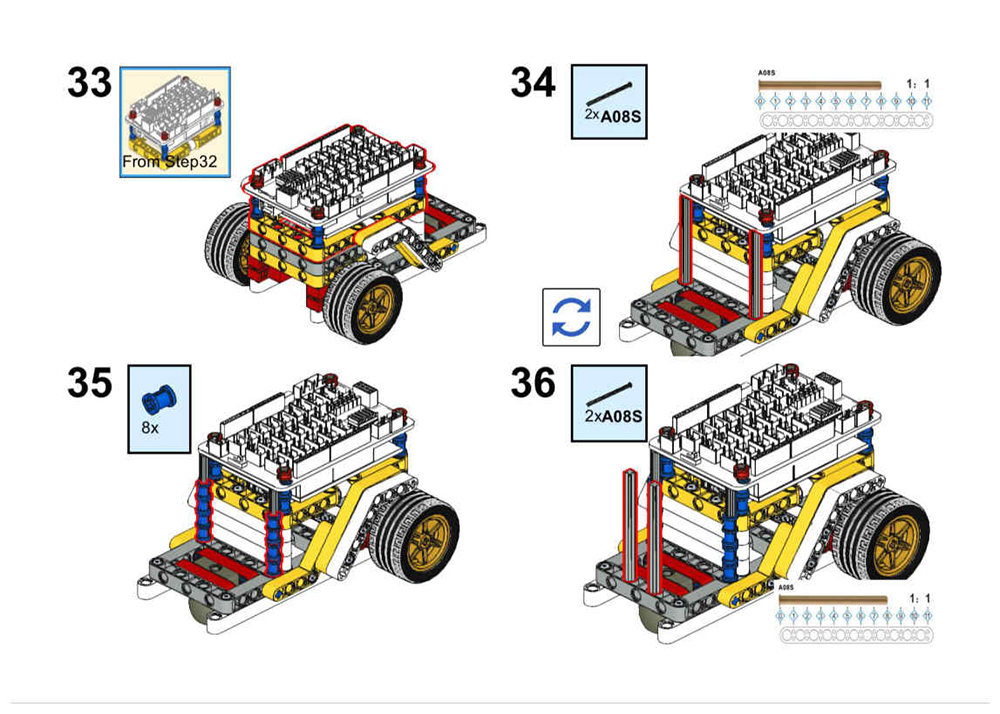
Nota: Si has construido el coche robot de la lección 1, salta al paso 35 de este PDF.
Por favor, conecte los motores y la caja de la batería de 9V como lección1.
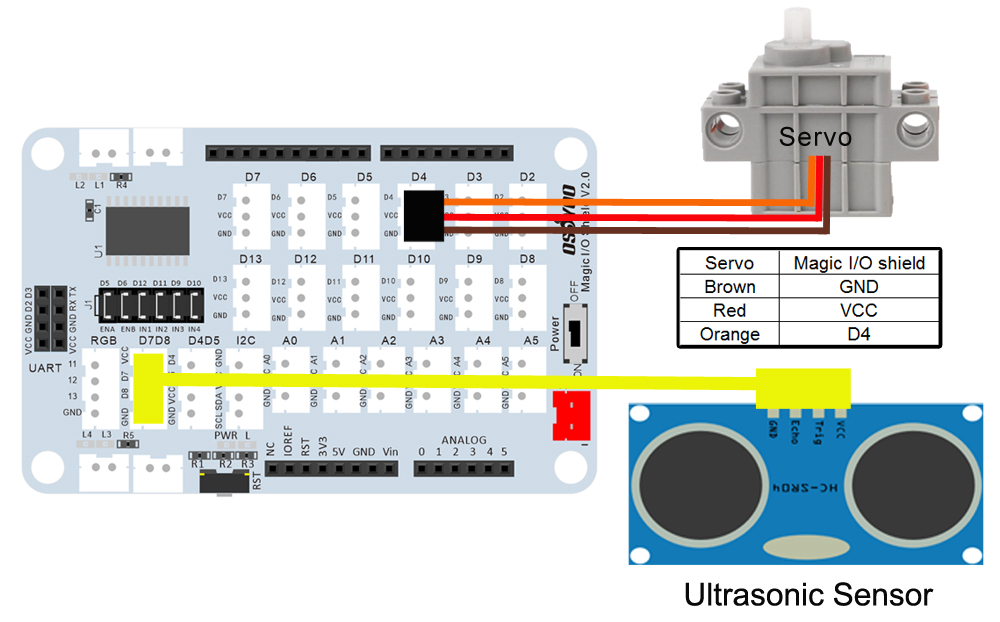
A continuación, conecte el servomotor SG90 al puerto D4 del escudo OSOYOO Magic I/O, el sensor del módulo ultrasónico al puerto D7D8 del escudo Magic I/O con un cable PNP de 4 pines como se indica a continuación:
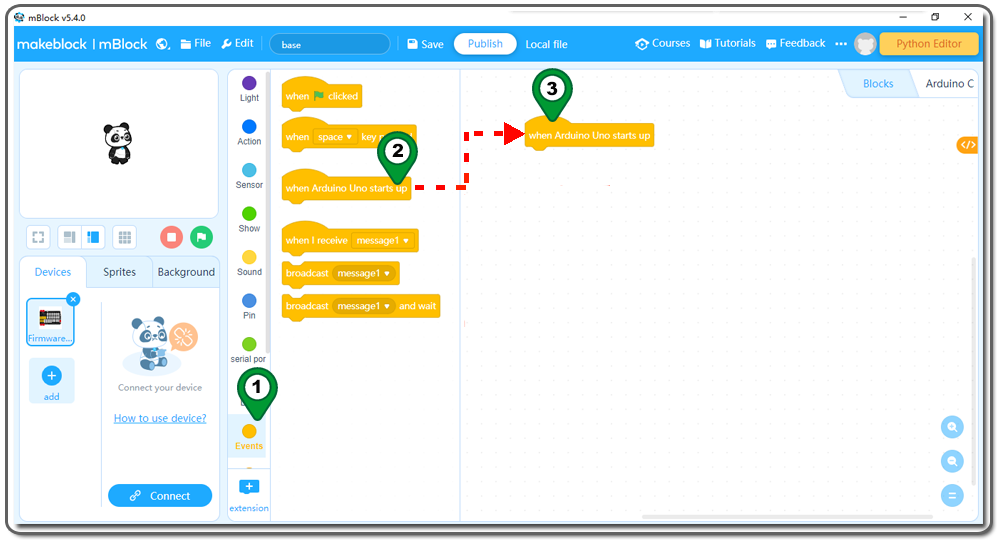
Paso 3) Ejecute el software mBlock PC haciendo doble clic en el icono del adorable Panda. verá la interfaz de usuario mBlock como en la siguiente imagen. Por favor, elimine el dispositivo por defecto CyberPi haciendo clic en la cruz en el círculo rojo.
Paso 4) Arrastra y suelta el archivo osoyoo_uno_mext (descargado en el Paso 2) al software mBlock de la siguiente manera:
Ahora verá un nuevo firmware del dispositivo en mBlock, vea la siguiente imagen:
¡Ahora el software mBlock y el firmware del dispositivo OSOYOO_UNO han sido instalados con éxito en nuestro PC!
