I mattoni da costruzione OSOYOO sono meccanicamente compatibili con i principali mattoni da costruzione. In questa lezione, useremo i mattoni OSOYOO per costruire un granchio robot che può usare i suoi occhi (sensore a ultrasuoni) per rilevare gli oggetti e usare le pinze (servo delle dita) per prendere gli oggetti.
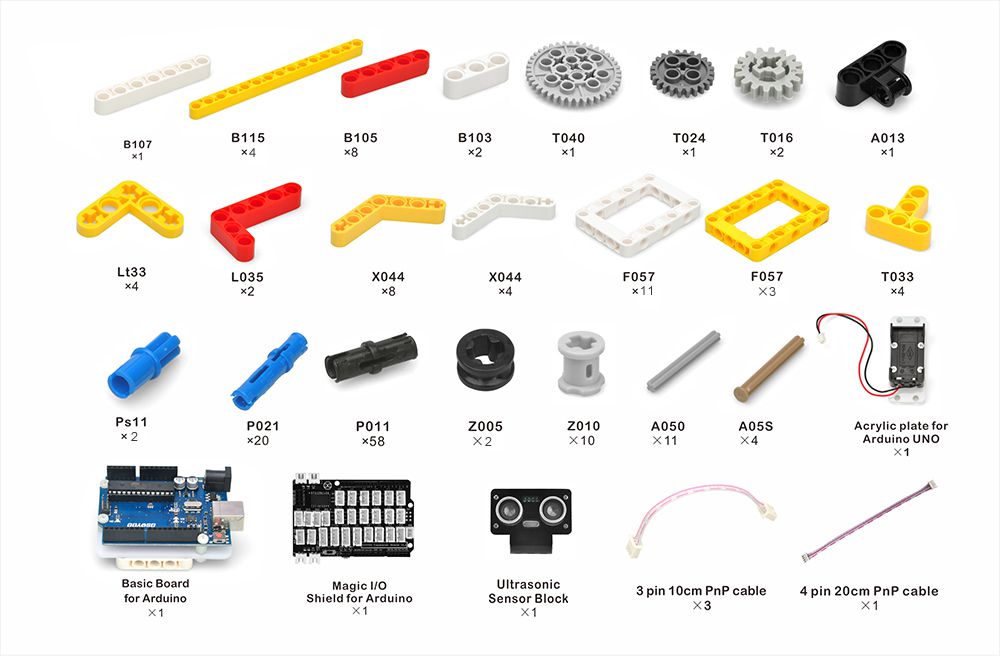
Si prega di preparare le seguenti parti per completare questo progetto
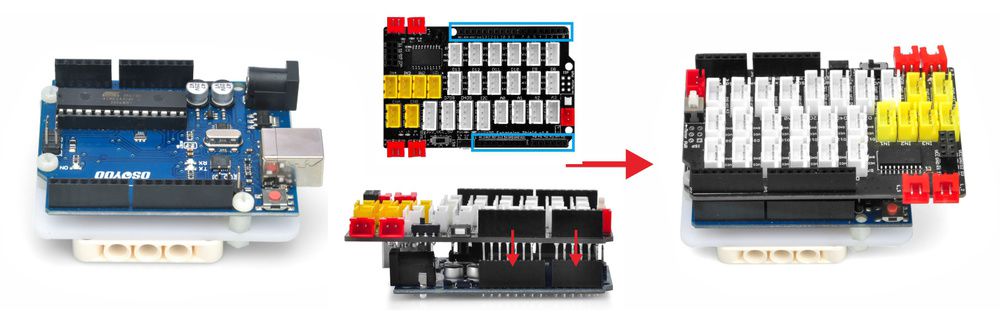
Prima di costruire un ascensore con i blocchi, segui la preparazione prima della lezione 3:
Nota: il colore del blocco di costruzione è soggetto al prodotto reale, che non influenza l’uso.
