In questo tutorial, useremo OSOYOO Sport Car per Arduino per fare alcuni semplici movimenti. Una volta completata l’installazione dell’auto, è molto importante testare l’installazione e il codice di esempio. Se hai superato il movimento di prova di questa lezione, significa che la scheda base OSOYOO per Arduino, il modulo di controllo motore, i motori, le batterie, lo chassis e le connessioni dei fili tra queste parti funzionano bene.
Se non completi il telaio dell’auto, rivedi la lezione 1
Passo 1: Scarica il file zip della libreria PWMServo dal https://osoyoo.com/driver/sg90car/PWMServo.zip,
quindi importa la libreria nell’IDE Arduino (Apri Arduino IDE → fai clic su Sketch → Include library → Aggiungi .Zip Libreria)
Vedrai una finestra pop-up, ora puoi andare alla cartella di download e selezionare il file PWMServo.zip e caricare questo file nella libreria Arduino.
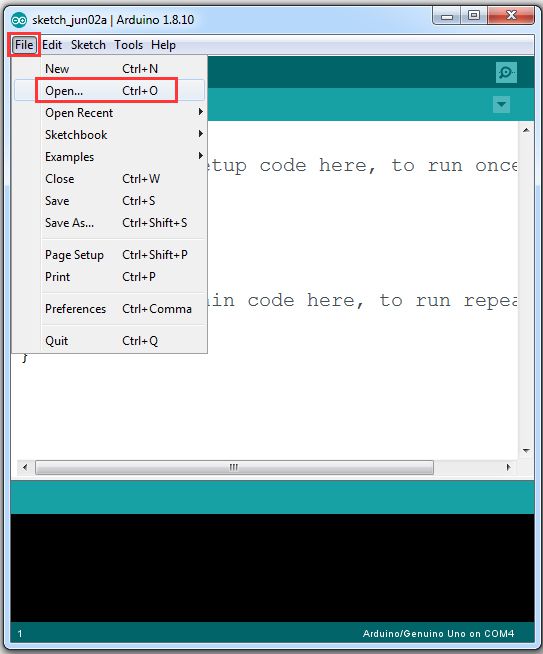
Passaggio 2: Scarica il codice di esempio della lezione 2, decomprimi il file zip di download sg90car-lesson2b.zip, vedrai una cartella chiamata sg90car-lesson2. Passo 3: Collegare la scheda UNO R3 al PC con cavo USB, aprire Arduino IDE → fare clic su file → fare clic su Open → scegliere il codice “sg90car-lesson2.ino” nella cartella sg90car-lesson2, caricare il codice nella scheda base OSOYOO per Arduino. Avviso: spegnere la batteria o scollegare l’alimentatore quando si carica il codice sketch sulla scheda base OSOYOO per Arduino.
Passaggio 4: Modificare il valore predefinito 90 nella riga 19 come valore FRONT nella lezione 1. Se si allinea manualmente la direzione della ruota come opzione 1 nel passaggio 5 della lezione1, saltare questo passaggio.
#define FRONT 90 // steering to front
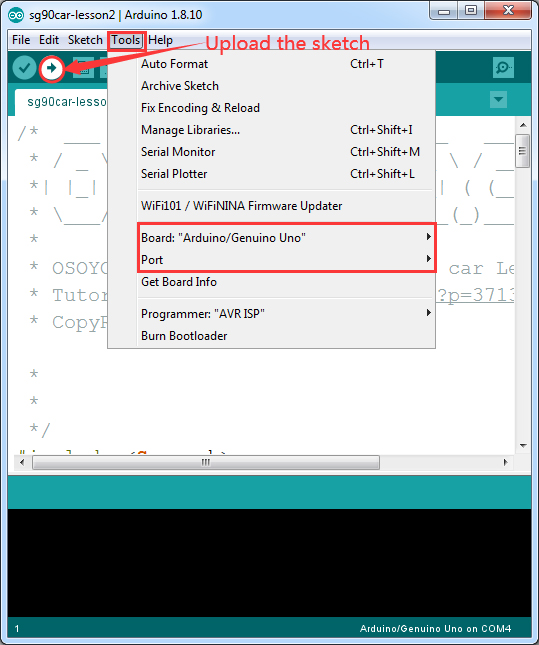
Passaggio 5: Scegli la scheda / porta corrispondente per il tuo progetto, carica lo schizzo sulla scheda.