Ahora le mostraremos cómo utilizar los bloques para convertir la idea anterior en realidad.
Paso 5: Haz clic en Events, añade el bloque when Arduino Uno starts up a la parte superior:
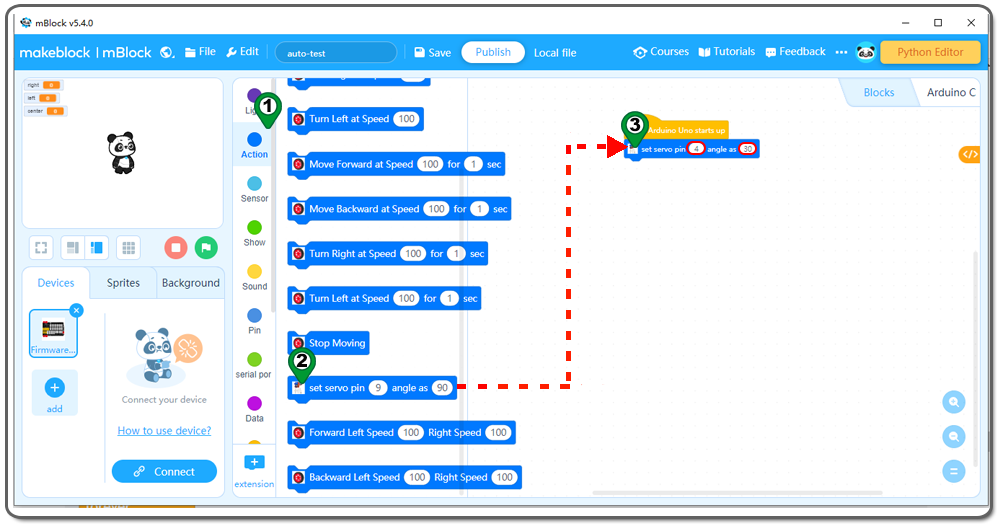
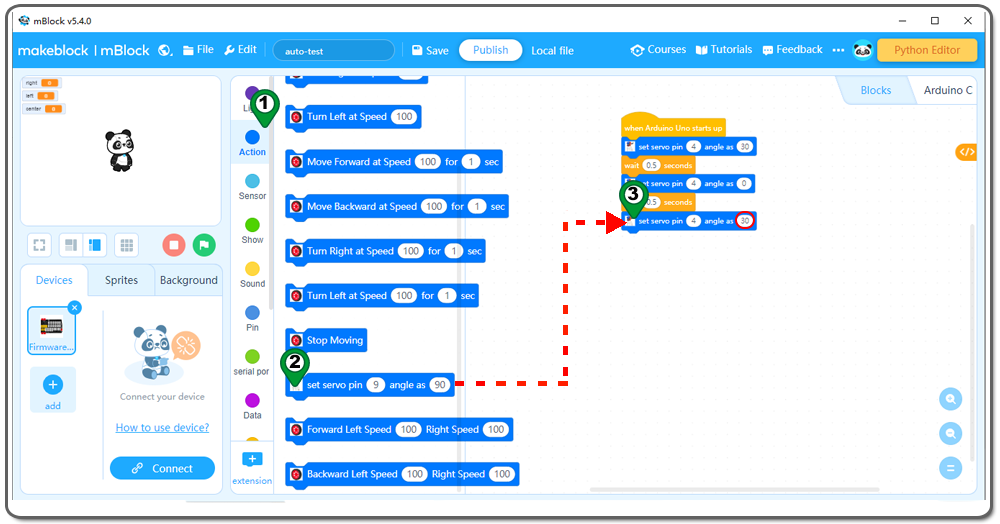
Paso 6: Haga clic en Action y arrastre el bloque set servo pin angle as al área de programación, cambie el pin 9 a 4 y 90 a 30 como se indica a continuación;
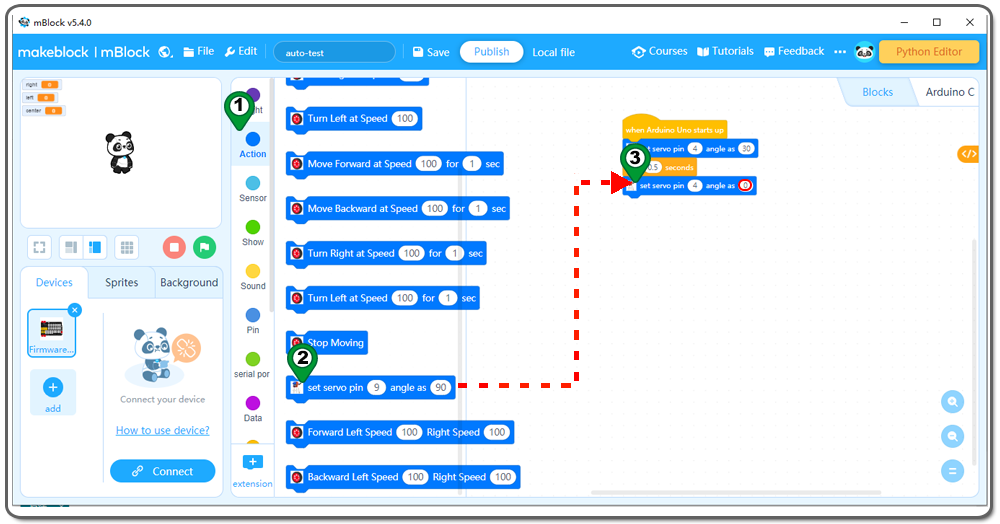
Paso 7: Haga clic en Control, luego arrastre y suelte el bloque wait seconds en el área de programación, escriba 0,5 segundos como se indica a continuación:
Paso 8: Haga clic de nuevo en Action, luego arrastre y suelte el bloque set servo pin angle as en el área de programación ,30 a 0 como se indica a continuación;
Paso 9: Repita el Paso 7 como se indica a continuación:
Paso 10: Haga clic en Action y, a continuación, arrastre y suelte el bloque set servo pin angle as en el área de programación de 0 a 30, como se indica a continuación;
