Introduction
In this less, we’ll teach you how to use Raspberry Pi read data from BMP180 digital pressure sensor.
Hardware Preparation
1 * Raspberry Pi
1 * BMP180 digital pressure sensor
1 * Breadboard
Several jumper wires
1 * T-Extension Board with 40-Pin Cable(Optional)
Software Preparation Note: In this lesson, we remotely control raspberry pi via PuTTy on PC. To learn how to config raspberry pi, please visit lesson 1: getting started with raspberry pi.
Experimental Principle
BMP180 digital pressure sensor can detect pressure, temperature and altitude. We will use Raspberry Pi to input these data from BMP180 sensor through II2 interface, and print the value in the terminal window.
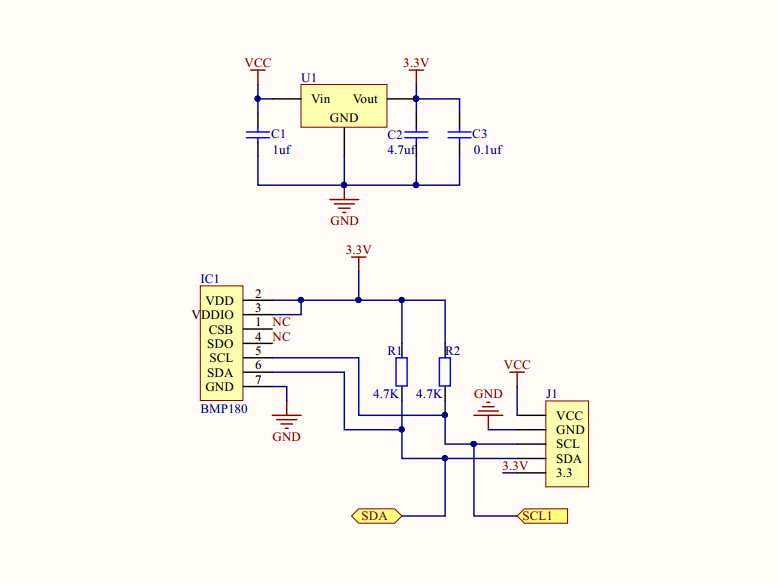
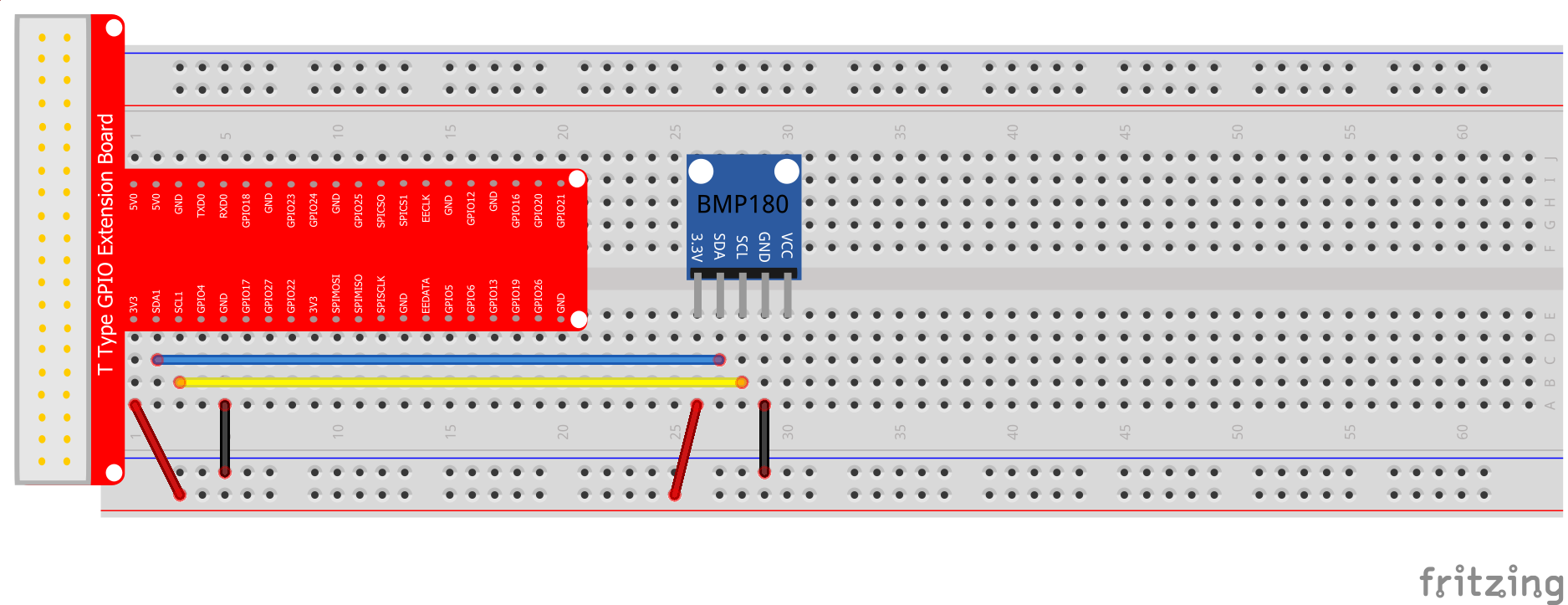
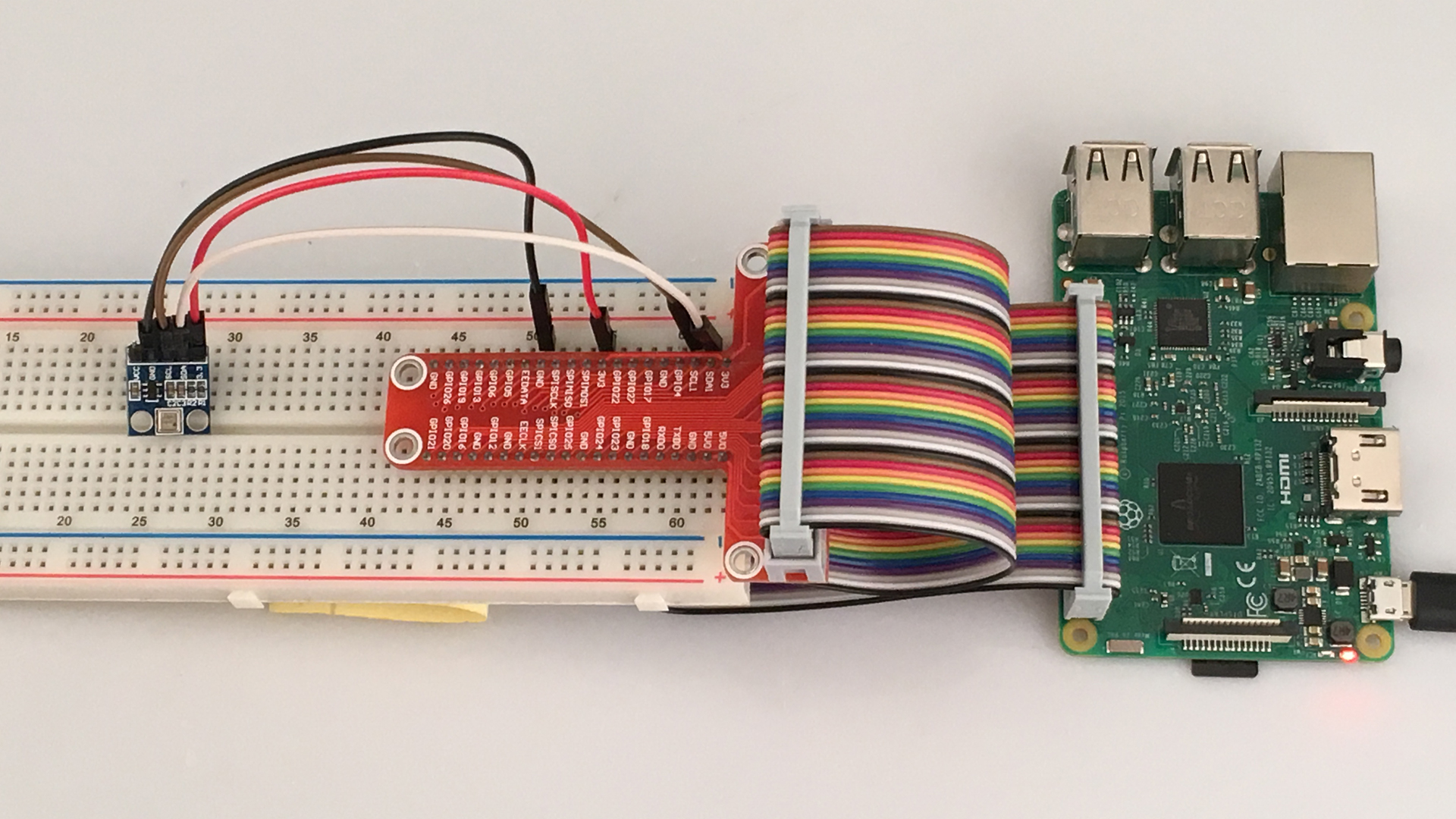
Hardware Setup
Assembling the Circuit as followed Connection Graph
Software
To use the I2C interface, we should enable the I2C first. Please enter the following command:
sudo nano /boot/config.txt
Open the file /boot/config.txt, find the code line”dtparam=i2c_arm”,checking if there is # sign in front of the line, uncomment it (remove the # in front of this line), and make sure the end of the line is”on”, finally the code should look like this:
Press Ctrl+X,and type “Y” to save the file you revised. reboot Pi.