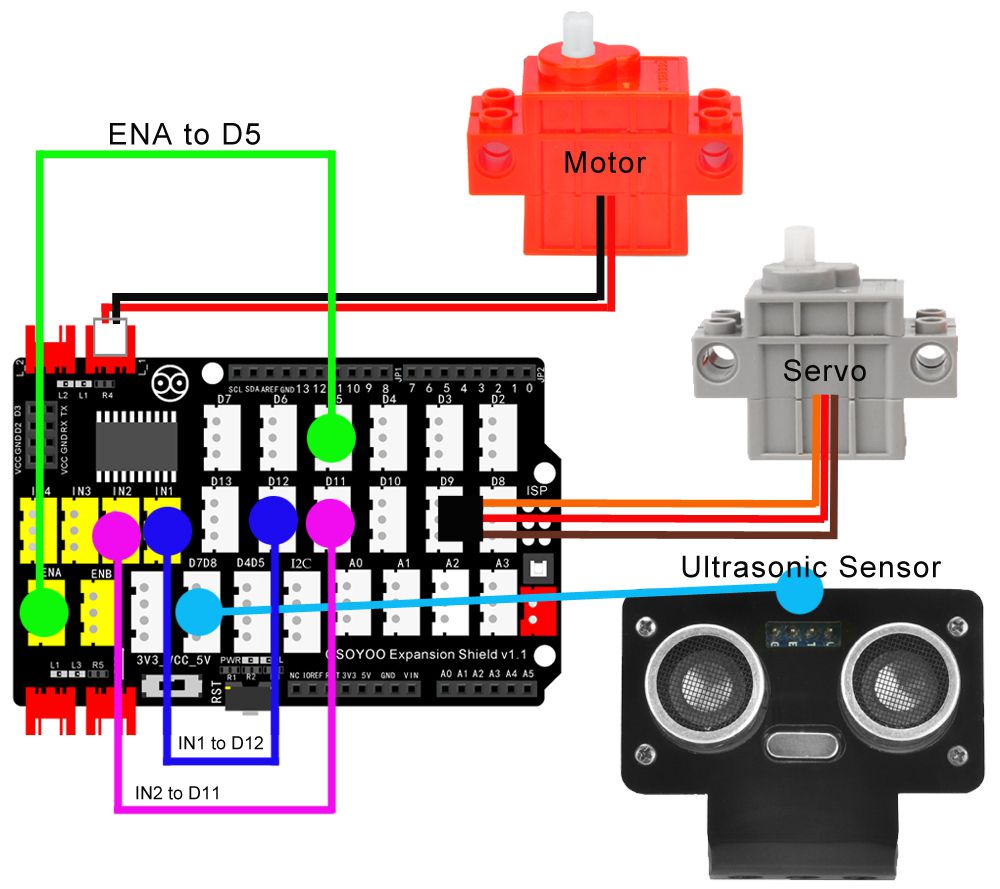
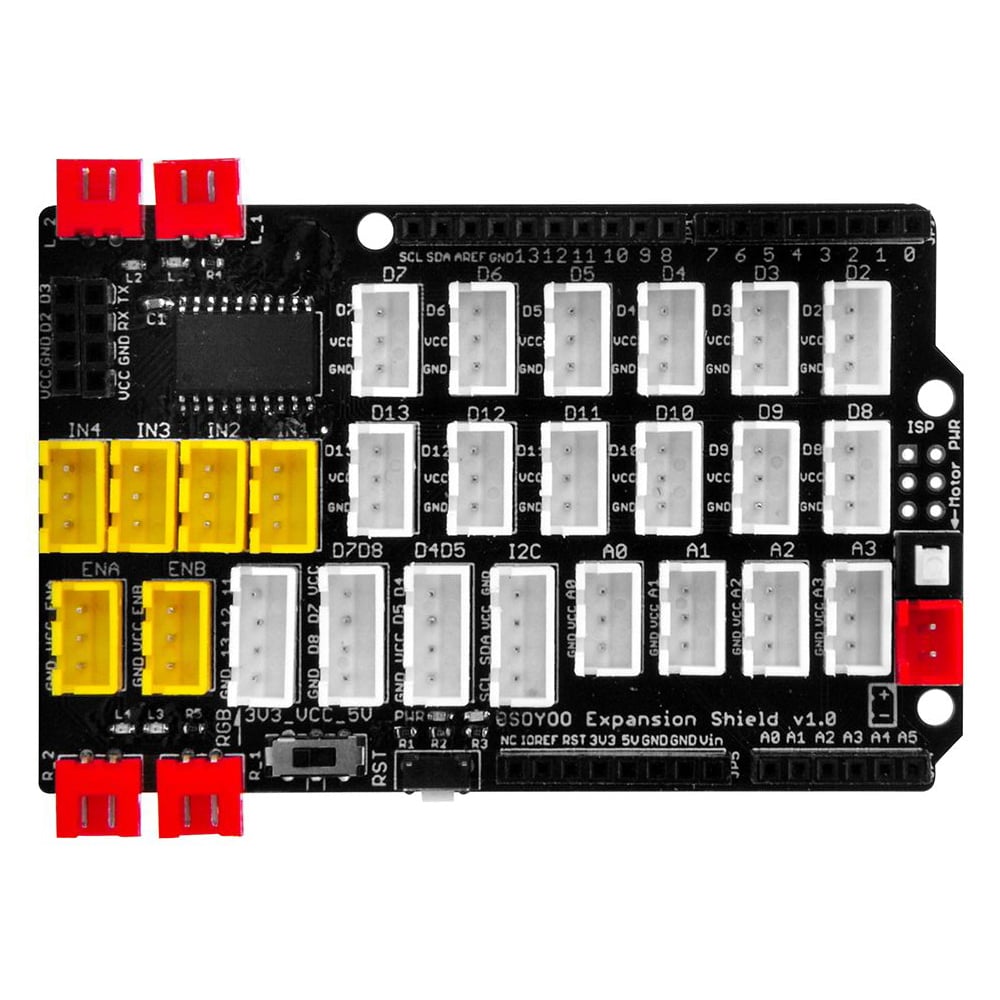
Collegare i fili come da immagine seguente:
Motore (rosso) a L1 o L2
Servo (grigio) alla porta D9
IN1 a D12
IN2 a D11
ENA a D5
Sensore a ultrasuoni alla porta D7D8
Step 1) Download mBlock PC da https://mblock.makeblock.com/en-us/download/, seleziona il file da scaricare secondo il tipo di sistema operativo del tuo computer: Step 2)Scaricare il file del dispositivo OSOYOO_UNO.mext da https://osoyoo.com/driver/mblock/osoyoo_uno.mext
Step 3) Esegui il software mBlock PC facendo doppio clic sull’adorabile icona Panda. Vedrai l’interfaccia utente di mBlock come nell’immagine seguente. Per favore cancella il dispositivo predefinito CyberPi cliccando la croce nel cerchio rosso.