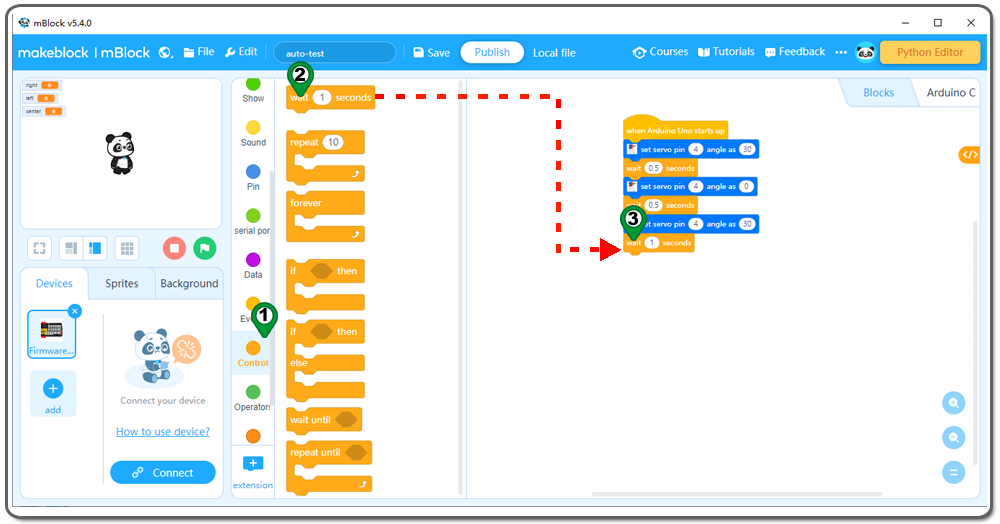
Paso 11: Haga clic en Control, arrastre y suelte el bloque wait seconds en el área de programación y escriba 1 segundo como se indica a continuación:
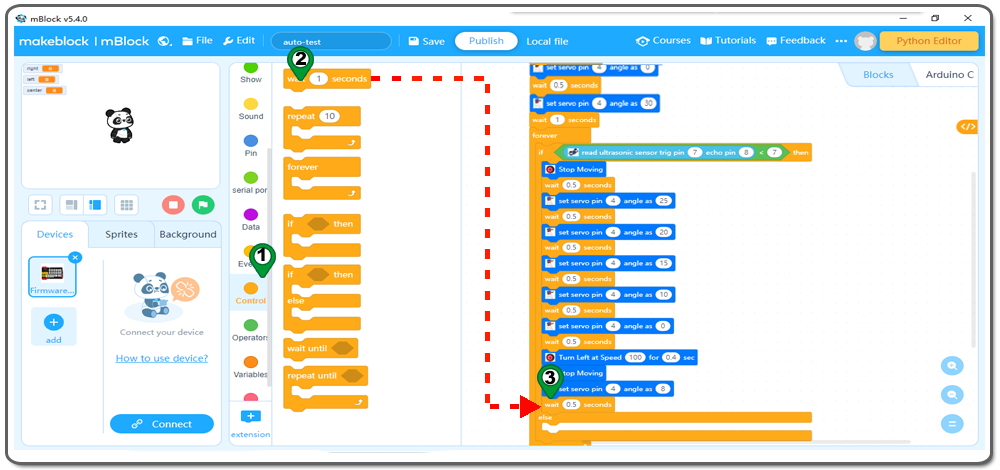
Paso 12: Haga clic en Control, luego arrastre y suelte el bloque forever en el área de programación como se indica a continuación:
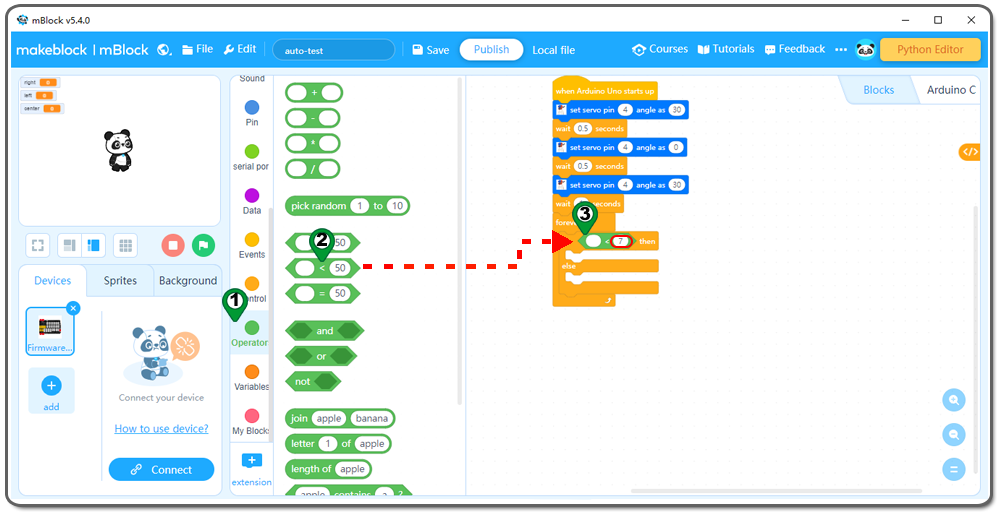
Paso 13: Haga clic en Control de nuevo, luego arrastre y suelte el bloque if then else en el área de programación como se indica a continuación:
Paso 14: Haga clic en Operation, luego arrastre y suelte el bloque 0<0 en el área de programación, cambie el 0 a 7 como se indica a continuación:
Paso 15: Haga clic en Sensor, luego arrastre y suelte el bloque read ultrasonic sensor trig pin echo pin en el área de programación, escriba el pin 7 y el pin 8 como se indica a continuación;
Paso 16: Haga clic en Action , luego arrastre y suelte el bloque Stop Mowing al área de programación como se indica a continuación;