We’ll provide two kinds of codes for C language users and Python language users.
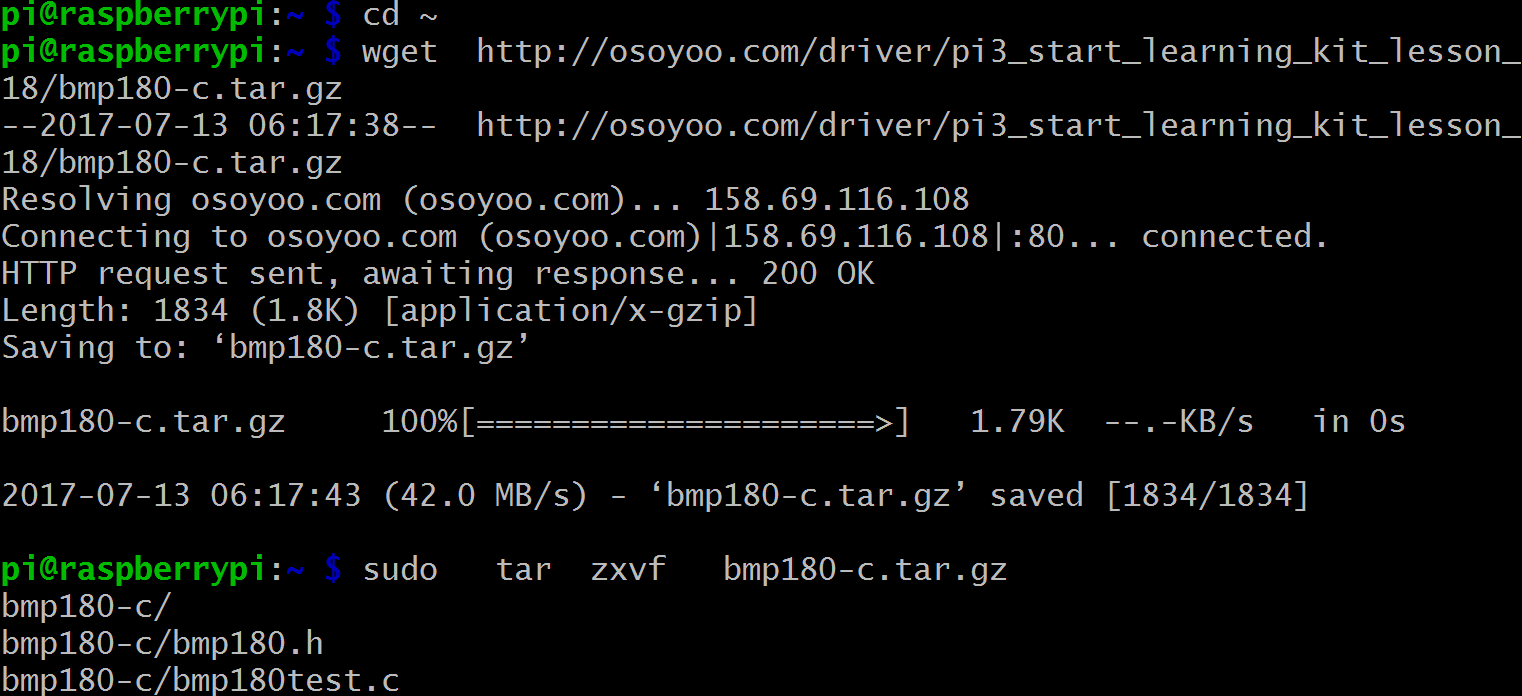
For C language users, please follow the next step:
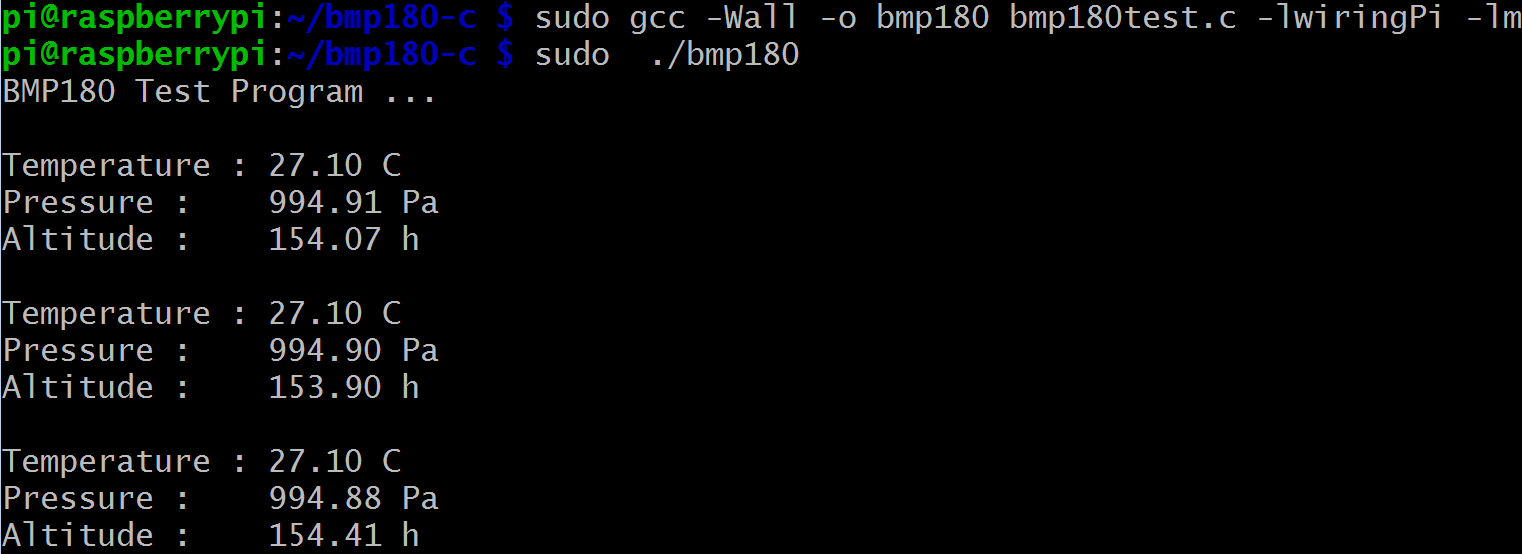