Step 4: Trascinare e rilasciare il file osoyoo_uno_mext (scaricato al punto 2) al software mBlock come segue:
Ora vedrai un nuovo firmware del dispositivo in mBlock, vedi immagine seguente:
Ora il software mBlock e il firmware del dispositivo OSOYOO_UNO sono stati installati con successo nel nostro PC!
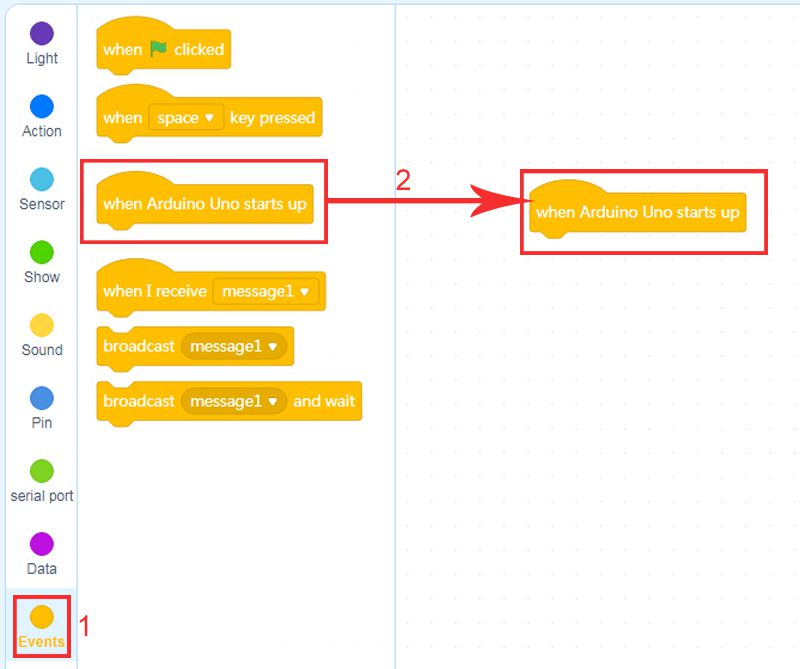
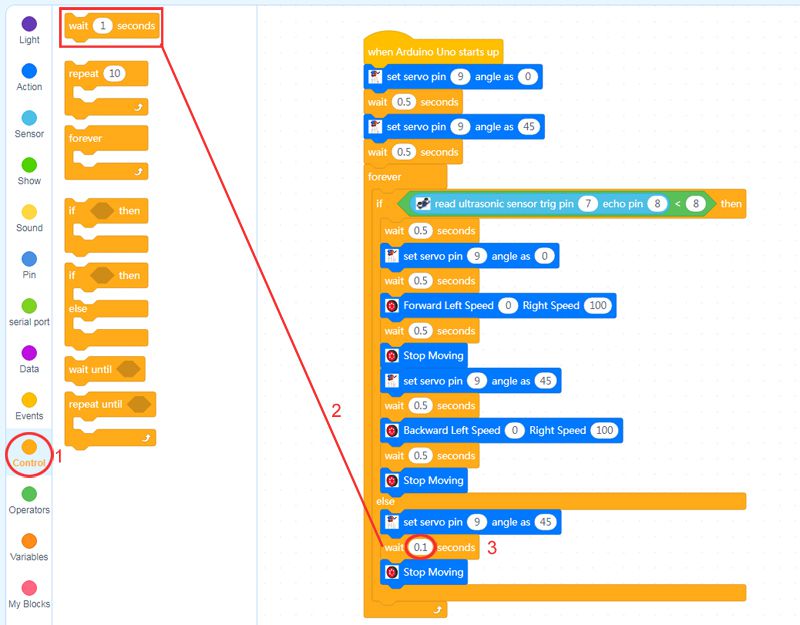
Ora vi mostreremo come usare i blocchi per trasformare il nostro Granchio Robot in realtà. Step 1: Clicca Events, aggiungi il blocco when Arduino Uno starts up nell’area di programmazione:
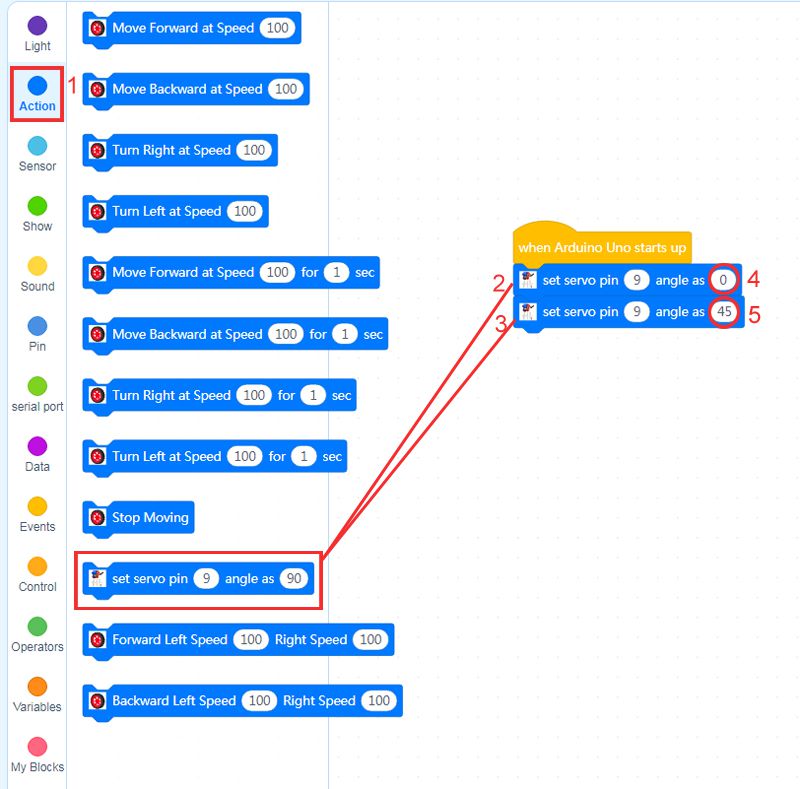
Step 2: Clicca Action, trascina la coppia di blocchi set servo pin 9 Angle as 0 e modifica gli angoli in 0 e 45 come mostrato:
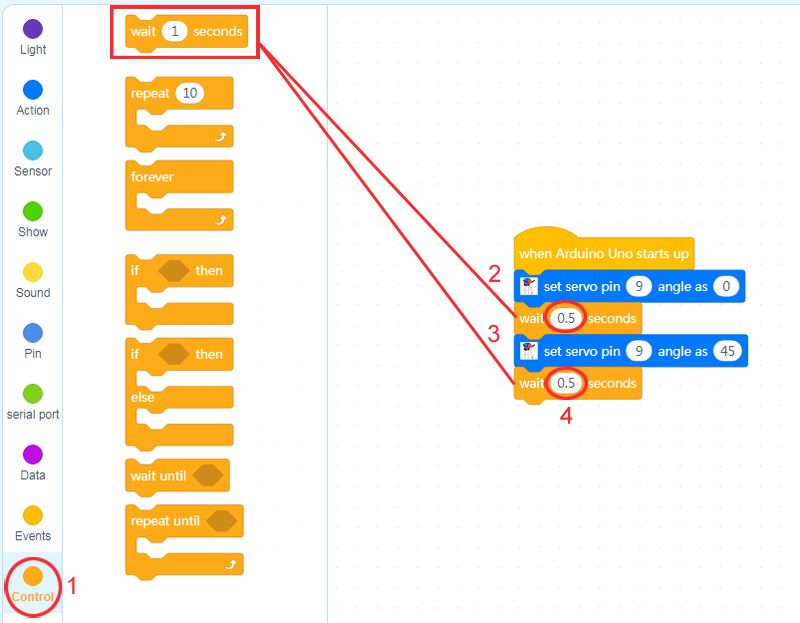
Step 3: Clicca Control, Trascina una coppia di blocchi wait 1 seconds sotto il blocco set servo pin 9 Angle as 0 e modifica 1 in 0.5 come mostrato:
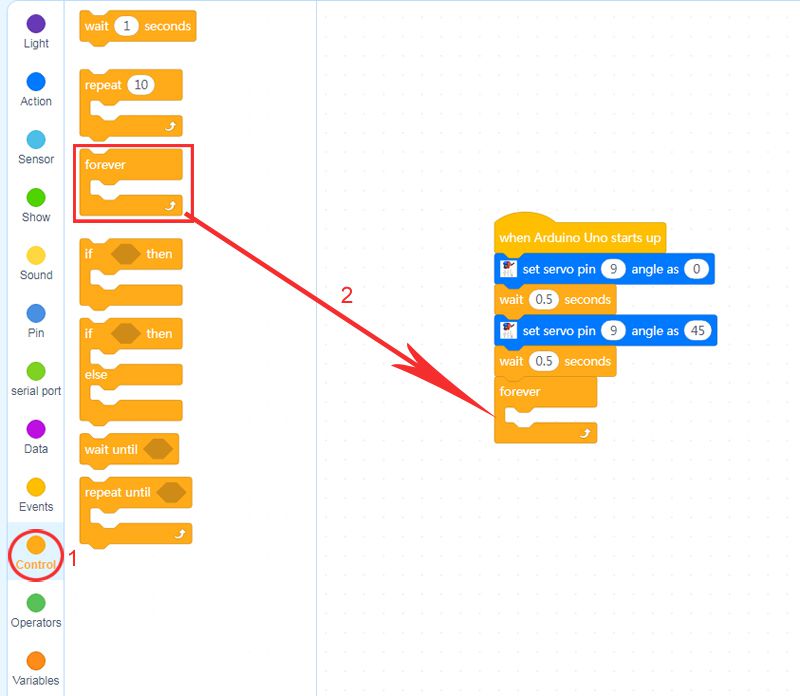
Step 4: Clicca Control, poi trascina e rilascia il blocco Forever sotto il blocco wait x seconds come mostrato:
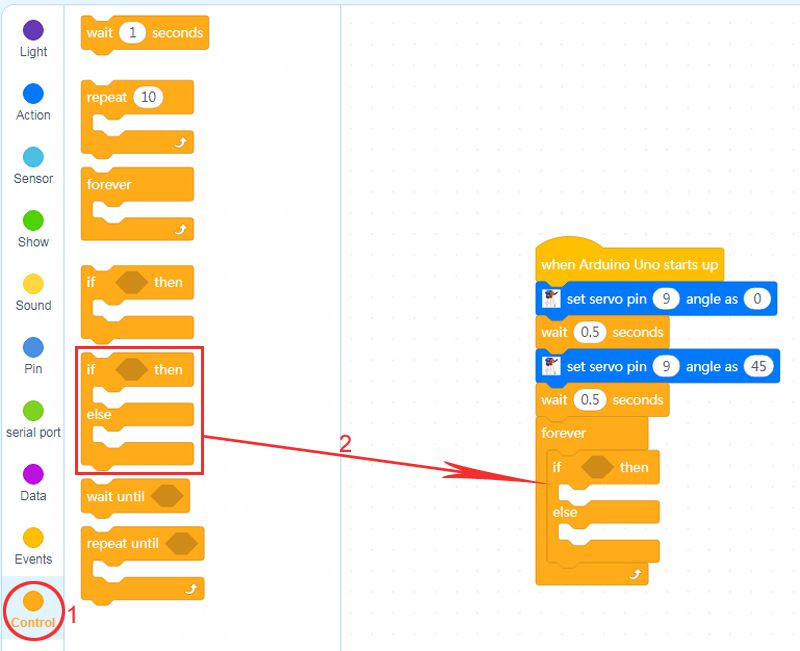
Step 5: Clicca Control, trascina il blocco if-then-else nel loop forever come mostrato:
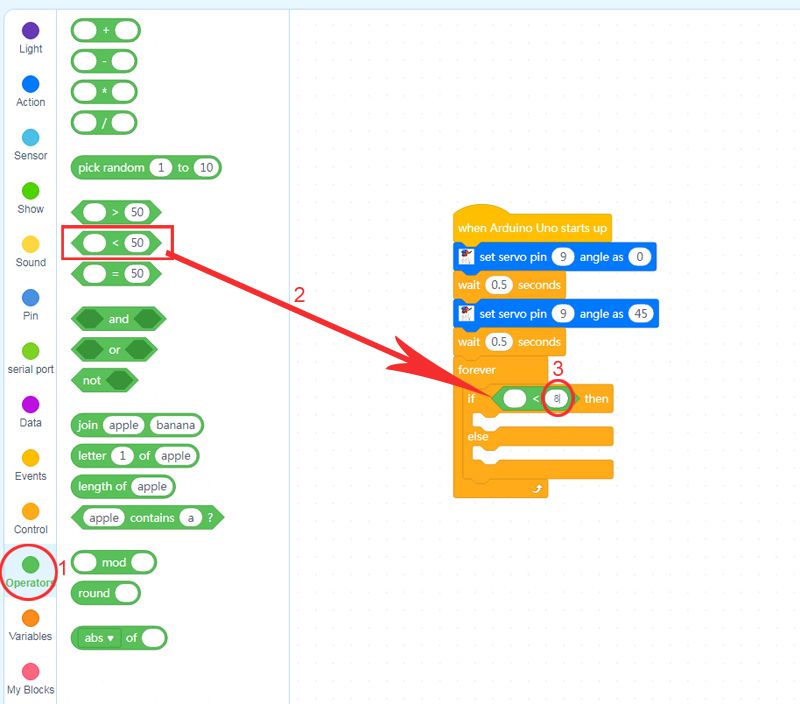
Step 6: Clicca Operation, trascina il blocco X < 50nello spazio nel blocco if-then-else, e modifica 50 in 8 come mostrato:
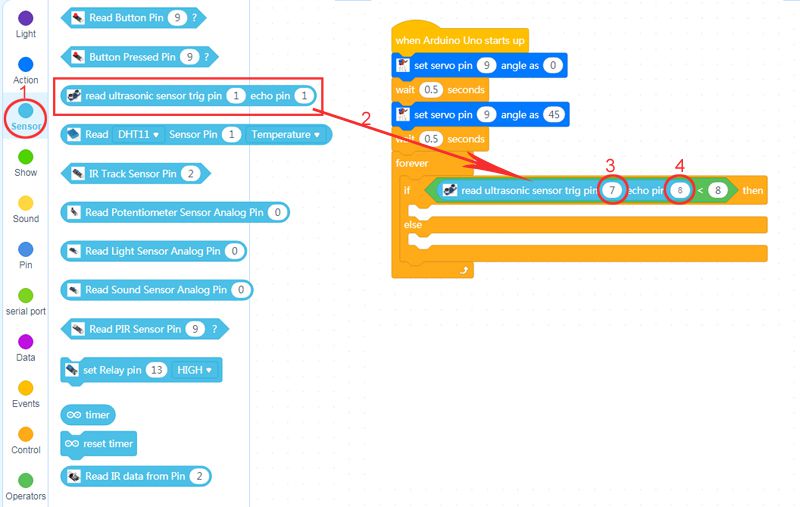
Step 7: Clicca Sensor, Trascina il blocco read ultrasonic sensor trig pin 1 echo pin 1nel primo spazio del blocco X < 8 come mostrato:
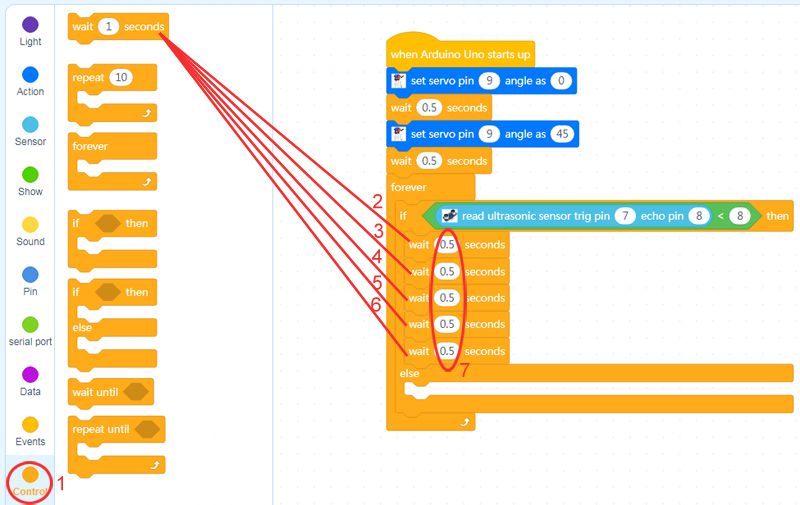
Step 8: Clicca Control, Trascina 5 blocchi Wait 1 seconds“then” nella sezione del blocco if-then-else come mostrato:
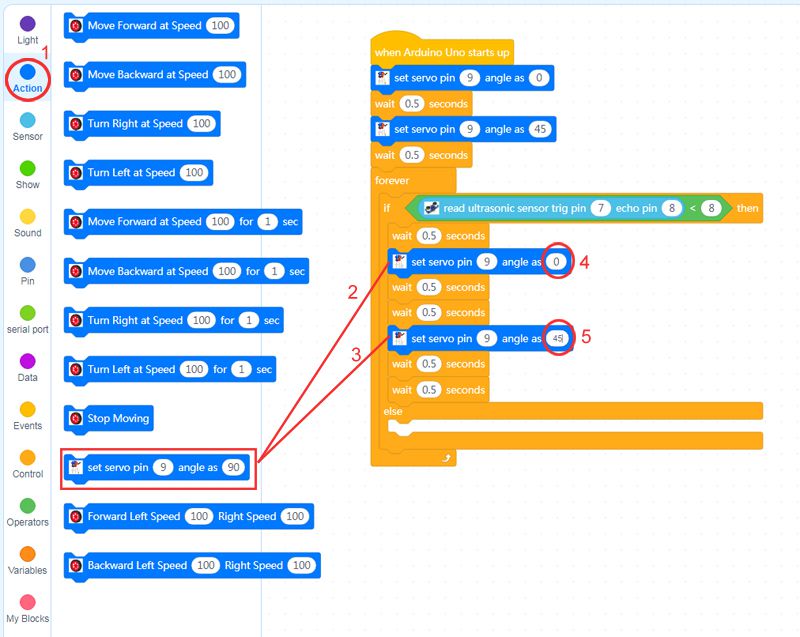
Step 9: Clicca Action , poi trascina la coppia di blocchi set Servo Pin tra 2 blocchi wait 1 seconds e modifica l’angolo 0 e 45 come mostrato:
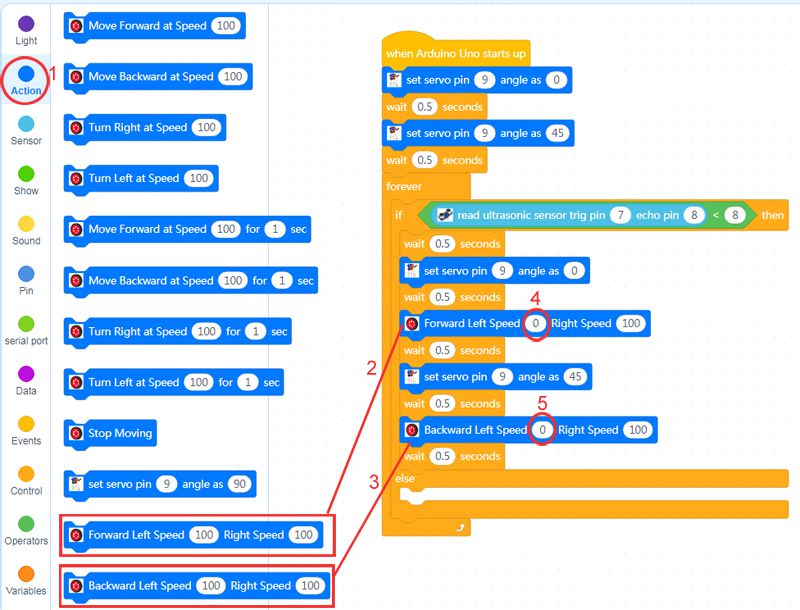
Step 10: Clicca Action , poi trascina il blocco Forward Left Speed 100 Right Speed 100 e il blocco Backward Left Speed 100 Right Speed 100 e modifica Left Speed in 0 come mostrato:
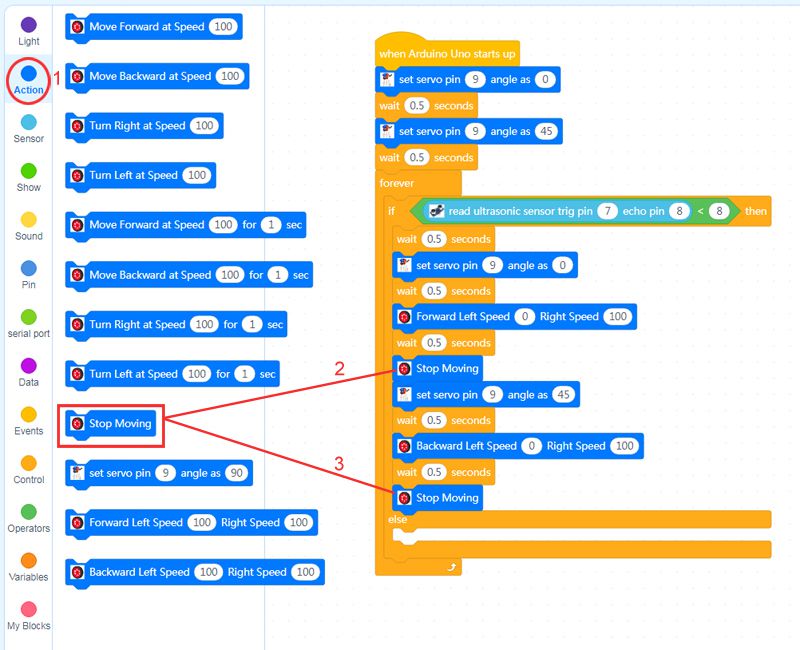
Step 11: Clicca Action , poi trascina la coppia di blocchi Stop Moving sotto wait x seconds come mostrato:
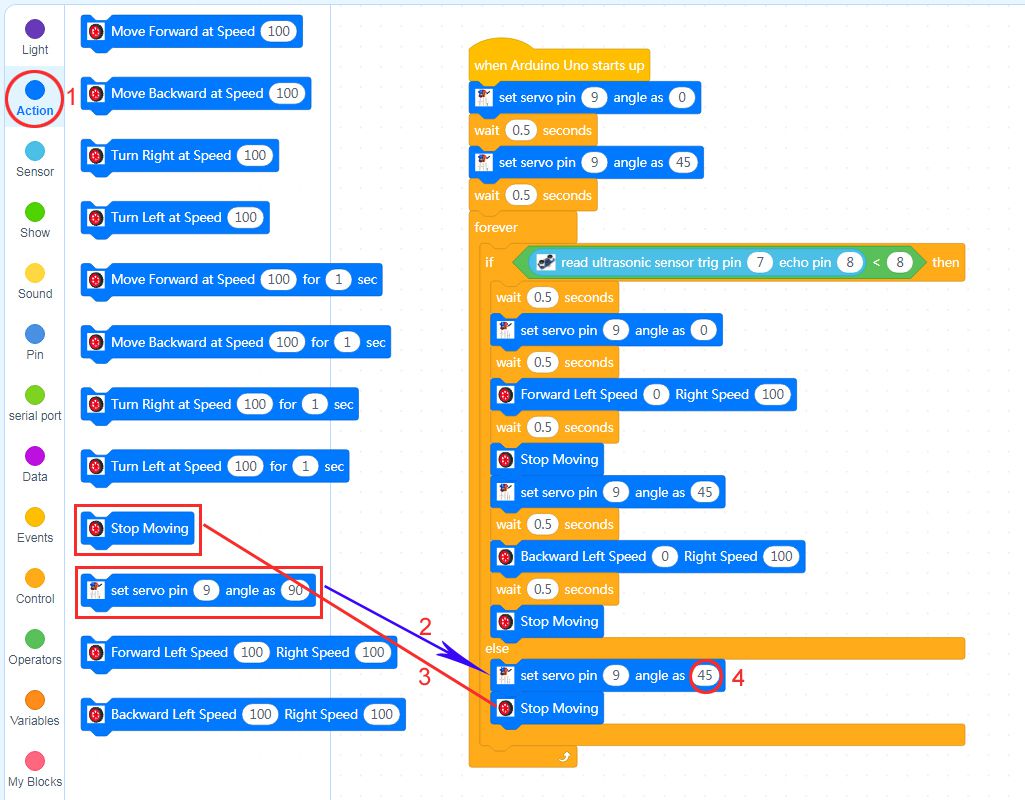
Step 12: Clicca Action , poi trascina il blocco Stop Moving e il lblocco set Servo Pindentro la sezione “else” e modifica l’angolo a 45 come mostrato:
Step 13: Clicca Control , poi trascina il blocco wait 1 seconds e modifica 0.5 seconds come mostrato:
Ora tutti i blocchi di programmazione sono stati completati! Dall’immagine sopra, la logica è abbastanza semplice:
Quando Arduino viene avviato, il granchio si chiuderà all’inizio e poi si aprirà (il mio servo 0 gradi è chiuso e 45 gradi è aperto). Il computer entrerà in un ciclo morto che controllerà la distanza tra l’oggetto e il sensore a ultrasuoni. Quando il sensore ultrasonico “vede” l’oggetto sotto la distanza di 8cm, il granchio si chiude per prendere l’oggetto e il motore sposta il granchio a destra, poi il granchio si apre per buttare via l’oggetto, poi il motore sposta il granchio indietro. Se la distanza è superiore a 8cm, il granchio rimarrà fermo.
Caricare il programma su Arduino:
1) è necessario collegare la scheda Arduino al PC con un cavo USB prima. Poi fare clic sul pulsante Connect nella parte inferiore del software mBlock, si vedrà una finestra USB pop-up,
2) selezionare Mostra tutti i dispositivi collegabili casella di controllo, poi un dispositivo menu a discesa apparirà,
3) selezionare la porta Arduino dal dispositivo menu a discesa
4) fare clic sul pulsante Connect per collegare il PC a Arduino
5)Dopo che il PC è collegato alla scheda Arduino UNO, fare clic sul pulsante Carica nella parte inferiore del software, quindi il codice verrà caricato sulla scheda Arduino UNO:
Ora accendi l’interruttore di alimentazione nella scheda Magic, Arduino inizierà a funzionare. Premi il pulsante su D2, la tua ventola inizia a ruotare e il servo inizia a oscillare. Quando rilasciate il pulsante, la ventola e il servo smetteranno di muoversi.