Esta lección utilizará la herramienta de programación — IDE para Arduino para completar el control del coche robot por WIFI APP. En esta lección, el coche es controlado por el teléfono APP para moverse hacia adelante, hacia atrás, girar a la derecha e izquierda y abrir servo dedo para coger objeto y descargar objeto.
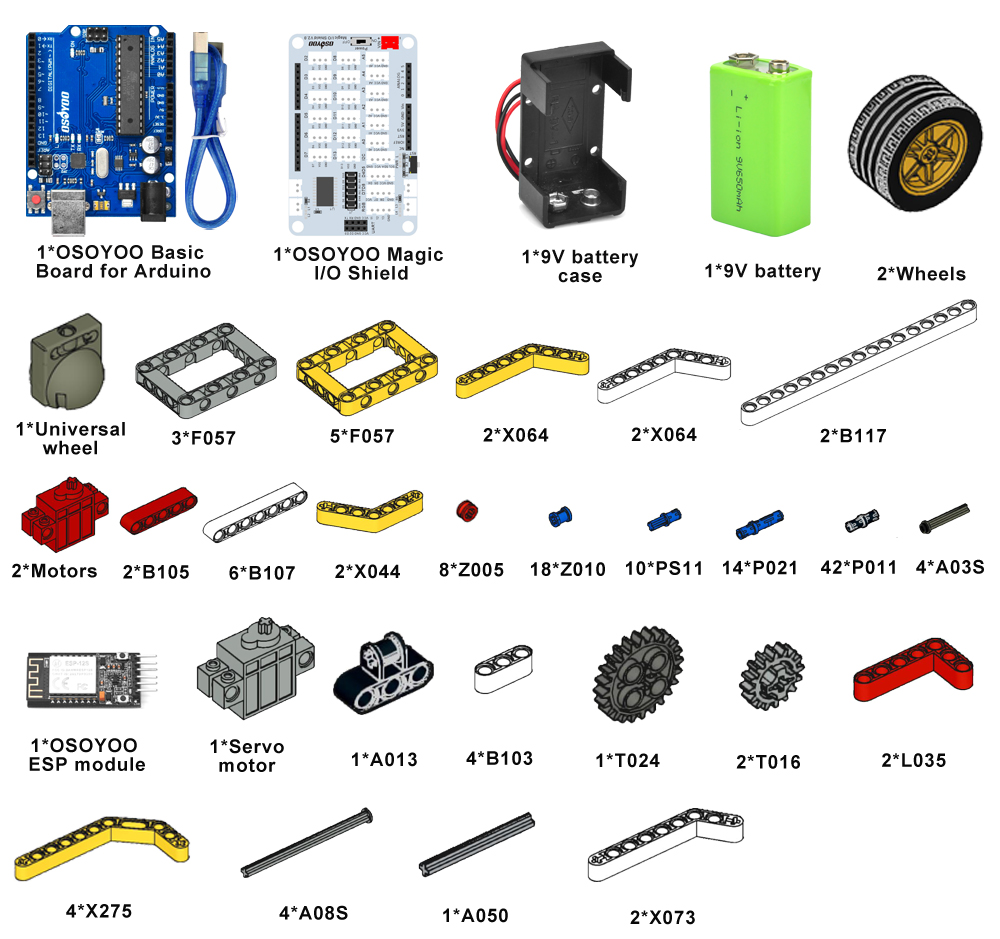
Por favor, prepare las siguientes piezas para completar este proyecto
NOTA:
1.el color del bloque de construcción está sujeto al producto real, que no afecta al uso. 2. TODOS LOS PRODUCTOS OSOYOO PARA ARDUINO SON PLACAS DE TERCEROS TOTALMENTE COMPATIBLES CON ARDUINO