Step 4) Run program sudo ./bmp180 Program result
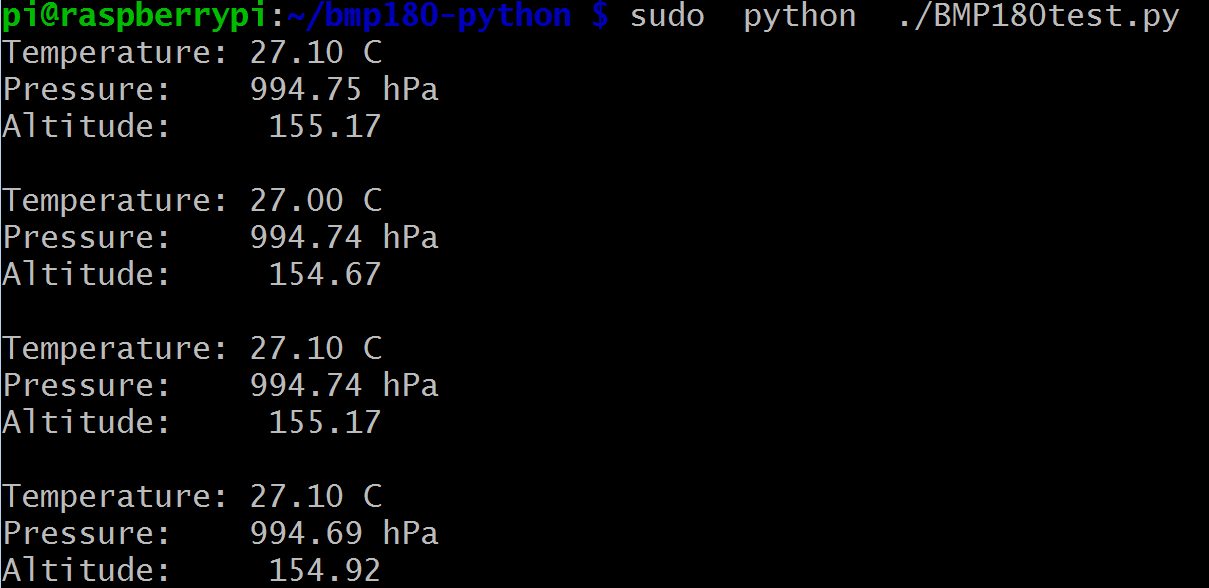
Once the program starts running , the terminal will show pressure, temperature and altitude which BMP180 sensor detects.
