Panoramica
Lo Shield motore OSOYOO è basato sul L293DD (datasheet), che è un driver a quattro canali monolitico integrato ad alta tensione e alta corrente progettato per accettare livelli logici standard DTL o TTL e guidare carichi induttivi (come relè, solenoidi, motori DC e passo-passo) e transistor di potenza di commutazione. Per evitare danni alla scheda, tutte le linee del driver sono protette da diodi dalla back EMF. La tensione di alimentazione massima supportata da questa scheda è 20V.
Utilizza un chip L293DD che fornisce una corrente di uscita fino a 1,2A per ogni canale. richiede un’ alimentazione da 6V a 15V per alimentare il motore e include anche un regolatore di tensione a bordo da 5V per alimentare il chip del driver. Consente di guidare due motori DC con la tua scheda Arduino, controllando la velocità e la direzione di ciascuno indipendentemente.
Puoi utilizzare il microcontrollore UNO R3 e aggiungere componenti esterni per completare una varietà di incredibili esperimenti, come la creazione di un robot intelligente fai-da-te. Quando costruisci il tuo robot, è necessario utilizzare la scheda del driver del motore per controllare i motori DC, tuttavia, talvolta è necessario collegare la scheda del driver del motore all’UNO utilizzando molti cavi jumper, abbastanza scomodo.
Lo shield del motore può essere alimentato direttamente dall’Arduino o da una fonte di alimentazione esterna. Si consiglia vivamente di utilizzare un’ alimentazione esterna per alimentare lo shield del motore.
Questa scheda fornisce anche indicatori LED di direzione per entrambi i canali ed è molto utile durante la fase di configurazione per verificare il comportamento del firmware; gli indicatori LED funzionano anche senza applicare un vero motore all’uscita.
Caratteristiche
- Pin out standard per UNO Shield
- Basato sul chip del driver del motore L293DD
- Guida 2 motori DC o 1 Stepper