Paso 17: Haga clic en Control y, a continuación, arrastre y suelte el bloque wait seconds en el área de programación:
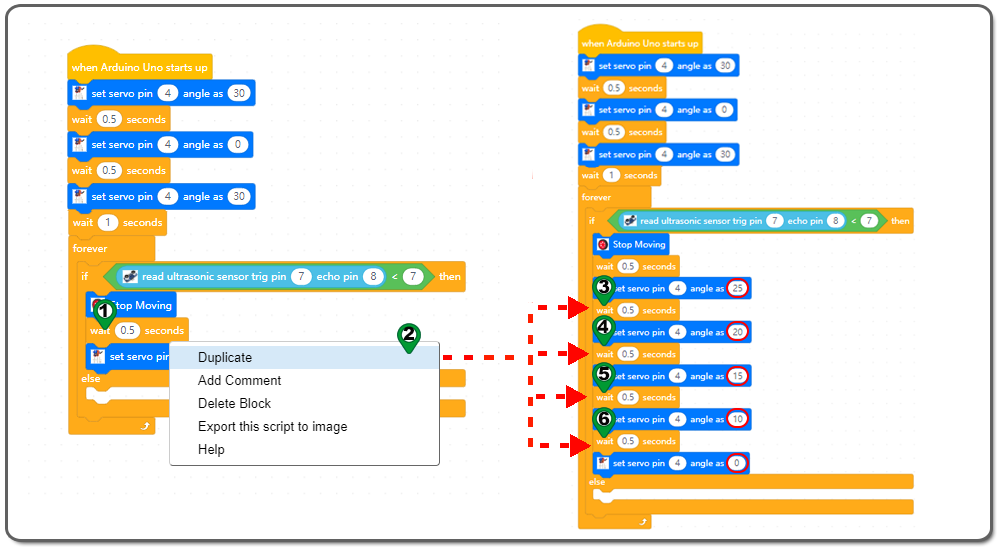
Paso 18: Haga clic en Action y, a continuación, arrastre y suelte el bloque set servo pin angle as en el área de programación de 0 a 25, como se indica a continuación;
Paso 19:Haga click con el boton derecho del raton en el bloque Wait seconds y haga click en duplicar desde el pin de escritura digital al bloque Set servo pin angle as. Obtendra un bloque duplicado y lo colocara detras del bloque B. Cambie el angle value como se muestra en la siguiente figura.
Paso 20: Haga clic en Control, arrastre y suelte el bloque wait seconds en el área de programación y escriba 0,5 segundos como se indica a continuación:
Paso 21: Haga clic en Action, arrastre y suelte el bloque Turn Left Speed for en el área de programación y cambie 1 seg. por 0.4 sec como se indica a continuación;
Paso 22: Haga clic en Action , luego arrastre y suelte el bloque Stop Mowing en el área de programación como se indica a continuación;