Once the program starts running , the terminal will show pressure, temperature and altitude which BMP180 sensor detects.
BMP180.py, BMP180.pyc and BMP180test.py code
import time
import smbus
# BMP085 default address.
BMP180_I2CADDR = 0x77
# Operating Modes
BMP180_ULTRALOWPOWER = 0
BMP180_STANDARD = 1
BMP180_HIGHRES = 2
BMP180_ULTRAHIGHRES = 3
# BMP085 Registers
BMP180_CAL_AC1 = 0xAA # R Calibration data (16 bits)
BMP180_CAL_AC2 = 0xAC # R Calibration data (16 bits)
BMP180_CAL_AC3 = 0xAE # R Calibration data (16 bits)
BMP180_CAL_AC4 = 0xB0 # R Calibration data (16 bits)
BMP180_CAL_AC5 = 0xB2 # R Calibration data (16 bits)
BMP180_CAL_AC6 = 0xB4 # R Calibration data (16 bits)
BMP180_CAL_B1 = 0xB6 # R Calibration data (16 bits)
BMP180_CAL_B2 = 0xB8 # R Calibration data (16 bits)
BMP180_CAL_MB = 0xBA # R Calibration data (16 bits)
BMP180_CAL_MC = 0xBC # R Calibration data (16 bits)
BMP180_CAL_MD = 0xBE # R Calibration data (16 bits)
BMP180_CONTROL = 0xF4
BMP180_TEMPDATA = 0xF6
BMP180_PRESSUREDATA = 0xF6
# Commands
BMP180_READTEMPCMD = 0x2E
BMP180_READPRESSURECMD = 0x34
class BMP180(object):
def __init__(self, address=BMP180_I2CADDR, mode=BMP180_STANDARD):
self._mode = mode
self._address = address
self._bus = smbus.SMBus(1)
# Load calibration values.
self._load_calibration()
def _read_byte(self,cmd):
return self._bus.read_byte_data(self._address,cmd)
def _read_u16(self,cmd):
MSB = self._bus.read_byte_data(self._address,cmd)
LSB = self._bus.read_byte_data(self._address,cmd+1)
return (MSB << 8) + LSB def _read_s16(self,cmd): result = self._read_u16(cmd) if result > 32767:result -= 65536
return result
def _write_byte(self,cmd,val):
self._bus.write_byte_data(self._address,cmd,val)
def _load_calibration(self):
"load calibration"
self.cal_AC1 = self._read_s16(BMP180_CAL_AC1) # INT16
self.cal_AC2 = self._read_s16(BMP180_CAL_AC2) # INT16
self.cal_AC3 = self._read_s16(BMP180_CAL_AC3) # INT16
self.cal_AC4 = self._read_u16(BMP180_CAL_AC4) # UINT16
self.cal_AC5 = self._read_u16(BMP180_CAL_AC5) # UINT16
self.cal_AC6 = self._read_u16(BMP180_CAL_AC6) # UINT16
self.cal_B1 = self._read_s16(BMP180_CAL_B1) # INT16
self.cal_B2 = self._read_s16(BMP180_CAL_B2) # INT16
self.cal_MB = self._read_s16(BMP180_CAL_MB) # INT16
self.cal_MC = self._read_s16(BMP180_CAL_MC) # INT16
self.cal_MD = self._read_s16(BMP180_CAL_MD) # INT16
def read_raw_temp(self):
"""Reads the raw (uncompensated) temperature from the sensor."""