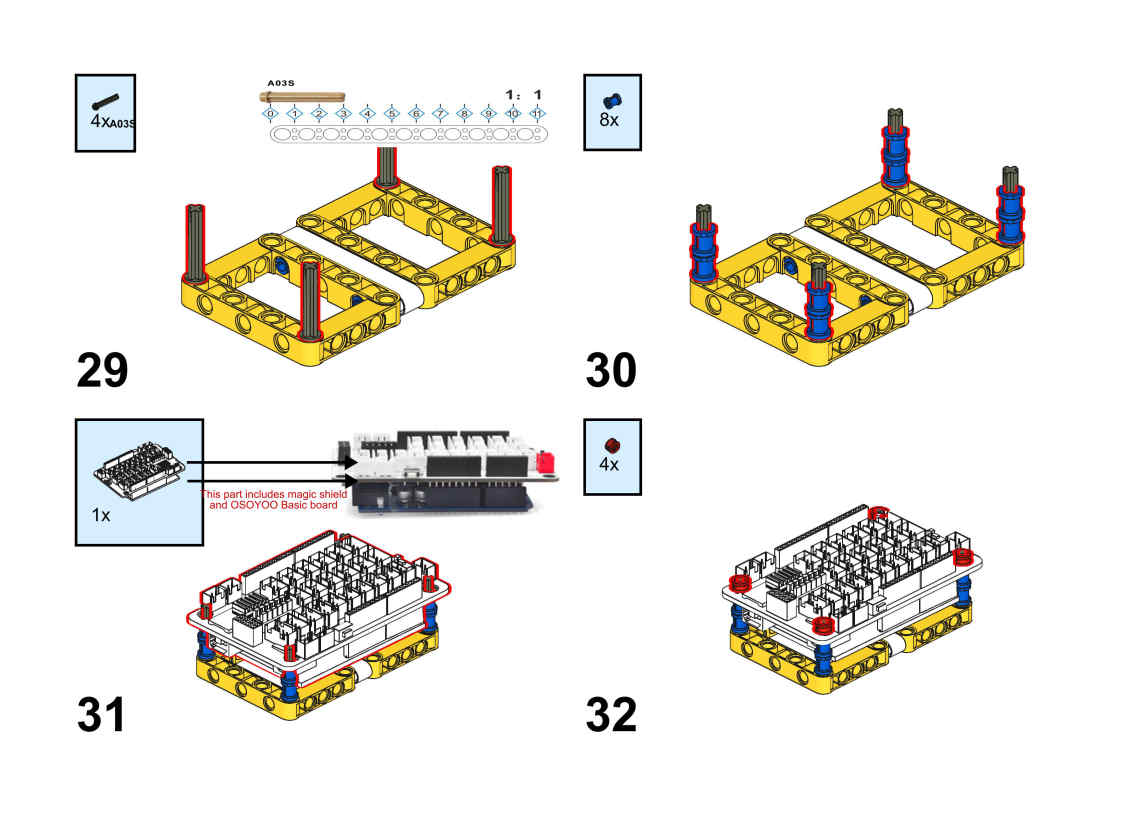
Antes de construir el robot con bloques, por favor instale la placa básica OSOYOO para Arduino bajo el escudo OSOYOO Magic I/O como sigue (Atención por favor: los pines del escudo de E / S se alinean con el puerto de la placa básica en primer lugar, a continuación, presione el escudo firmemente en la placa).
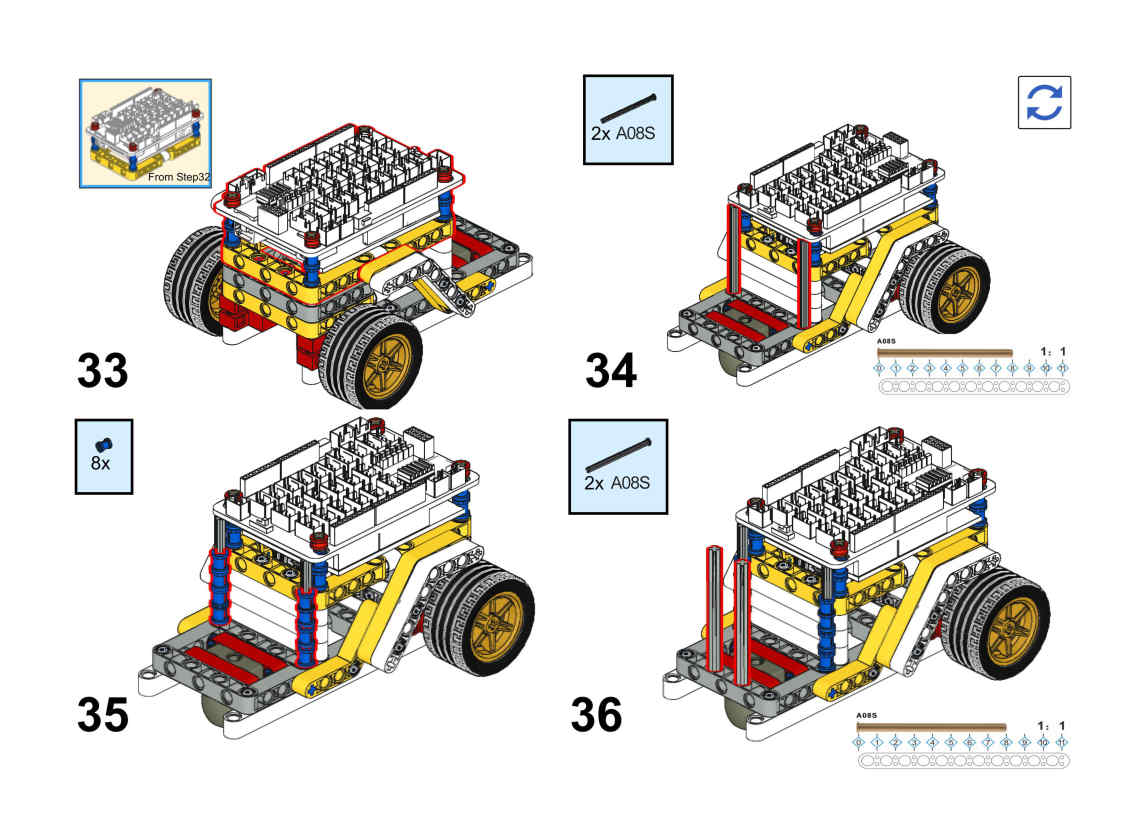
Nota: Si has construido el coche robot de la lección 1, salta al paso 35 de este PDF.
Por favor, conecte los motores y la caja de la batería de 9V como lección1.
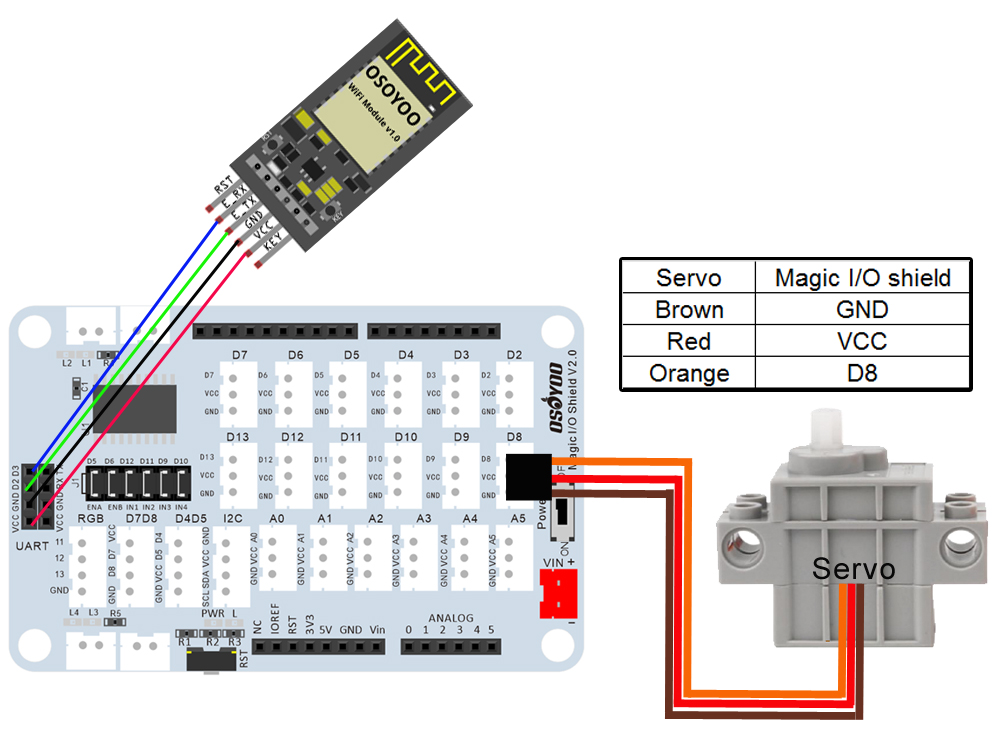