Paso 23:Haga click en Action de nuevo, luego arrastre y suelte el bloque set servo pin angle as en el area de programacion ,90 a 0 como sigue;
Paso 24: Haga clic en Control y, a continuación, arrastre y suelte el bloque wait seconds en el área de programación:
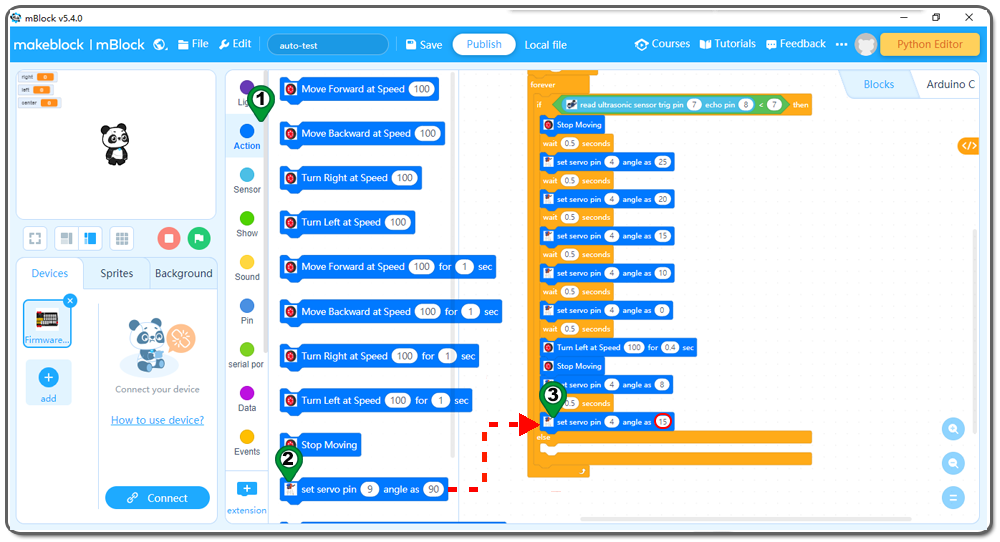
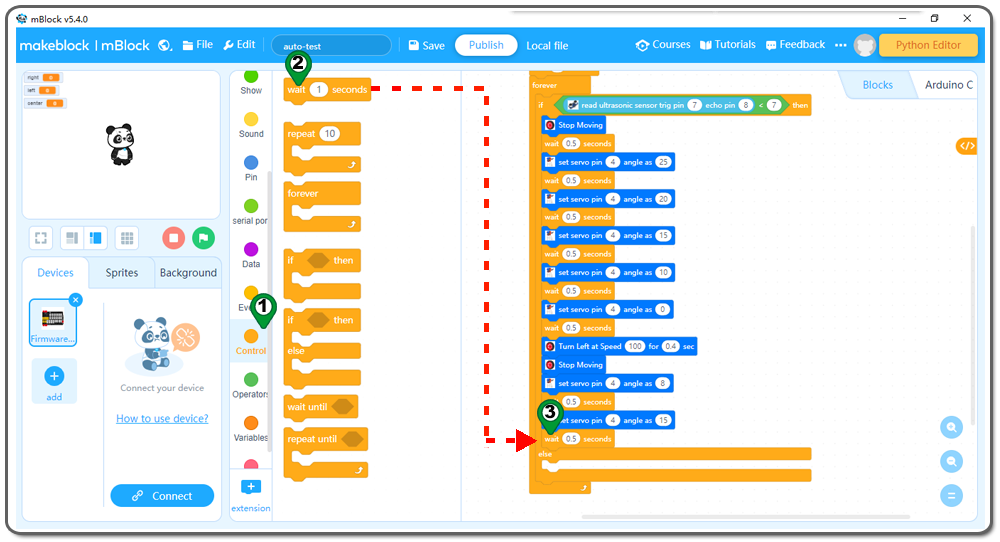
Paso 25: Repita el paso 23, cambie el 90 a 15 como sigue:
Paso 26: Haga clic en Control y, a continuación, arrastre y suelte el bloque wait seconds en el área de programación:
Paso 27:Haga click en Action de nuevo, luego arrastre y suelte el bloque set servo pin angle as al area de programacion ,90 a 30 como sigue;
Paso 28:Haga click en Action , luego arrastre y suelte el bloque Move Backward at speed for sec al area de programacion ,cambie la velocidad de 100 a 50 como se indica a continuacion;
Paso 29: También en Action , arrastre y suelte el bloque Turn Right at speed for sec en el área de programación, cambie la velocidad de 100 a 50, de 1 sec a 0.5 sec como se indica a continuación;
