In questa lezione, devi completare la lezione 4 prima di continuare con questa lezione. Usiamo il modulo ultrasonico per “vedere” gli ostacoli e misurare la distanza. Se la distanza è inferiore al valore soglia predefinito, il buzzer emetterà un segnale acustico e l’auto si girerà automaticamente intorno all’ostacolo.
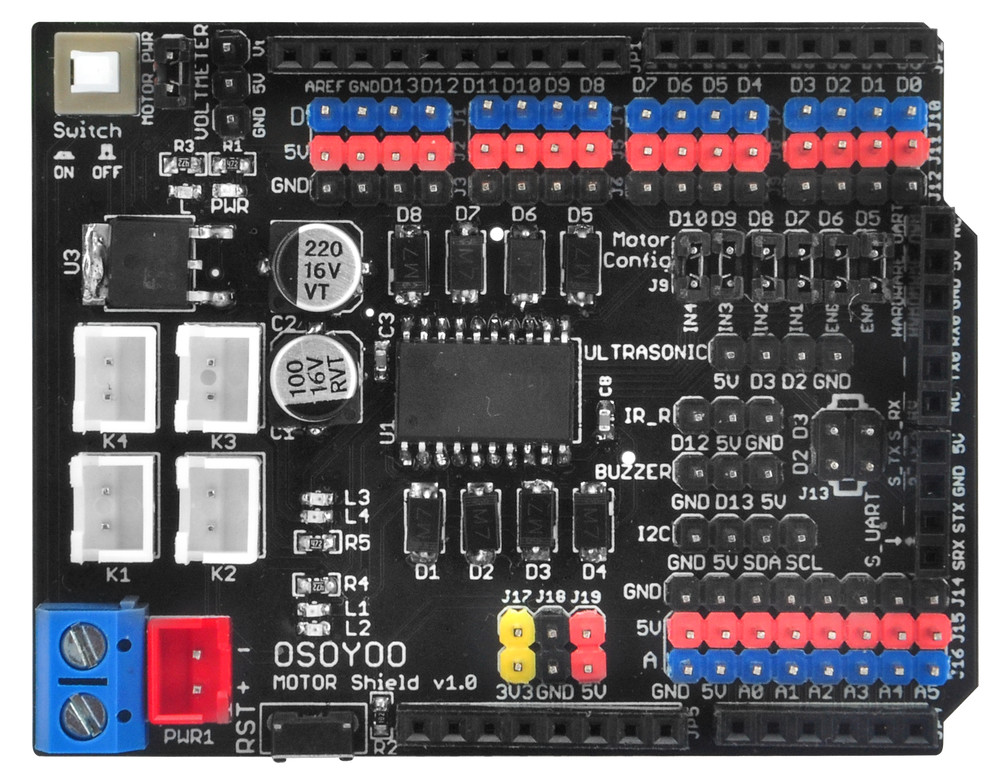
Installazione hardware
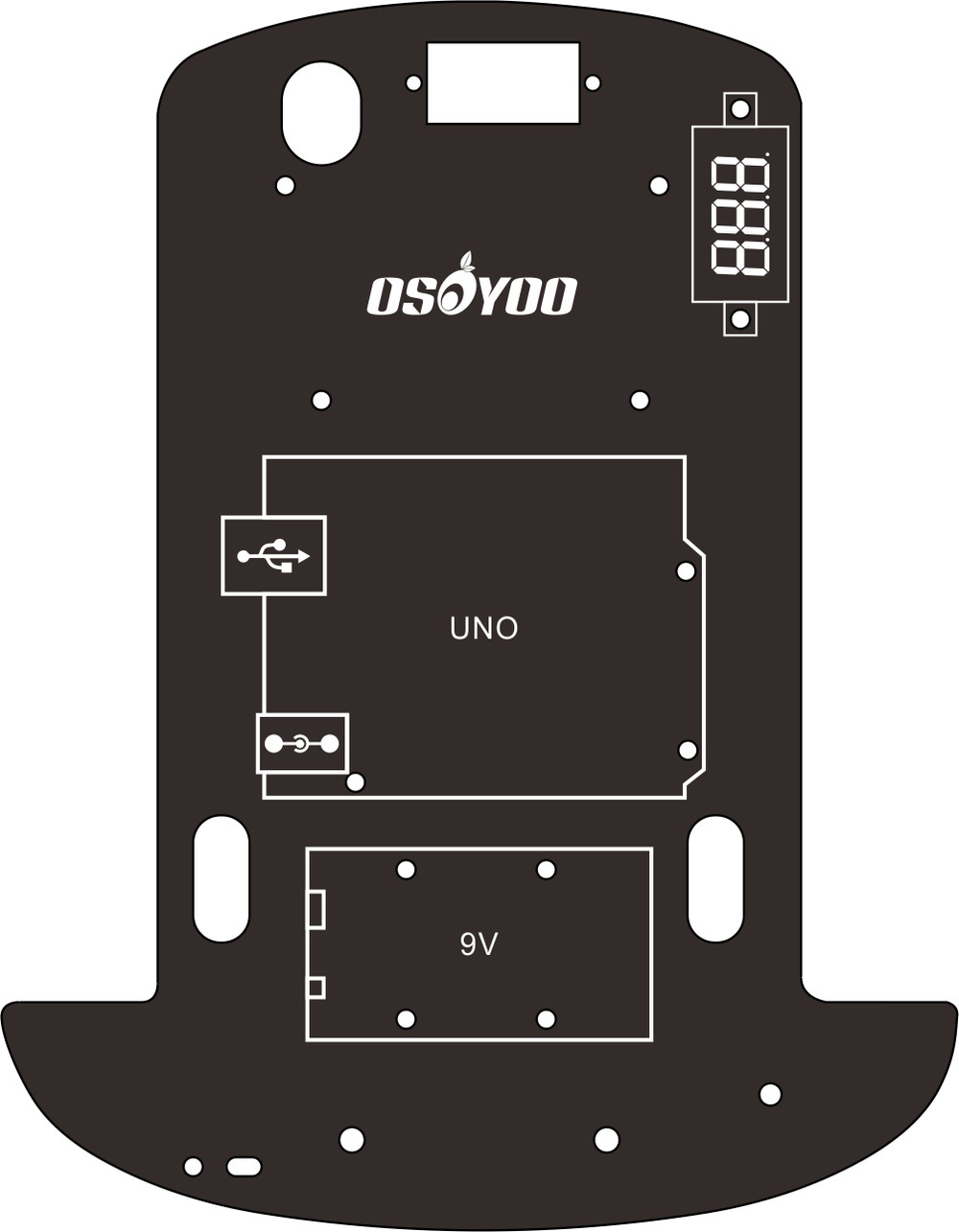
Installa il framework di base per l’auto intelligente come indicato nella lezione 4. Se hai già completato l’installazione nella Lezione 4, mantienilo così com’è.