A continuación, conecte los cuatro pines centrales del módulo WIFI OSOYOO a la ranura VCC/GDN/D2/D3 del escudo Magic I/O, conecte el servomotor al puerto D8 de la siguiente manera (Atención: hay seis puentes en ENA/ENB/IN1/IN2/IN3/IN4)
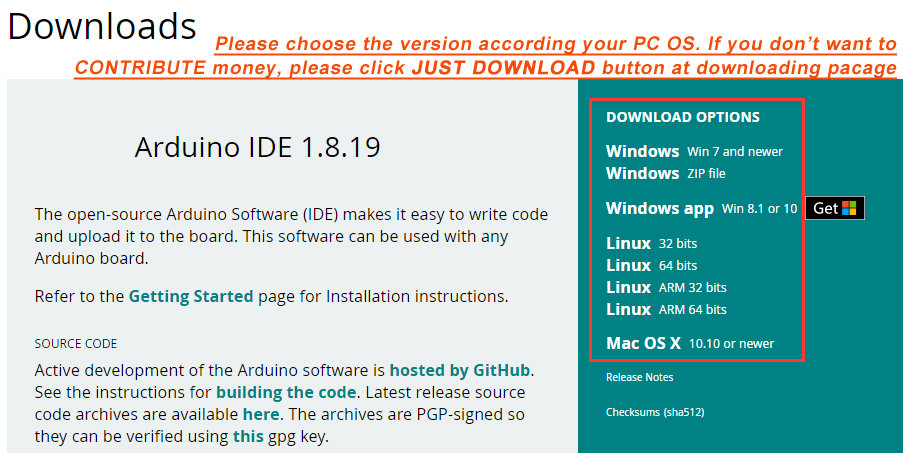
Nota: Esta lección utiliza Arduino IDE como herramienta de programación.
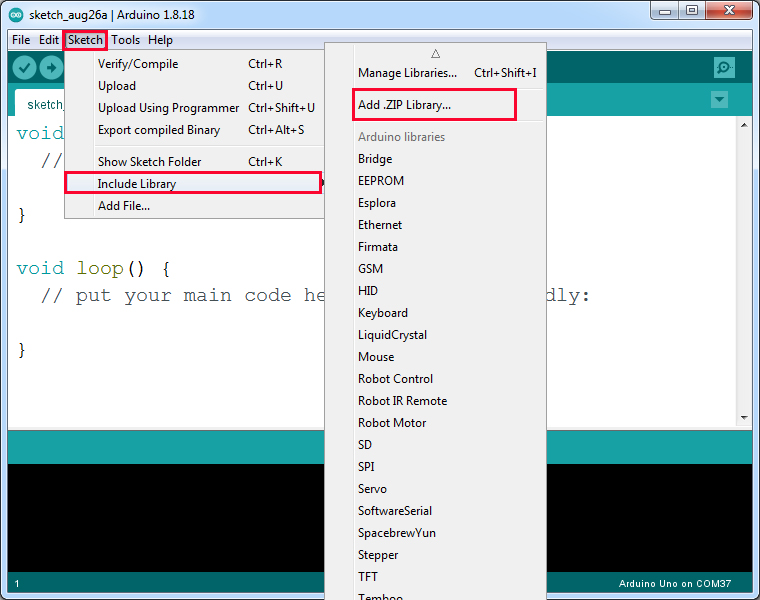
Paso 2: Instalar la librería WifiEsp-master en el IDE (Si ya tiene instalada la librería WifiEsp-master, por favor sáltese este paso)