Paso 30: Arrastre y suelte el bloqueMove Forward at speed for sec al área de programación, cambie la velocidad de 100 a 50 como se indica a continuación;
Paso 31: Arrastre y suelte el bloque Forward Left speed Right speed al área de programación, cambie la velocidad 100 a 30 como se indica a continuación;
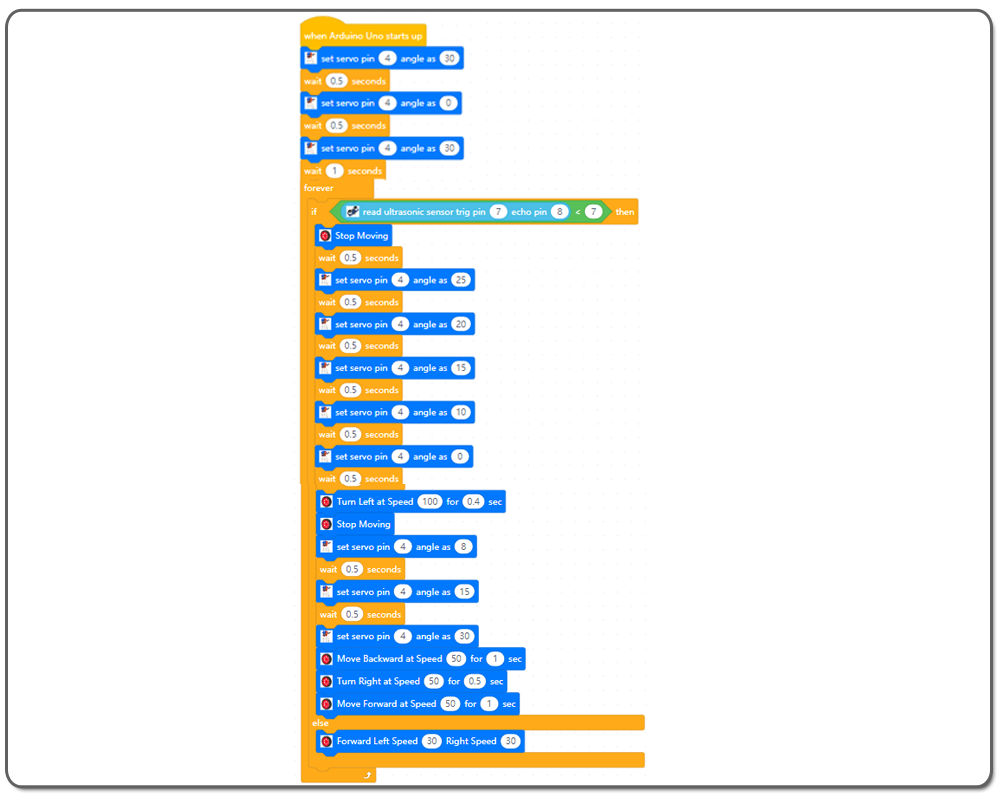
Ahora hemos completado la programación de bloques. Los bloques finales tienen el siguiente aspecto:
Ahora todos los bloques de programación están completos. Desde la imagen de arriba, la lógica es bastante sencillo:
Cuando se inicia Arduino, el ordenador entrará en un bucle muerto que comprobará el estado del botón, cuando el botón no está presionado, el servo se detendrá en la posición original (en mi servo 0 grados) y el ascensor está en el suelo, cuando se pulsa el botón, el brazo del servo girará desde la posición de 0 grados a la posición de 180 grados y el ascensor se eleva al aire.
Paso 32 Cargar el programa en la placa básica OSOYOO