self._write_byte(BMP180_CONTROL, BMP180_READTEMPCMD)
time.sleep(0.005) # Wait 5ms
MSB = self._read_byte(BMP180_TEMPDATA)
LSB = self._read_byte(BMP180_TEMPDATA+1)
raw = (MSB << 8) + LSB
return raw
def read_raw_pressure(self):
"""Reads the raw (uncompensated) pressure level from the sensor."""
self._write_byte(BMP180_CONTROL, BMP180_READPRESSURECMD + (self._mode << 6))
if self._mode == BMP180_ULTRALOWPOWER:
time.sleep(0.005)
elif self._mode == BMP180_HIGHRES:
time.sleep(0.014)
elif self._mode == BMP180_ULTRAHIGHRES:
time.sleep(0.026)
else:
time.sleep(0.008)
MSB = self._read_byte(BMP180_PRESSUREDATA)
LSB = self._read_byte(BMP180_PRESSUREDATA+1)
XLSB = self._read_byte(BMP180_PRESSUREDATA+2)
raw = ((MSB << 16) + (LSB << 8) + XLSB) >> (8 - self._mode)
return raw
def read_temperature(self):
"""Gets the compensated temperature in degrees celsius."""
UT = self.read_raw_temp()
X1 = ((UT - self.cal_AC6) * self.cal_AC5) >> 15
X2 = (self.cal_MC << 11) / (X1 + self.cal_MD) B5 = X1 + X2 temp = ((B5 + 8) >> 4) / 10.0
return temp
def read_pressure(self):
"""Gets the compensated pressure in Pascals."""
UT = self.read_raw_temp()
UP = self.read_raw_pressure()
X1 = ((UT - self.cal_AC6) * self.cal_AC5) >> 15
X2 = (self.cal_MC << 11) / (X1 + self.cal_MD) B5 = X1 + X2 # Pressure Calculations B6 = B5 - 4000 X1 = (self.cal_B2 * (B6 * B6) >> 12) >> 11
X2 = (self.cal_AC2 * B6) >> 11
X3 = X1 + X2
B3 = (((self.cal_AC1 * 4 + X3) << self._mode) + 2) / 4 X1 = (self.cal_AC3 * B6) >> 13
X2 = (self.cal_B1 * ((B6 * B6) >> 12)) >> 16
X3 = ((X1 + X2) + 2) >> 2
B4 = (self.cal_AC4 * (X3 + 32768)) >> 15
B7 = (UP - B3) * (50000 >> self._mode)
if B7 < 0x80000000: p = (B7 * 2) / B4 else: p = (B7 / B4) * 2 X1 = (p >> 8) * (p >> 8)
X1 = (X1 * 3038) >> 16
X2 = (-7357 * p) >> 16
p = p + ((X1 + X2 + 3791) >> 4)
return p
def read_altitude(self, sealevel_pa=101325.0):
"""Calculates the altitude in meters."""
# Calculation taken straight from section 3.6 of the datasheet.
pressure = float(self.read_pressure())
altitude = 44330.0 * (1.0 - pow(pressure / sealevel_pa, (1.0/5.255)))
return altitude
def read_sealevel_pressure(self, altitude_m=0.0):
"""Calculates the pressure at sealevel when given a known altitude in
meters. Returns a value in Pascals."""
pressure = float(self.read_pressure())
p0 = pressure / pow(1.0 - altitude_m/44330.0, 5.255)
return p0
import time
from BMP180 import BMP180
# Initialise the BMP085 and use STANDARD mode (default value)
# bmp = BMP085(0x77, debug=True)
bmp = BMP180()
# To specify a different operating mode, uncomment one of the following:
# bmp = BMP085(0x77, 0) # ULTRALOWPOWER Mode
# bmp = BMP085(0x77, 1) # STANDARD Mode
# bmp = BMP085(0x77, 2) # HIRES Mode
# bmp = BMP085(0x77, 3) # ULTRAHIRES Mode
while True:
temp = bmp.read_temperature()
# Read the current barometric pressure level
pressure = bmp.read_pressure()
# To calculate altitude based on an estimated mean sea level pressure
# (1013.25 hPa) call the function as follows, but this won't be very accurate
altitude = bmp.read_altitude()
# To specify a more accurate altitude, enter the correct mean sea level
# pressure level. For example, if the current pressure level is 1023.50 hPa
# enter 102350 since we include two decimal places in the integer value
# altitude = bmp.readAltitude(102350)
print "Temperature: %.2f C" % temp
print "Pressure: %.2f hPa" % (pressure / 100.0)
print "Altitude: %.2f\n" % altitude
time.sleep(2)