Scarica Lesson 5 simple code , scompattalo, vedrai una cartella chiamata lesson-5
Passo 3:
Collega la scheda OSOYOO Basic Board per Arduino al PC tramite cavo USB, apri l’IDE -> clicca su file -> clicca su Apri -> scegli il codice “lesson5.ino” nella cartella lesson5, carica il codice sulla scheda.
Nota: spegni la batteria o scollega l’adattatore di alimentazione durante il caricamento
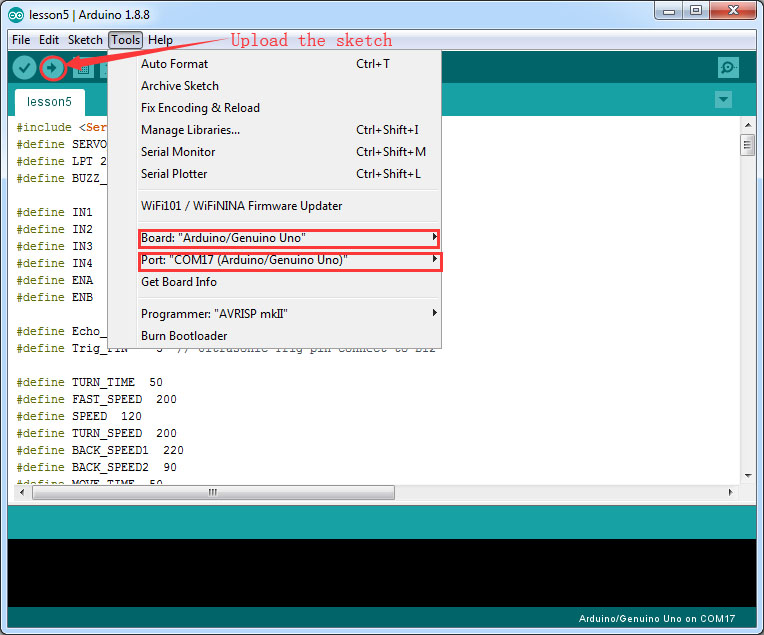
Passo 4:
Scegli la scheda e la porta corrispondenti al tuo progetto, carica lo sketch sulla scheda.
Passo 5:
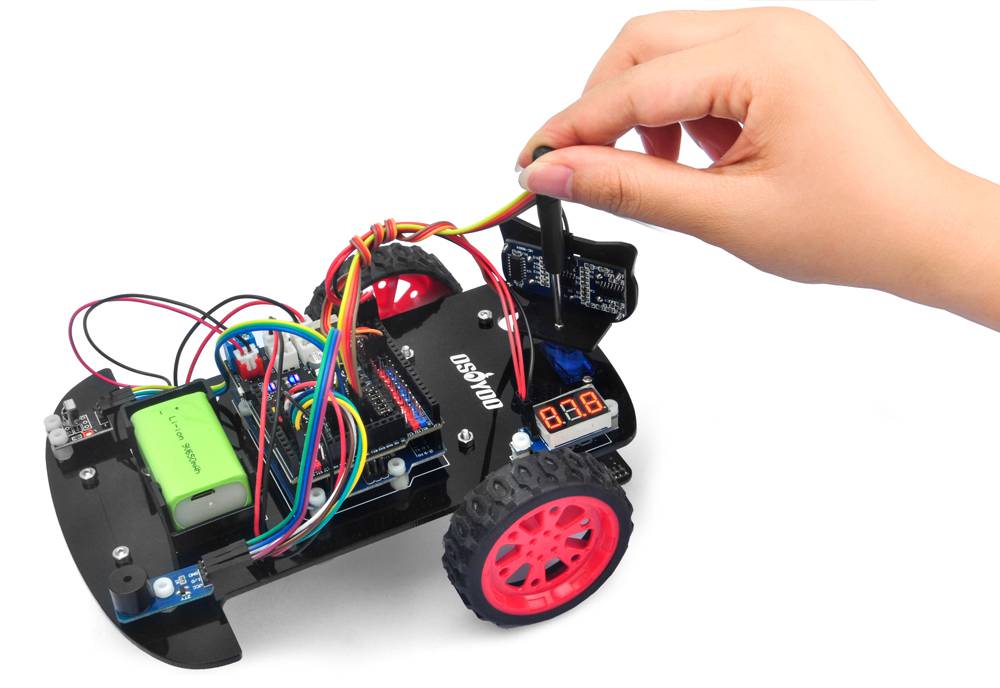
Allineamento iniziale della direzione del sensore ultrasonico servo
Dopo l’accensione dell’auto, sentirai un lungo segnale acustico, poi il servo farà alcuni movimenti e infine si fermerà in una direzione per 5 secondi.
Durante questi primi cinque secondi, devi assicurarti che il sensore ultrasonico (due occhi) sia rivolto dritto in avanti.
Se non è dritto in avanti, devi spegnere immediatamente l’auto e rimuovere il sensore dal servo, reinstallarlo e farlo puntare nella direzione dritta in avanti come nella figura qui sotto. Altrimenti il programma di evitamento degli ostacoli non funzionerà correttamente.
Dopo aver regolato la direzione del sensore, accendi nuovamente l’auto. Dopo aver sentito il segnale acustico lungo, il sensore dovrebbe essere rivolto verso il frontale come nella figura qui sotto. Se la sua direzione non è dritta in avanti, spegni l’auto e regola nuovamente la direzione.
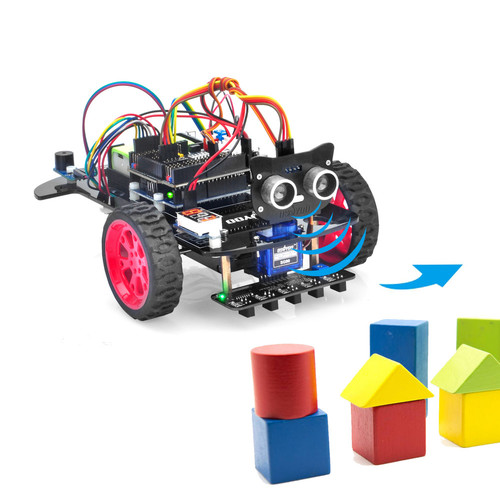
Test finale:
Accendi l’auto, se il modulo ultrasonico si gira in posizione frontale, significa che non devi più regolare la posizione del sensore. Aspetta solo 5 secondi. Se non viene rilevato alcun ostacolo, l’auto procederà in avanti. Se viene rilevato un ostacolo, l’auto si fermerà, il modulo ultrasonico si girerà da destra a sinistra per rilevare gli ostacoli circostanti. L’auto robot deciderà di girare a sinistra, a destra o indietro in base ai dati rilevati degli ostacoli e all’algoritmo di evitamento degli ostacoli.
Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
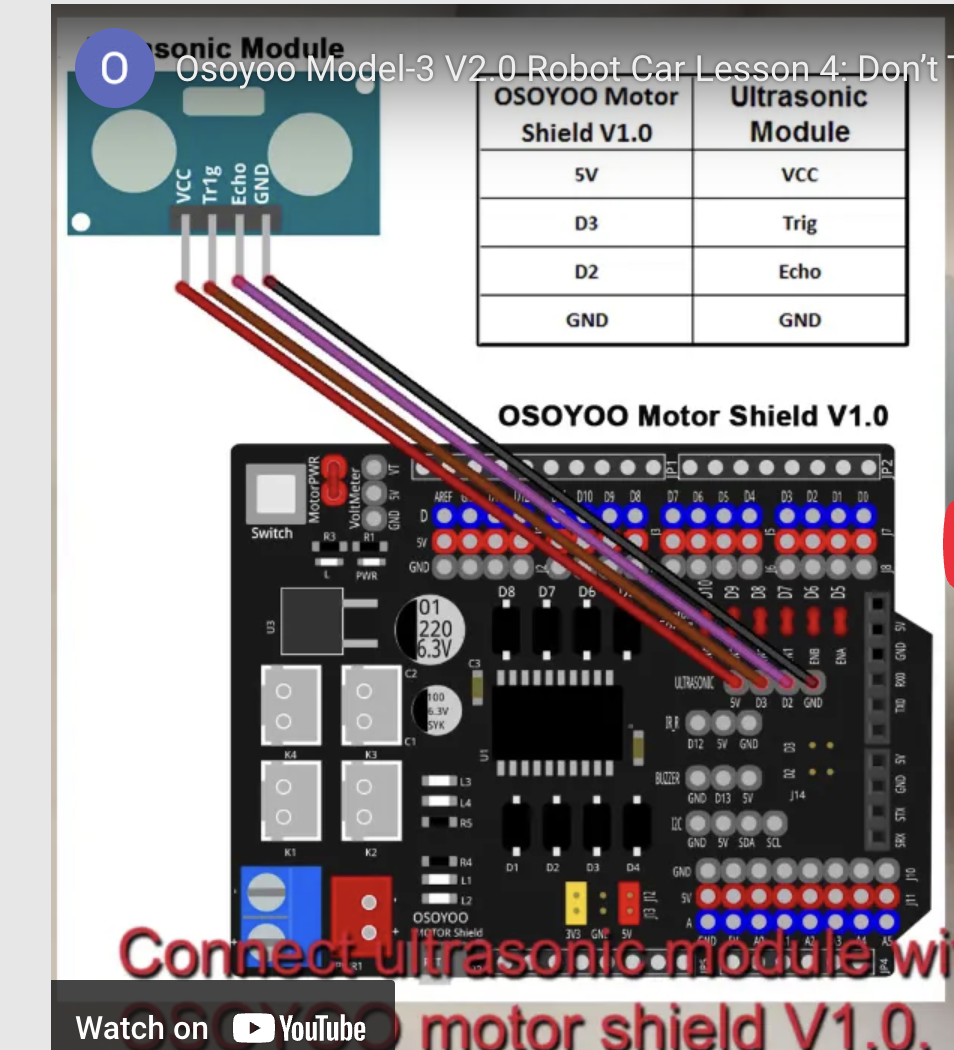
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.





























Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
bonjour je ne comprend pas la voiture tourne sa tête mais au lieu d’avancer, elle recule de plus elle ne répond plus a la télécomande Merci
If you meet this problem in the lesson Obstacle avoidance, please check the wires on Ultrosonic Sensor or change another Ultrosonic Sensor
Hi, when i did this lesson the car kept on moving back without doing anything and the car when i plug it in my computer it trys to move back
Hi, the robot is just seeing obstacles everywhere? So it scans around, then turns 90 degrees eternally – what’s wrong here?
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
Don’t you guys have a mblock graphic programming for this one like the one for the Model T. Would be very didactic for the little kids.
Thanks
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.