- Ingresso di alimentazione esterna disponibile
- Interruttore di alimentazione esterna
- Pulsante RST
- Interfacce di alimentazione 5V/3.3V/GND
- Jumper interruttore di alimentazione del driver del motore
- Interfaccia uart hardware/interfaccia uart software
- Interfacce sensori
- Tutti i pin GPIO
- Cablaggio conveniente relativo al motore tramite jumper
- 4 luci indicatrici di direzione
- Dissipatore di calore per una migliore performance
- Funzione di aggiunta di Wifi IoT quando si lavora con il modulo Wifi OSOYOO (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Funzione Bluetooth quando si lavora con il modulo Bluetooth HC-02 (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)ATTENZIONE:
Il Driver IC e il dissipatore di calore possono diventare molto caldi quando si lavora con una corrente superiore a 1000 mA.
Specifiche
- Parte logica della tensione di ingresso VD: 5V
- Tensione di ingresso (raccomandata): 7 ~ 12V
- Tensione di ingresso (limite): 6-20V
- Parte logica della corrente di lavoro Iss: <36mA
- Parte di guida della corrente di funzionamento Io: 1,2A
- Massima dissipazione di potenza: 25W (T = 75 Celsius)
- Livello di ingresso del segnale di controllo: Alto 2,3V basso -0,3V
- Temperatura di lavoro: -25 + 130 Celsius
- Presa di alimentazione a vite: morsettiera a passo 5.0mm
- Clip a cintura e può essere controllato tramite l’accesso al segnale della fila anteriore
- Tipo di guida: driver H-bridge a doppia alimentazione
- Occupazione del pin: D7 ~ D10 guida diretta del motore
- Supporta la velocità del motore in modalità PWM/PLL
- Peso 29 g
- Dimensioni 68,5 x 53 mm
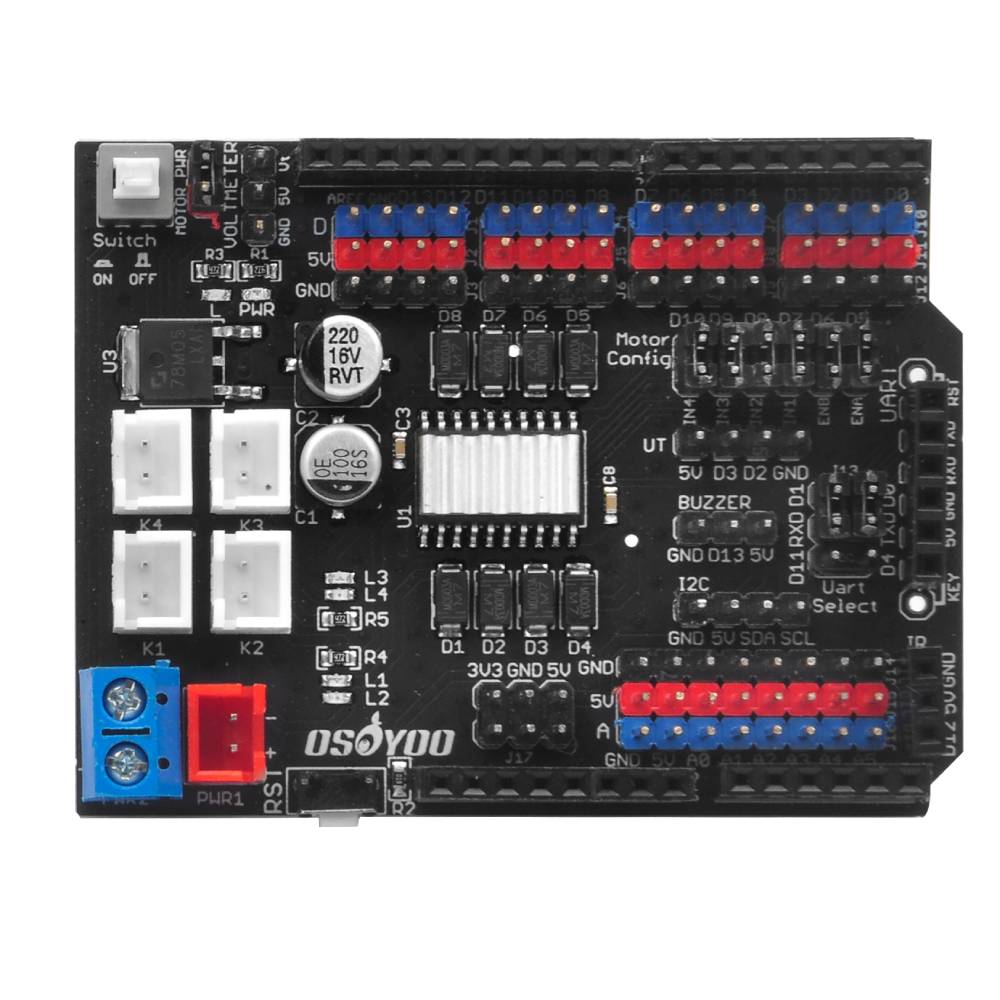
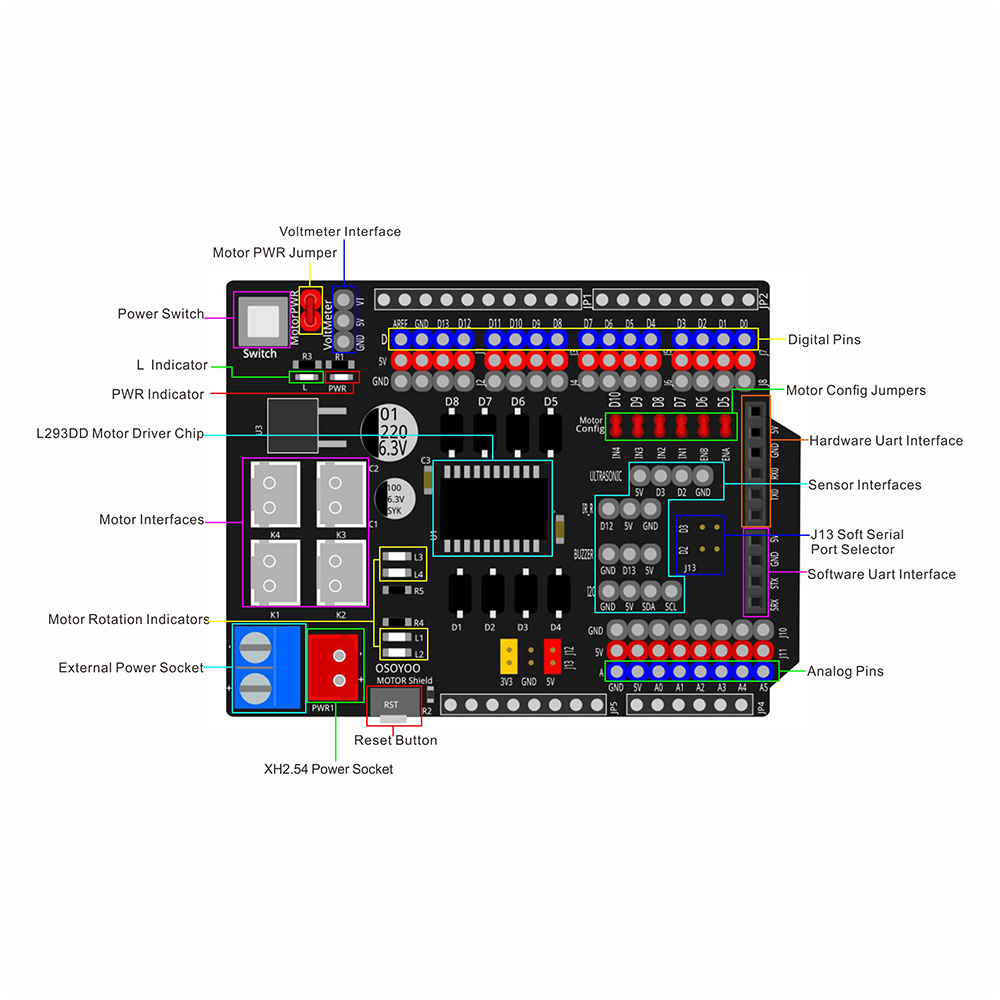
Panoramica dell’Hardware
-
- Interruttore di alimentazione: controlla l’alimentazione esterna, premi l’interruttore per accendere l’alimentazione, premi nuovamente per spegnere l’alimentazione.