1) Primero, conecte su placa básica OSOYOO a su PC con un cable USB. A continuación, haga clic en el botón Conectar en la parte inferior del software mBlock, verá una ventana USB emergente,
2) marque la casilla Show all connectable device y aparecerá un menú desplegable de dispositivos,
3) seleccione su puerto en el menú desplegable de dispositivos
4) haga clic en el botón Connect para conectar su PC a la placa básica OSOYOO.
5)Después de conectar su PC a la placa base OSOYOO, haga clic en el botón Upload en la parte inferior de su software, entonces el código se cargará en la placa base OSOYOO:
Esta lección no utiliza ningún bloque de programa nuevo. Si no entiende el significado de los bloques, revise las lecciones anteriores.
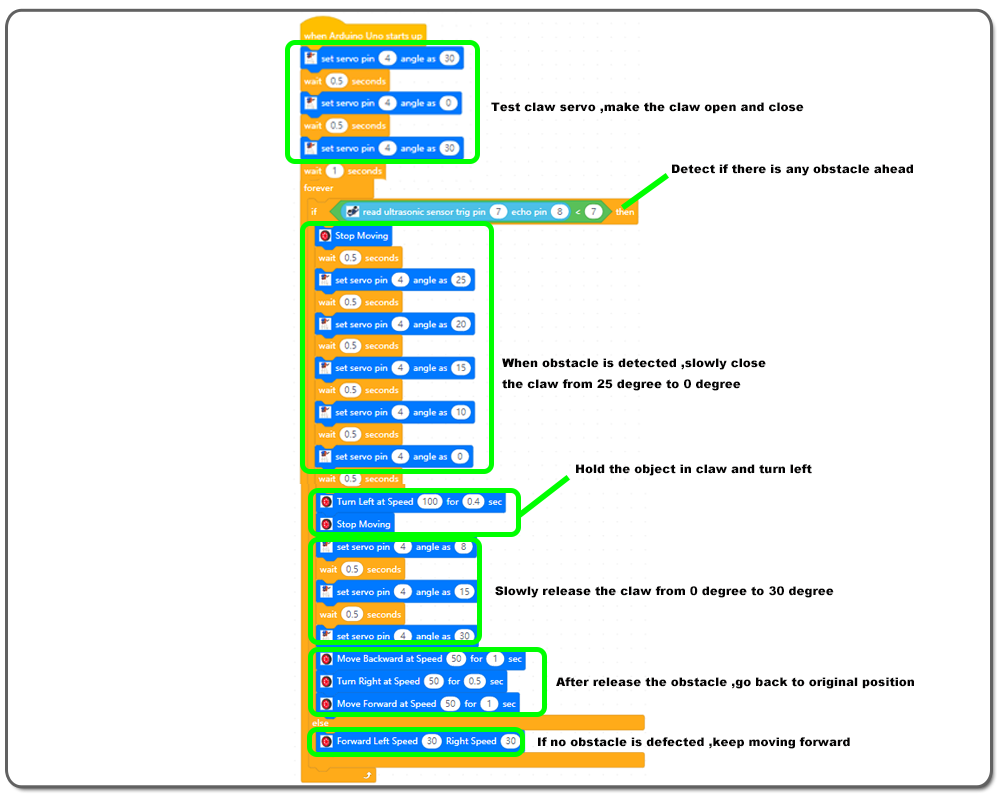
La lógica de programación se explica en el siguiente gráfico:
Primero, el programa hará que el servo rote de 30 grados a 0 grados y luego se detenga en 30 grados. Esto hará que el dedo se abra, se cierre y se abra. Si el dedo no funciona así, es necesario ajustar el dedo en primer lugar.