Collaudo finale
1. Scollegare la scheda di base OSOYOO per Arduino dal PC e confermare che l’interruttore di alimentazione di OSOYOO Motor Shield V1.1 sia spento, quindi inserire una batteria da 9 V nella scatola della batteria. (Nota: assicurarsi che la direzione polare sia corretta, altrimenti può distruggere il dispositivo e causare pericolo di incendio).
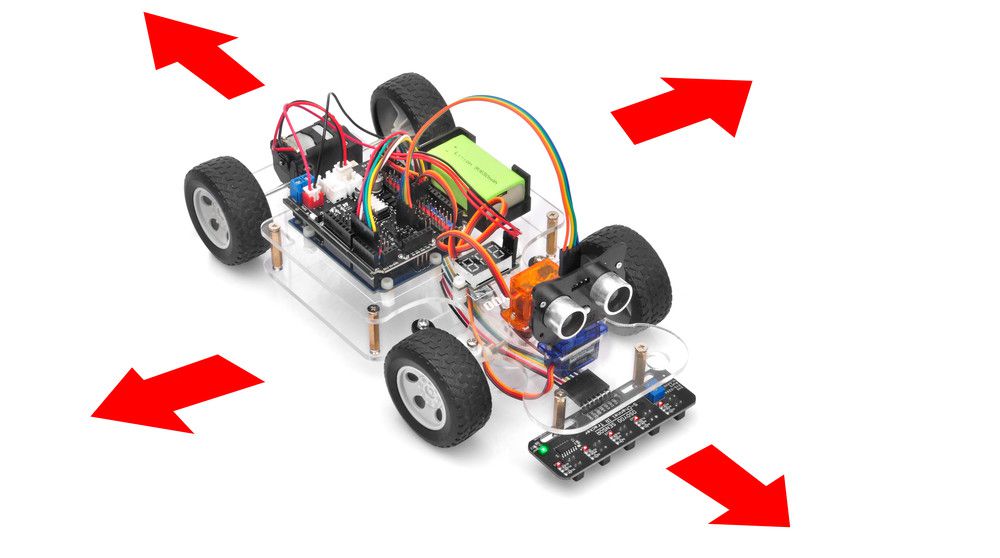
2. Metti l’auto a terra, accendi l’interruttore di OSOYOO Motor Shield V1.1, l’auto dovrebbe andare avanti, indietro, girare a sinistra, girare a destra, andare indietro, indietro a destra, di nuovo a sinistra, quindi fermarsi. Nota: se l’auto non si muove secondo il risultato sopra menzionato, è necessario controllare la connessione del cavo, i tappi dei ponticelli su OSOYOO Motor Shield V1.1, la tensione della batteria (deve essere superiore a 7,2 v).
3. Se vuoi cambiare l’angelo di destra o di sinistra, modifica le righe 20 e 21 del codice e carica di nuovo lo schizzo: (Nota: l’angelo non può essere impostato più di 35. Le ruoteposteriori sono azionate senza differenziale dell’asse posteriore tra motore e ruote. Ma tutte e quattro le ruote hanno una buona presa sul pavimento. Più le ruote anteriori sono girate a sinistra o a destra, più frenano contro le ruote posteriori. A partire da una certa angolazione, questa forza frenante è maggiore della forza motrice del motore – quindi il motore si fermerà.)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
4. Se si desidera modificare la velocità dell’auto, si prega di rivedere il seguente codice dello schizzo (Nota: il valore massimo è 255)