- Jumper di alimentazione del motore: collega il cappuccio del jumper, il chip di guida del motore funziona normalmente, rimuovi il cappuccio del jumper e smette di funzionare.
- Interfaccia VOLTMETER: interfaccia voltmeter digitale a tre fili, visualizza la tensione dell’alimentazione esterna.
- Uscita pin digitale: esce dalle interfacce di segnale digitale.
- Indicatore L: collegato al pin Arduino D13.
- Indicatore PWR:
- Jumper di configurazione del motore: quando il jumper è collegato, il pin di controllo del chip del motore è collegato alla porta io Arduino corrispondente per impostazione predefinita. Se necessario, è possibile anche rimuovere il cappuccio del jumper e collegare altri pin io Arduino tramite cavo Dupont per controllare il motore.
Motore IN1-Arduino D7
Motore IN2-Arduino D8
Motore IN3-Arduino D9
Motore IN4-Arduino D10
Motore ENA-Arduino D5
Motore ENB-Arduino D6
- Interfaccia del motore: K1 e K2 (K3 e K4) possono collegare il motore A(B) per il motore DC.
- Chip del driver del motore L293DD
- Indicatori di rotazione del motore
- Presa di alimentazione esterna (presa di alimentazione blu / presa di alimentazione XH2.54): alimentazione esterna per Motor Shield, intervallo 6-15V.
- Pulsante di reset: premuto per ripristinare il shield e Arduino.
- Uscita pin analogica
- Interfacce per sensori: Per facilitare la cablaggio, abbiamo progettato interfacce corrispondenti per sensori comunemente utilizzati e le abbiamo collegate ai pin di segnale di Arduino.
- Interfaccia hardware Uart: Collega l’Arduino D1 a TX0 e collega l’Arduino D0 a RX0.
- Interfaccia software Uart: Collegati ai pin che consentono la comunicazione seriale su Arduino.
- Selettore della porta seriale software J13: J13 fornisce un modo conveniente per impostare la porta seriale software. Puoi utilizzare un ponticello per impostare i porti D2 e D3 come porte seriali software. Se hai bisogno di utilizzare altri pin, puoi rimuovere il cappuccio del ponticello e utilizzare fili di collegamento per connettere S_TX/S_RX a quei pin che consentono la comunicazione seriale su Arduino.
- Download del file parte Fritzing: https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip









Hello!
I want to use Arduino attachInterrupt() to pins D2 and D3 (to perform pulse counting). Are these used by the UltraSonic sensor?
D3 does not seem to rise above 2.5V and I am trying to understand why.
Many thanks,
– jon
FWIW: This was my coding error. Pin3 was set to output using pinMode(Trig_PIN, OUTPUT); I need to move the echo sensor to other, unused, pins.
Hi,
I am trying to use the soft UART serial ports SRX and STX on the motor project for two-port receive. What should I define the two pins as(using SoftwareSerial Library)?
Also, if I were to use the J13 serial ports and the SRX/TX ports at the same time, would the arduino communicate with both ports at the same time? If so, what should I write in my code to declare them as?
Hi there!
I want to know how can I, using block programming, reverse the motors direction but as one of them is connected to Digital Pin 8 and another to Pin 10 (K2 & K3 or K1 and K2) I have no mean to do it through the normal HIGH/LOW values (full speed vs. stop, but no reverse).
Thanks!
in order to use mBlock programming, you need connect
IN1 —D12 //Left motor direction
IN2 —D11 //Left motor direction
IN3 —D9 //Right motor direction
IN4 —D10 //Right motor direction
ENA —D5 // Needs to be a PWM pin to be able to control motor speed ENA
ENB —D6 // Needs to be a PWM pin to be able to control motor speed ENB
You can use Forward Block to make car move forward and Backward to make car make reverse roate.
For more information, please read following project:
https://osoyoo.com/2021/08/22/arduino-graphic-programming-learning-kit-lesson-14-basic-car/