A continuación, el sensor ultrasónico entra en un bucle para siempre que comprobar si hay obstáculo o no en el camino del coche
Si el sensor ultrasónico detecta un obstáculo en un radio de 7 cm, el coche dejará de moverse durante 0,5 segundos. El servo girará lentamente de estado abierto a cerrado para que el dedo atrape el obstáculo, entonces el coche robot girará a la izquierda a velocidad 100 durante 0.4 segundos, luego se detendrá. El servo girará lentamente del estado cerrado al estado abierto para que el dedo baje el obstáculo, después el coche robot se moverá hacia atrás a velocidad 50 durante 1 segundo, después girará a la derecha a velocidad 50 durante 0,5 segundos, después se moverá hacia delante a velocidad 50 durante 1 segundo.
Si el sensor ultrasónico no detecta ningún obstáculo, el coche avanzará a velocidad 30.
Los bloques de programa anteriores se ejecutan como un bucle eterno a menos que se desconecte la alimentación.
Ajustar la posición de los dedos:
Manualmente:
Después de conectar la alimentación, el dedo se abrirá, luego se cerrará y luego se abrirá de nuevo y permanecerá en posición abierta durante aproximadamente 1 segundo. Si el dedo no se detiene en la posición abierta, por favor desconecte la alimentación, luego saque el servo engranaje y póngalo en una posición en la que ambos dedos estén en posición abierta.
Una vez que haya ajustado el dedo en la posición correcta, vuelva a conectar la alimentación. A continuación, coloque una bola en el dedo abierto. Una vez que el sensor ultrasónico detecte la pelota, la atrapará y la moverá a la posición izquierda. Después de transferir la pelota, el coche volverá a su posición original.
Por código:
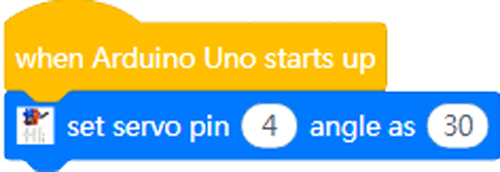
Por favor, cargue el siguiente código en su Arduino. Encienda el aparato y compruebe si el dedo está en posición abierta o no.
Si no, por favor ajuste “30” a otro grado y repita el paso hasta que obtenga el valor correcto.
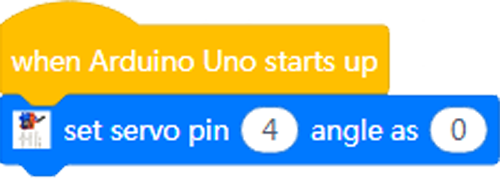
Por favor, cargue el siguiente código en su Arduino. Encienda la alimentación y compruebe si el dedo está en posición cerrada o no.
Si no es así, por favor ajuste “0” a otro grado y repita el paso hasta que obtenga el valor correcto.
Por favor, registre los grados de su dedo robot, y sustituya los grados del código de ejemplo por su valor correcto. para que el código funcione perfectamente.
Resultado del trabajo:
Cuando se enciende y se pone el coche en el suelo, el coche va a ir hacia adelante, cuando hay un obstáculo (por favor, seleccione el obstáculo adecuado de acuerdo con el tamaño del dedo) en su camino, el dedo se captura, y lo puso de distancia) a continuación, seguir adelante. Como el siguiente video: