


| Acquista su US |
Acquista su UK |
Acquista su DE |
Acquista su IT |
Acquista su FR |
Acquista su ES |
Acquista su JP |
 |
 |
 |
 |
 |
 |
 |

Nella lezione 14, abbiamo imparato ad usare il sensore di tracciamento IR (sensore bianco/nero). In questo progetto, usiamo due sensori d’inseguimento IR per progettare una semplice robot che segue la linea, come suggerisce il nome, è un veicolo a guida automatica che segue una linea nera stampata sul terreno bianco. I sensori di tracciamento nel robot continuano a controllare se la posizione attuale dell’auto è fuori dalla traccia. Se sì, allora l’auto farà un movimento negativo per riportare l’auto robotica in pista.

- Scheda OSOYOO UNO (pienamente compatibile con Arduino UNO rev.3) x 1
- OSOYOO Magic I/O Shield per Arduino x1
- OSOYOO Modulo sensore di tracciamento x2
- OSOYOO Cavo PNP a 3 pin 10cm x 6
- OSOYOO Cavo PNP a 3 pin 20cm x 2
- OSOYOO Cavo PNP a 4 pin 20cm x 1
- Piattaforma acrilica x1Motore di trasmissione con due ruote
- Cavo USB
Attenzione:
Non è necessario molto per questa lezione, assicuratevi di avere un cavo di sincronizzazione di buona qualità, non scegliete un cavo USB ‘solo per la ricarica’.

Installare la struttura di base della smart car come da Lezione 21, se avete già completato l’installazione nella Lezione 23, mantenetela così com’è.
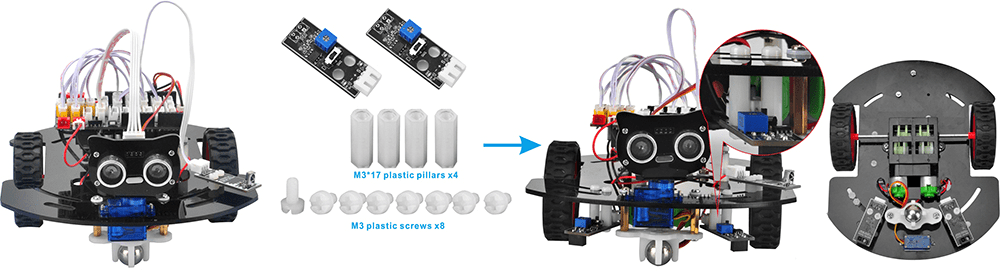
Passo 1: Installare il sensore di tracciamento sinistro e destro con viti M3*6 plasctic, M3*17 pilastri di plastica.Assicurarsi che ogni la testa del potenziometro è tra le lacune sul lato anteriore del telaio auto in modo da ottenere il miglior stato di sensibilità: il segnale indicare la luce LED si accende quando il sensore è sopra la terra bianca, e il LED di segnale si spegne quando il sensore è sopra la pista nera.
Passo 2: Quindi collegare i sensori di tracciamento sinistro e destro alla porta D2 e D3 dello Shield Magic I/O con un cavo PNP a 3 pin come sotto: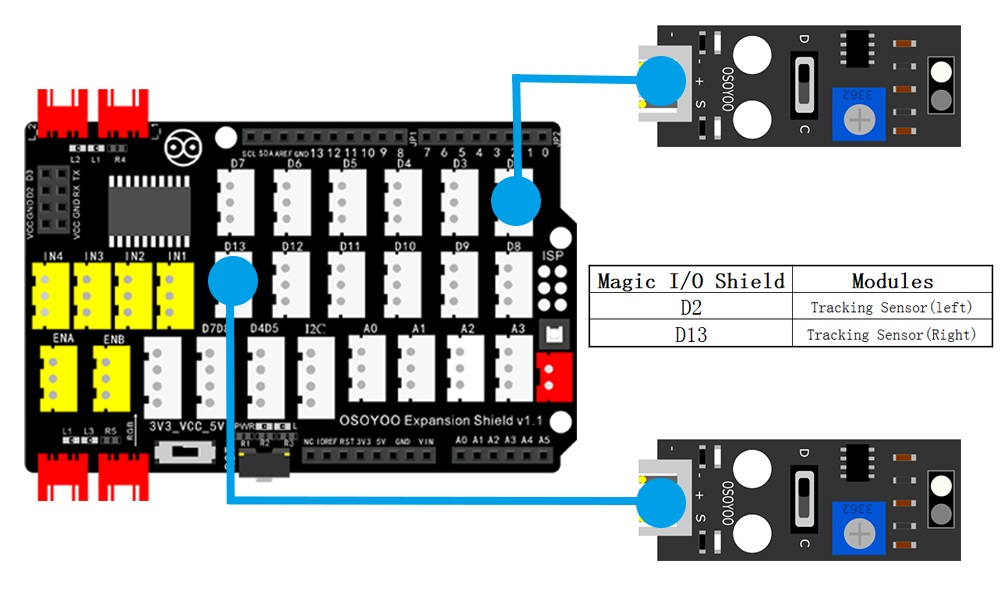

Passo 1: Clicca su Control, trascina il blocco Forever nell’area di programmazione, come mostrato:

Passo 2: Clicca su Events, aggiungi il blocco when Arduino Uno starts up all’inizio: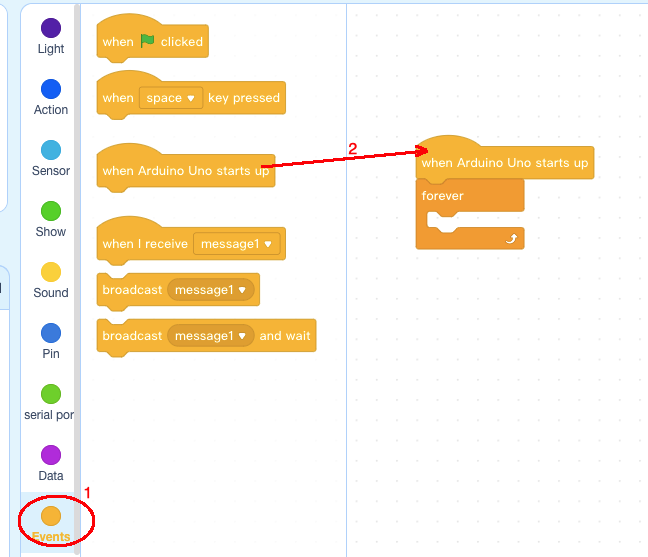
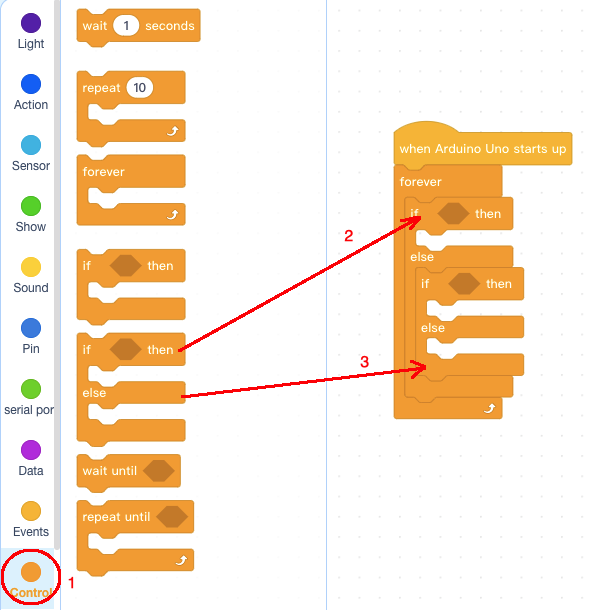
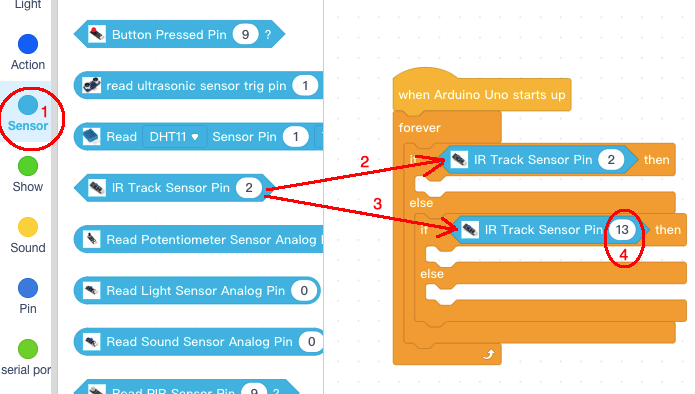
Passo 3: Clicca su Control, aggiungi un blocco if else dentro il ciclo forever, poi aggiungi un altro blocco if else nell’area del else del primo blocco if else:
Passo 4: Clicca su Sensor, aggiungi 2 blocchi IR Tracking Sensor Pin 2 dentro la condizione if, cambia il secondo numero Pin da 2 a 13 come segue:
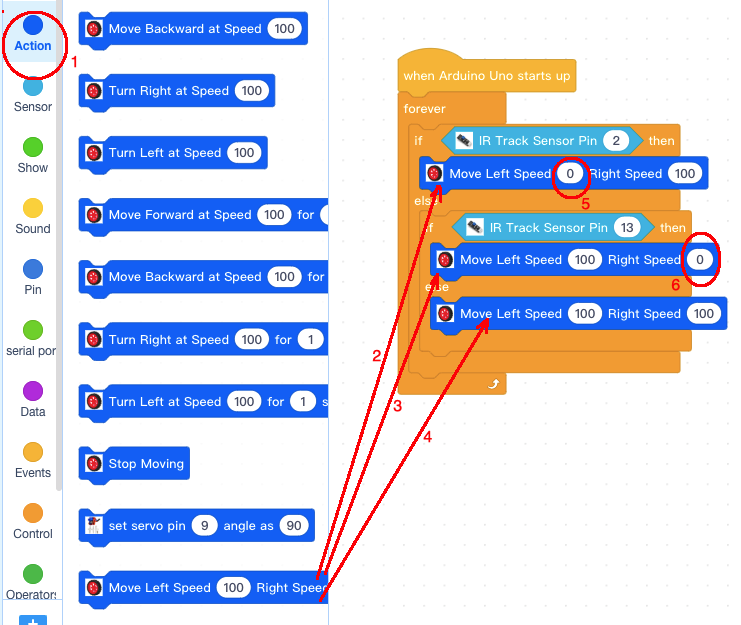
Passo 5: Clicca sulla categoria Action, aggiungi3 blocchi Move Left Speed 100 Right Speed 100 dentro il blocco if else , cambia prima la velocità di Left da 100 a 0, cambia la seconda velocità di Right da 100 a 0 :
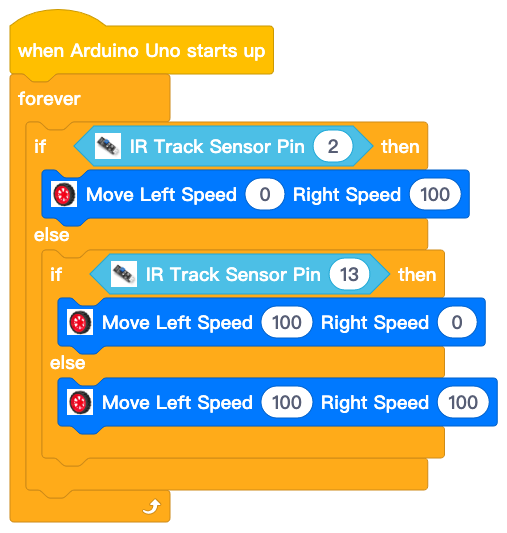
Ora abbiamo completato la programmazione dei blocchi. I blocchi finali appaiono come segue:

Scollegare Arduino dal PC, mettere una batteria da 9V nel battery pox (assicurarsi che la direzione dei poli sia corretta, altrimenti può distruggere il dispositivo e causare pericolo di incendio).
Nella lezione 14, abbiamo imparato come regolare la sensibilità del sensore di tracciamento linea. Accendere e tenere la macchina e regolare la vite di sensibilità sul sensore di tracciamento con un cacciavite fino ad ottenere il migliore stato di sensibilità: il segnale indicare la luce LED si accende quando il sensore è sopra la terra bianca, e il segnale LED si spegne quando il sensore è sopra la pista nera.
Preparare una pista nera (la larghezza della pista nera è più di 30 mm e meno di 60 mm) in terra bianca. Si prega di notare, l’angolo di svolta (curva di curvatura) della pista non può essere due taglienti (più grande di 90 gradi). Se la svolta è troppo brusca, l’auto si muoverà fuori dalla pista.
Accendere l’auto e mettere il centro del modulo sensore di tracciamento rivolto verso la pista nera, e poi l’auto si muoverà lungo la pista nera.