Descargue la biblioteca WifiEsp-master desde https://osoyoo.com/driver/WiFiEsp-master.zip, luego importar la librería en IDE(Open IDE-> click Sketch->Include Library->Add .Zip Library)
Paso 3: Instalar la librería OsoyooIOT en el IDE (Si ya tienes instalada la librería OsoyooIOT, por favor sáltate este paso)
Descargue la biblioteca OsoyooIOT desde https://osoyoo.com/driver/wifi-iot/OsoyooIOT.zip,a continuación, importar la biblioteca en IDE(Open IDE-> click Sketch->Include Library->Add .Zip Library)
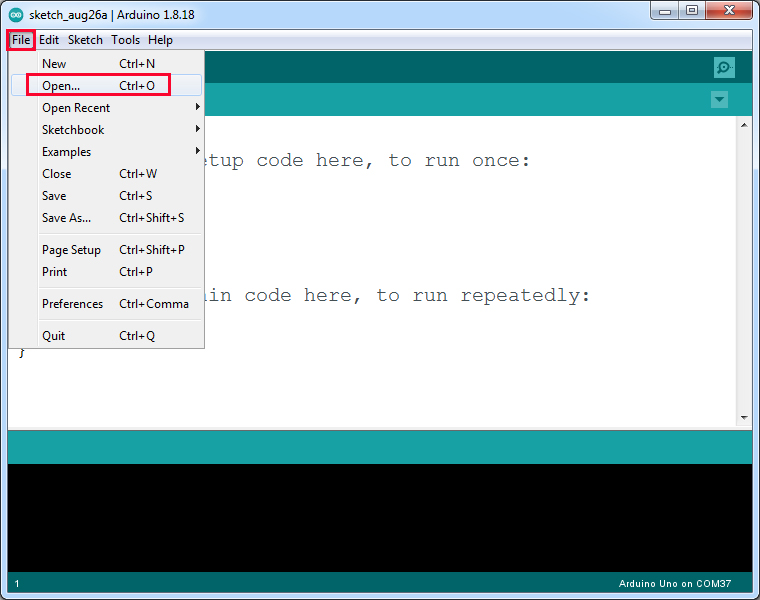
Paso 5: Conectar la placa básica OSOYOO para Arduino al PC con el cable USB, Abrir Arduino IDE -> click file -> click Open-> elegir el código “robot-arm-car.ino” en la carpeta robot-arm-car, cargar el código en arduino. (Aviso: Por favor, apague la alimentación cuando el robot está conectado al ordenador personal o portátil a través del cable USB)
Paso 6: Es necesario cambiar el código de la línea 35 y la línea 36 como su router wifi ssid nombre y contraseña :
char ssid[] = “***”; // replace *** with your router wifi SSID (name) char pass[] = “***”; // replace *** with your router wifi SSID (password)
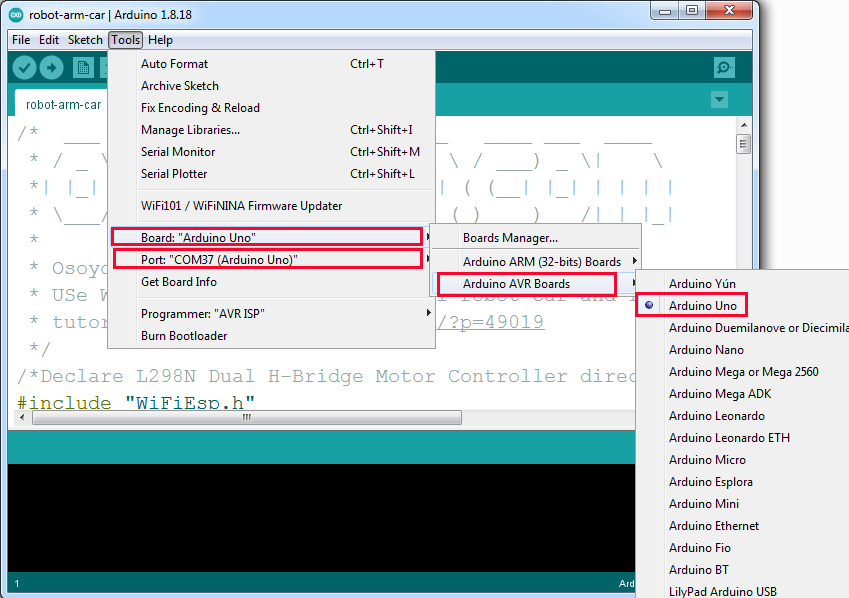
Paso 7: Elige la placa y el puerto correspondientes para tu proyecto, carga el boceto en la placa.
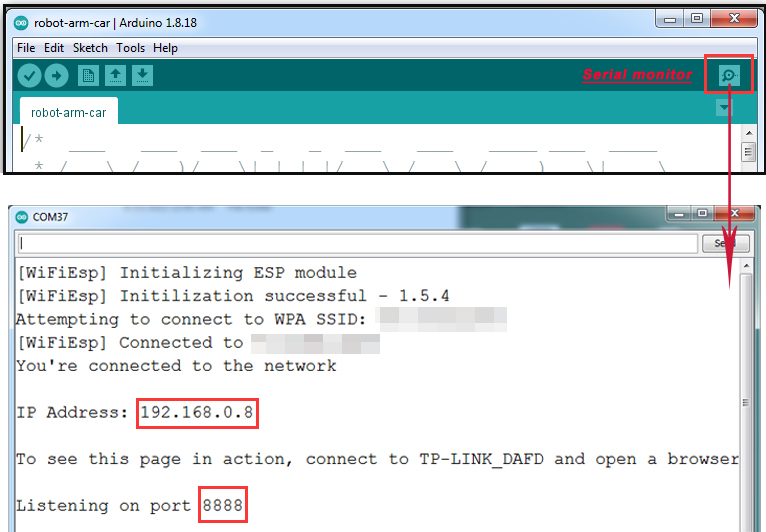
Paso 8: haga clic en la ventana Serial monitor en la esquina superior derecha del IDE, verá el siguiente resultado (Nota: su PC y el robot están conectados a la misma red LAN.):
CONSEJOS:
Si encuentra que la velocidad del coche es lenta o rápida, por favor abra el código y cambie el valor de la línea31 a la línea33 como sigue:
Paso 1) Descargue OSOYOO Iot udp APP buscando OSOYOO Iot udp APP en Apple Store (iPhone/iPad) o Google Play Store (dispositivo Android).(Nota: Si no encuentras esta APP en Google Play, puedes descargar directamente la APP desde el siguiente enlace:https://osoyoo.com/driver/udp-app.apk )
Paso 2): Instale la OSOYOO Iot udp APP en su teléfono y asegúrese de que su teléfono móvil está conectado con la misma red LAN de su coche robot para Arduino.
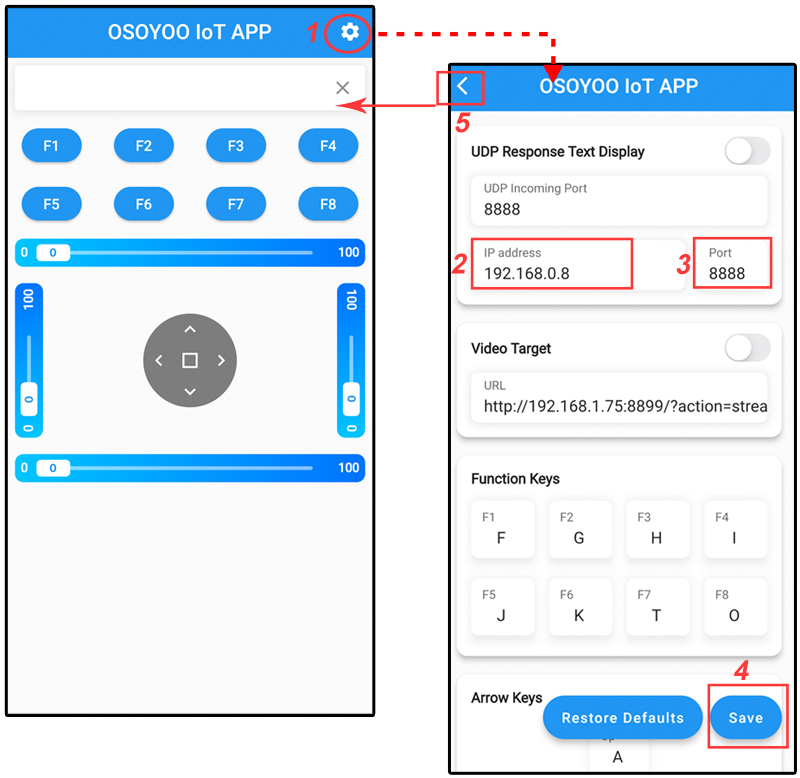
Paso 3): Establezca la dirección IP en la APP 1)Abra la APP y haga clic en el botón Configuración de la esquina superior derecha.
2)Utilice la dirección IP que obtiene en la ventana del monitor serie (para nuestro robot es 192.168.0.8) para reemplazar la IP por defecto 192.168.1.255
3)mantener el número de puerto por defecto 8888 sin cambiar
4)Haz clic en el botón Save para guardar los cambios que acabas de hacer
5)Haga clic en la flecha hacia atrás para volver a la interfaz de usuario frontal de APP.
Puedes usar las teclas de flecha para controlar el movimiento del coche. Acción de los botones de la APP